一种用于武装打击机器人的回转装置的制作方法
本发明涉及特种机器人,尤其涉及一种用于武装打击机器人的回转装置。
背景技术:
1、随着现代军事需求的不断演变,军事机器人在军事作战、侦察、搜索和拯救等领域的应用日益增加。机器人被广泛应用于执行军事任务,以减轻士兵的负担,提高作战效率,并降低潜在的伤亡风险。在这一趋势下,武装打击机器人成为研发和应用的热点。然而,在军事应用中,机器人需要面对复杂多变的环境,包括不平整的地形,高速行进时的振动和冲击等。这些因素可能会影响机器人的稳定性和精确性,尤其是在需要进行精确射击或目标追踪的情况下。因此,装备军事机器人的旋转结构需要具备抗振动、减少冲击、保持精确性的能力。
2、传统的机械旋转结构大多采用齿轮驱动或带轮传动等,在军事机器人的应用中存在一些技术缺陷。首先,上述旋转结构往往缺乏足够的抗振动能力,在高速行进或激烈运动中,振动可能会传递到机器人的旋转结构,导致不稳定和精确度下降。其次,旋转结构的传动装置中,零部件之间可能存在松动或间隙,导致运动的不稳定性和精度下降,可能会影响到机器人的射击和定位能力,使其在军事任务中失去竞争力。此外,机器人需要具备密封功能,以应对复杂环境,防止液体、气体或粉尘进入部件内部,但传统机械旋转结构在密封性上存在不足,易导致装置受到外部环境的影响,降低了军事机器人的可靠性和耐久性。
技术实现思路
1、针对现有技术的不足,本发明提供了一种传动精度高且稳定性强的用于武装打击机器人的回转装置。
2、为实现以上目的,本发明通过以下技术方案予以实现。
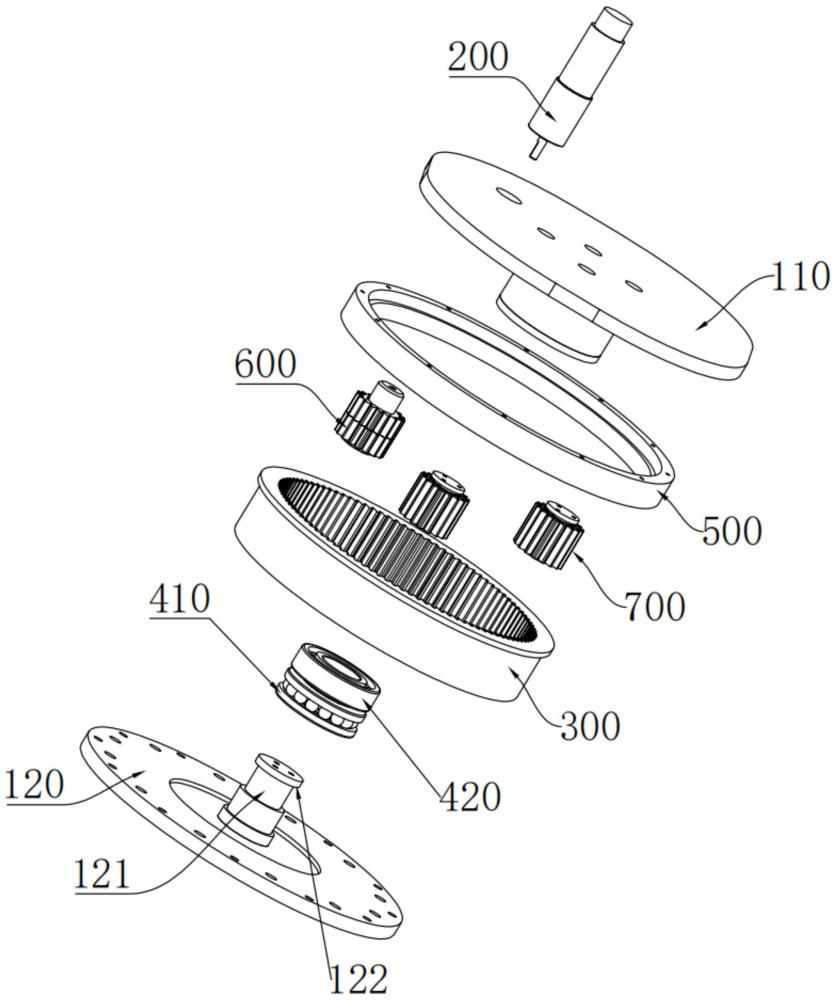
3、本技术提供了一种用于武装打击机器人的回转装置,包括底座以及与底座转动连接的载台,所述载台上固定设有位于底座、载台之间且与底座、载台转动轴线同轴的外齿环;
4、所述底座上固定设有驱动电机,所述驱动电机动力连接设有位于底座、载台之间且与外齿环内环齿面啮合的主动齿件;
5、其中,所述底座靠近载台一侧端面上固定设有套设在外齿环上的密封圈。
6、进一步限定,上述的一种用于武装打击机器人的回转装置,其中,所述外齿环靠近底座一端设有“l”型台阶,所述密封圈套设在外齿环的“l”型台阶上。
7、进一步限定,上述的一种用于武装打击机器人的回转装置,其中,所述底座靠近载台一侧端面上固定设有套筒,所述载台靠近底座一侧端面上固定设有中心轴;
8、其中,所述套筒、中心轴与外齿环同轴,所述中心轴位于套筒内且外圆面与套筒内筒壁之间固定设有轴承组件。
9、进一步限定,上述的一种用于武装打击机器人的回转装置,其中,所述轴承组件包括沿外齿环轴向布置在套筒、中心轴之间的滚子轴承以及推力轴承。
10、进一步限定,上述的一种用于武装打击机器人的回转装置,其中,所述套筒远离底座一侧端面上固定设有与中心轴间隙配合的封盖,和/或所述中心轴远离载台一侧端面上固定设有挡板。
11、进一步限定,上述的一种用于武装打击机器人的回转装置,其中,所述外齿环远离底座一侧端面上设有第一密封槽,所述第一密封槽内嵌设有与载台靠近底座一侧端面抵接的第一嵌圈;
12、和/或所述套筒远离载台一侧端面上设有第二密封槽,所述第二密封槽内嵌设有与底座靠近载台一侧端面抵接的第二嵌圈。
13、进一步限定,上述的一种用于武装打击机器人的回转装置,其中,所述主动齿件包括固定设置在驱动电机动力输出端上的衔接轴、设置在衔接轴上的第一主动齿轮以及第二主动齿轮,所述第一主动齿轮、第二主动齿轮之间固定设有第一扭簧;
14、所述第一主动齿轮、第二主动齿轮分别与衔接轴键连接,所述第一主动齿轮、第二主动齿轮的相对面上其中一个设有回转槽、另一个设有与回转槽嵌接的回转嵌件;
15、其中,所述回转槽的圆心位于衔接轴的中心轴线上,且所述回转槽与回转嵌件之间设有回转间隙,所述回转间隙小于主动齿件与外齿环之间的齿间隙且大于误差间隙。
16、进一步限定,上述的一种用于武装打击机器人的回转装置,其中,所述主动齿件还包括固定设置在衔接轴远离底座一侧端面上的限位部。
17、进一步限定,上述的一种用于武装打击机器人的回转装置,其中,所述底座上还固定连接设有位于底座、载台之间且与外齿环内环齿面啮合连接的至少一个从动齿件;
18、其中,所述从动齿件、主动齿件关于外齿环的中心轴线呈环形阵列布置。
19、进一步限定,上述的一种用于武装打击机器人的回转装置,其中,所述从动齿件包括固定设置在底座上的固定轴、设置在固定轴上的第一从动齿轮以及第二从动齿轮,所述第一从动齿轮、第二从动齿轮之间固定设有第二扭簧;
20、所述第一从动齿轮、第二从动齿轮分别与固定轴轴承转动连接,所述第一从动齿轮、第二从动齿轮的相对面上其中一个设有回转槽、另一个设有与回转槽嵌接的回转嵌件;
21、其中,所述回转槽的圆心位于固定轴的中心轴线上,且所述回转槽与回转嵌件之间设有回转间隙,所述回转间隙小于从动齿件与外齿环之间的齿间隙且大于误差间隙。
22、本发明至少具备以下有益效果:
23、1、当驱动电机驱动主动齿件转动时,主动齿件与外齿环内环齿面配合以带动载台相对底座转动,从而实现回转部件的转动控制,通过调节回转部件的旋转方向和速度能够提高了其机动性和反应能力,同时外齿环与密封圈配合确保了装置内部环境的密封性,防止了水分、液体或其他外部物质进入装置内部,从而保持其内部干燥,维护装置的性能和可靠性,适用于水下或恶劣环境下的军事任务,为军事应用提供了更大的灵活性和可靠性,而且避免了外齿环内部部件的受损风险,减少维护人员的工作量,延长装置的整体使用寿命;
24、2、驱动电机驱动主动齿件转动时带动外齿环跟转,从而带动中心轴相对套筒转动,其中外齿环通过轴承组件与套筒连接,在底座、载台相对转动时能够保证二者的转动平稳性,从而增强回转装置的抗振动和抗冲击性能;
25、3、通过封盖与挡板的配合实现了轴承组件于套筒内的轴向限位,从而在底座相对载台转动时保证二者之间的转动稳定性;
26、4、主动齿件与外齿环传动配合时第一主动齿轮、第二主动齿轮均能够相对衔接轴转动,当第一主动齿轮与第二主动齿轮在误差间隙的作用下相对转动时,第一扭簧积累弹性势能并给予第一主动齿轮、第二主动齿轮克服齿间隙的作用力,从而消除主动齿件与外齿环之间的游隙问题,提高了运动的平稳性和准确性,使回转部件在执行旋转运动时能够更加精确地控制位置和方向,无需担心传动系统引入的误差,同时第一扭簧能够吸收振动和冲击,使机器人在高速行进或激烈运动中能够保持稳定,减小振动对机器人精确性的不利影响,使其更适合执行精确射击和目标追踪任务;
27、5、于从动齿件上设置与主动齿轮类似的减振消隙结构,进一步提高底座、载台相对转动过程的精准度及稳定性,提高回转装置的整体传动效果;
28、6、回转装置结合了减振、消隙和密封功能,通过精密的工程设计,为武装打击机器人提供了多功能的旋转解决方案,不仅提高了机器人在多样化任务中的应用灵活性,使其适用于射击、侦察、监视和目标追踪等任务,而且提高了机器人在复杂环境中的性能和作战效能。
- 还没有人留言评论。精彩留言会获得点赞!