建筑施工用带有延伸功能的可调式机械手结构的制作方法
本发明涉及机械手结构相关,具体为建筑施工用带有延伸功能的可调式机械手结构。
背景技术:
1、在建筑施工中,特别是在对建筑材料进行运输时,需要将大量的建筑材料输送至建筑旁,此时为了提升运输时的安全性,一般采用机械手等方式将材料移动至建筑上,进而方便后续完成对建筑材料的搬运、摆放以及安装等作业。
2、现有授权公开号为cn116197882b的中国专利申请,其公开了一种建筑工程施工用的矩管抓取机械手及其使用方法,包括底座、定位座、延伸架、外壳、反向抓取机构和反向伸缩机构;其中:下滑壳设置于底座的上侧,其表面滑动连接有上滑壳,上滑壳的顶部固定连接有安装座,其与底座之间设置有水平转向机构,通过水平转向机构可水平转动下滑壳的角度;定位座设置于安装座的一侧,其与安装座之间设置有直线伸缩机构;该发明,通过直线伸缩机构可调节定位座的高度和延伸长度,通过多齿夹爪的齿伸入矩管的下侧,使矩管在多齿夹爪阻挡下不会掉落,有效避免矩管掉落导致的工程事故发生,从而可有效确保施工人员的安全。
3、然而,该抓取机械手结构在具体使用时存在以下缺陷:
4、1、现有的抓取机械手结构在对建筑材料进行抓取运输时,会因为抓取材料的重量,导致机械臂抓取材料一端的重量,远远大于机械臂另一端,此时,在后续继续操作以运输建筑材料时,容易导致装置发生翻车或者倾覆,不够安全,而且,过重的材料,也会增加机械臂发生断裂等损伤的概率,影响装置的使用寿命;
5、2、现有的抓取机械手结构在对建筑材料进行抓取运输时,为了方便后续对抓取材料的安装和使用,上述方案中采用水平转向机构和直线伸缩机构,调节抓取材料在水平方向的角度以及竖直方向的位置,但是在实际处于建筑施工的过程中,有时需要对夹持材料的安装和摆放的状态进行调节,此时,上述结构难以实现不同方向和角度的调节,需要人工辅助操作,导致建筑施工的效率变低。
技术实现思路
1、本发明的目的在于提供建筑施工用带有延伸功能的可调式机械手结构,以解决上述背景技术中提出的问题。
2、为实现上述发明目的,本发明采用如下技术方案:
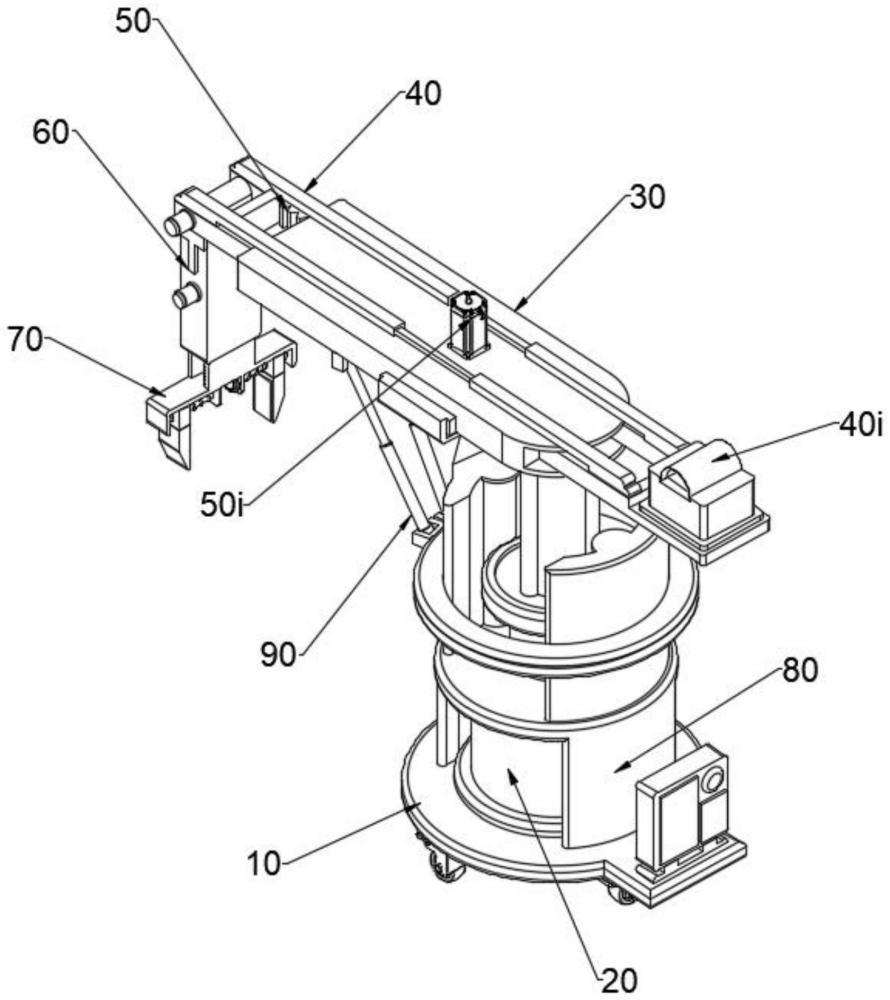
3、本发明提供的建筑施工用带有延伸功能的可调式机械手结构,包括基座、升降旋转机构、升降臂和延伸式机械手,所述基座的顶部安装有升降旋转机构,所述升降旋转机构的顶部连接有升降臂,所述升降臂的内部设置为中空,且连接有所述延伸式机械手,所述延伸式机械手延伸至升降臂的外侧,且对建筑材料进行抓取固定,所述延伸式机械手的顶部设置有配重块,所述延伸式机械手还包括有:
4、齿轮伸缩组件,所述齿轮伸缩组件安装在所述升降臂的内部,且由第一电机进行驱动,所述第一电机安装在升降臂顶部的中心处,所述齿轮伸缩组件延伸至升降臂的外侧,且一侧的顶部支撑有所述配重块;
5、偏转旋转组件,所述偏转旋转组件安装在所述齿轮伸缩组件的另一侧,且由第二电机进行驱动,所述第二电机安装在齿轮伸缩组件的侧面,所述偏转旋转组件的底部设置有机械抓取组件,所述机械抓取组件对建筑材料进行抓取固定。
6、作为本发明的优选方案,所述升降旋转机构由液压升降组件、外支撑组件和水平转动组件构成,所述液压升降组件安装在所述外支撑组件的内侧,所述液压升降组件安装在基座的顶部,所述液压升降组件的顶部支撑有升降臂,所述外支撑组件的顶部偏心处安装有水平转动组件,所述水平转动组件位于液压升降组件的外侧。
7、作为本发明的优选方案,所述齿轮伸缩组件包括有:
8、主轴齿轮,所述主轴齿轮转动连接在所述升降臂的内部,且位于所述升降臂的中心处,所述主轴齿轮和第一电机的输出端连接;
9、齿牙杆,所述齿牙杆啮合连接在所述主轴齿轮的外侧,且设置有两组,所述齿牙杆延伸至升降臂的外部,且与所述升降臂内壁滑动连接;
10、其中,一组所述齿牙杆的侧面安装有支撑座,所述支撑座的顶部设置有配重块,另一组所述齿牙杆的侧面设置有连接座,所述连接座的一侧安装有第二电机,且内部设置有所述偏转旋转组件。
11、作为本发明的优选方案,所述齿牙杆延伸至升降臂外部的一端设置为“u”形,两组所述齿牙杆相对主轴齿轮的中心轴镜像设置,所述齿牙杆的顶部还通过螺钉安装有外定位部件,所述外定位部件滑动连接在导向凸起的顶部,所述导向凸起安装在升降臂的顶部,且位于所述第一电机的侧面;
12、其中,所述外定位部件和导向凸起均设置有两组。
13、作为本发明的优选方案,所述偏转旋转组件包括有:
14、安装座,所述安装座活动连接在所述连接座的内侧,且与所述第二电机的输出端连接,所述安装座的底部安装有外设框架;
15、伺服马达,所述伺服马达安装在所述外设框架的一侧,所述伺服马达的输出端连接有转动齿轮,所述转动齿轮的侧面啮合连接有升降齿牙板;
16、其中,所述升降齿牙板滑动连接在外设框架的内部,且延伸至所述外设框架的底部,所述升降齿牙板的底部安装有机械抓取组件。
17、作为本发明的优选方案,所述转动齿轮转动连接在外设框架的内部,所述升降齿牙板延伸至外设框架外部的一侧设置为“u”形。
18、作为本发明的优选方案,所述机械抓取组件包括有:
19、外部架,所述外部架安装在所述升降齿牙板的侧面,所述外部架的内侧转动连接有导向丝杆,所述导向丝杆活动连接在定位块的内部;
20、其中,所述定位块安装固定在外部架的底部,所述导向丝杆设置有两组,且内部的螺旋滚道方向相反;
21、第一锥形齿轮,所述第一锥形齿轮安装固定在所述导向丝杆的侧面,所述第一锥形齿轮的侧面啮合连接有第二锥形齿轮,所述第二锥形齿轮和第三电机的输出端连接,所述第三电机安装在升降齿牙板顶部的中心处;
22、滑动块,所述滑动块通过滚珠连接在所述导向丝杆的外侧,所述滑动块的底部安装有夹持部件,所述夹持部件对内侧建筑材料进行抓取固定。
23、作为本发明的优选方案,所述液压升降组件包括有:
24、液压缸,所述液压缸安装在所述基座的顶部,所述液压缸的输出端连接有支撑圆盘,所述支撑圆盘的内侧活动连接有支撑杆件,所述支撑杆件的顶部支撑有升降臂;
25、支撑体,所述支撑体安装在所述基座的顶部,所述支撑体的内部设置有液压缸,所述支撑体顶部的偏心处设置有外支撑组件。
26、作为本发明的优选方案,所述外支撑组件包括有:
27、防护架,所述防护架安装在所述支撑体的顶部,所述防护架的内部滑动连接有支撑圆盘,所述防护架的外部中心处安装有外导向架;
28、滑动座,所述滑动座滑动连接在所述外导向架的内部,且延伸至所述外导向架的外部,所述滑动座的内侧转动连接有套筒架,所述套筒架的内侧设置有连接筒;
29、伸缩杆,所述伸缩杆滑动连接在所述连接筒的内部,且延伸至所述连接筒的外部,所述伸缩杆转动连接在定位座的内侧,所述定位座安装在所述升降臂的底部;
30、其中,所述滑动座、套筒架、连接筒、伸缩杆和定位座设置有三组,所述防护架的顶部支撑有水平转动组件。
31、作为本发明的优选方案,所述水平转动组件包括有:
32、电机座,所述电机座安装在所述防护架顶部的一侧,所述电机座的顶部安装有第四电机,所述第四电机的输出端连接有第一传动齿轮;
33、其中,所述第一传动齿轮转动连接在底部座的顶部,所述底部座安装在电机座的顶部;
34、第二传动齿轮,所述第二传动齿轮啮合连接在所述第一传动齿轮的外侧,所述第二传动齿轮和单向凸起滑动连接,所述单向凸起安装在支撑杆件的外部,且呈环形等距设置有三组;
35、其中,所述第二传动齿轮转动连接在底部座的顶部,所述底部座和支撑杆件活动连接。
36、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
37、1、该建筑施工用带有延伸功能的可调式机械手结构,在对建筑施工材料进行搬运、摆放和安装时,为了提升效率以及保证安全性,一般采用机械手抓取后,再进行上述操作,此时,在实际操作时,可通过第一电机带动其输出端主轴齿轮进行旋转的方式,带动齿牙杆、外定位部件、支撑座和连接座进行移动的方式,通过一组齿牙杆进行延伸移动的方式,调节底部机械抓取组件的位置,方便后续对建筑材料的搬运、摆放和安装,同时,机械抓取组件在发生移动时,会同步带动另一组齿牙杆侧面通过支撑座支撑的配重块进行相向移动,对延伸移动的建筑材料进行支撑配重,减少装置发生翻车或者倾覆的概率,进一步提升在对建筑材料进行搬运时的安全性;
38、2、该建筑施工用带有延伸功能的可调式机械手结构,在对建筑材料进行摆放或者安装时,可通过第二电机带动其输出端安装座进行旋转的方式,使得安装座底部安装的外设框架以及机械抓取组件可进行b轴方向的旋转,改变抓取的建筑材料状态(水平或者竖直),进一步提升后续在对建筑材料进行摆放或者安装时的方便性,且无需工作人员辅助操作;
39、3、该建筑施工用带有延伸功能的可调式机械手结构,在对建筑材料进行搬运、抓取、摆放或者安装时,可通过液压缸带动其输出端支撑圆盘和支撑杆件进行移动的方式,带动支撑杆件定位支撑的升降臂进行升降移动,对机械抓取组件在竖直方向上的位置进行调节,满足上述对建筑材料进行搬运、抓取、摆放或者安装的要求,同时,该进行移动的支撑杆件,可通过第四电机带动其输出端第一传动齿轮和第二传动齿轮进行旋转的方式,配合支撑杆件外部设置的单向凸起,使得支撑杆件可进行转动,带动支撑杆件顶部连接的升降臂进行a轴方向的转动,针对不同情况进行调节,提升装置在对建筑材料进行作业时的效果,并且上述支撑杆件的旋转和移动可分别进行(通过支撑圆盘),两者并不冲突,可有效减少装置的占地空间大小,进一步减少了制造成本;
40、4、该建筑施工用带有延伸功能的可调式机械手结构,当对建筑材料进行榨取时,可通过升降臂底部设置的滑动座、套筒架、连接筒、伸缩杆和定位座,配合竖直方向的支撑杆件,构成三角形,此时通过三角形的结构设计,对升降臂进行稳定的支撑,有效提升升降臂对重物的承载能力,延长升降臂的使用寿命,而当升降臂在进行升降移动和旋转时,可分别通过转动连接的滑动座、套筒架、连接筒、伸缩杆和定位座以及上述结构在外导向架内部的周转,彼此配合,保证升降臂在发生运作时,可始终对升降臂进行有效的支撑。
- 还没有人留言评论。精彩留言会获得点赞!