基于任务调度的机器人、巡检方法及相关装置与流程
本技术属于机器人控制,具体涉及一种基于任务调度的机器人、巡检方法及相关装置。
背景技术:
1、为了提高数据中心运维的效率和质量,近年来出现了基于机器人技术的智能巡检方案。智能巡检机器人是一种能够自主导航、识别设备状态、采集环境数据、执行运维任务的智能设备。智能巡检机器人可以根据预设的计划和路线,自动完成巡检任务。
2、但是,现有的智能巡检机器人还存在一些不足之处,主要表现在:智能巡检机器人的巡检策略较为固定,缺乏根据数据中心任务调度情况动态调整的能力;智能巡检机器人的巡检效率受限于机柜的可承载任务量,无法充分利用高负载机柜的处理能力;智能巡检机器人的巡检结果缺乏与任务调度系统的相互反馈,无法实现资源的合理利用和负载均衡。
技术实现思路
1、本技术针对目前数据中心内的智能巡检机器人存在巡检策略固定、巡检效率低、巡检结果缺乏与任务调度系统相互反馈的技术问题,提供一种基于任务调度的机器人、巡检方法及相关装置。
2、为了实现上述目的,本技术采用以下技术方案予以实现:
3、第一方面,本技术提出一种基于任务调度的机器人巡检方法,包括:
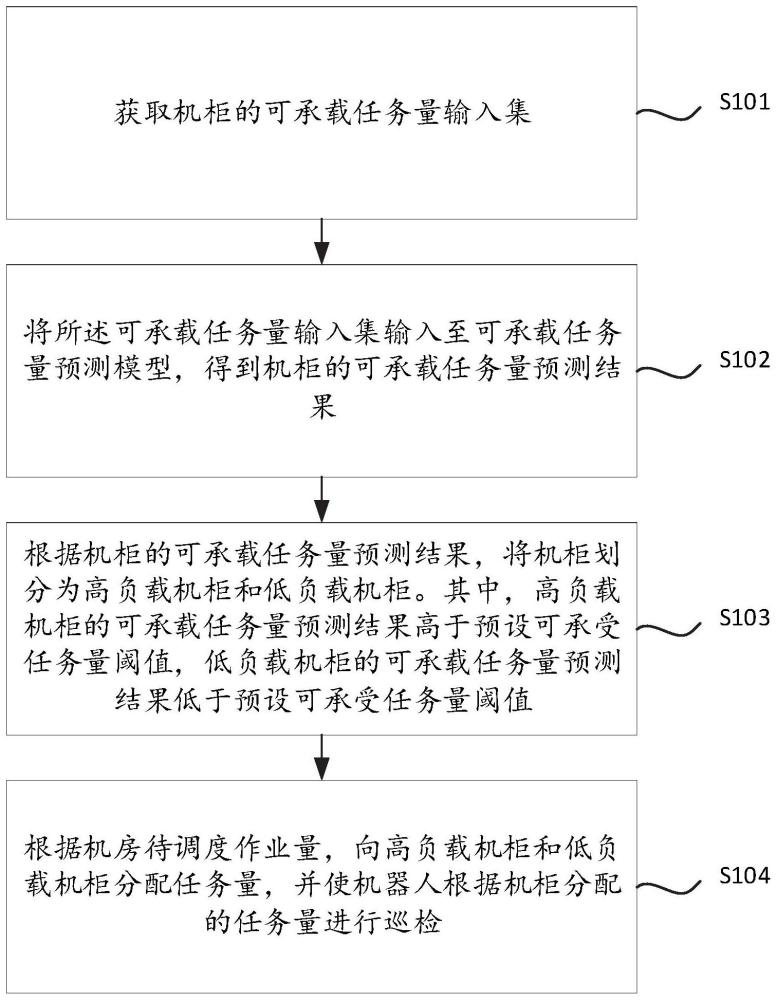
4、获取机柜的可承载任务量输入集;
5、将所述可承载任务量输入集输入至可承载任务量预测模型,得到机柜的可承载任务量预测结果;
6、根据机柜的可承载任务量预测结果,将机柜划分为高负载机柜和低负载机柜;所述高负载机柜的可承载任务量预测结果高于预设可承受任务量阈值,所述低负载机柜的可承载任务量预测结果低于预设可承受任务量阈值;
7、根据机房待调度作业量,向高负载机柜和低负载机柜分配任务量,并使机器人根据机柜分配的任务量进行巡检。
8、优选地,所述可承载任务量输入集,包括:机柜在数据机房中的位置、数据中心cpu利用率、机柜设备系统能耗、历史故障数据和运行温度。
9、优选地,所述预设可承受任务量阈值的确定方法包括:
10、
11、其中,y1为预设可承受任务量阈值,k1为机柜位置权值,w为根据机柜在数据机房中的位置所确定的权值,k2为机柜性能权值,s为根据机柜单位时间处理的数据量所确定的权值,l为根据机柜处理的数据类型的重要程度所确定的权值。
12、优选地,所述根据机房待调度作业量,向高负载机柜和低负载机柜分配任务量,并使机器人根据机柜分配的任务量进行巡检,包括:
13、若机房待调度作业量大于预设调度量上阈值,将机房待调度作业量分配至高负载机柜,若有剩余,将剩余机房待调度作业量分配至高负载机柜周边的低负载机柜;并使机器人依次按照高负载机柜的可承载任务量预测结果从大到小、低负载机柜分配的待调度作业量从大到小进行巡检;
14、若机房待调度作业量小于预设调度量下阈值,将机房待调度作业量分配至高负载机柜;并使机器人依次按照高负载机柜分配的待调度作业量从大到小进行巡检;
15、若机房待调度作业量处于预设调度量上阈值和预设调度量下阈值之间,将机房待调度作业量在高负载机柜和低负载机柜之间平均分配;并使机器人按照全局巡检路线对每个机柜依次进行巡检。
16、优选地,所述数据中心cpu利用率的确定方法,包括:
17、
18、其中,st为时间段t内的数据中心cpu利用率,为数据中心内服务器总数,f为每台服务器的容量,μt为时间段t内的it需求量。
19、优选地,所述机柜设备系统能耗的确定方法,包括:
20、pit,t=mtpidle+(ppeak-pidle)μt/f
21、其中,pit,t为时间段t内的机柜设备系统能耗,mt为时间段t内数据中心内激活的服务器数量,ppeak为服务器的峰值功耗,pidle为服务器空闲时的能耗。
22、优选地,所述可承载任务量输入集,包括:机柜在数据机房中的位置、数据中心cpu利用率、机柜设备系统能耗、运行温度和机柜实时状态数据。
23、第二方面,本技术提出一种基于任务调度的机器人巡检系统,包括:
24、数据获取模块,用于获取机柜的可承载任务量输入集;
25、预测模块,用于将所述可承载任务量输入集输入至可承载任务量预测模型,得到机柜的可承载任务量预测结果;
26、分类模块,用于根据机柜的可承载任务量预测结果,将机柜划分为高负载机柜和低负载机柜;所述高负载机柜的可承载任务量预测结果高于预设可承受任务量阈值,所述低负载机柜的可承载任务量预测结果低于预设可承受任务量阈值;
27、分配模块,用于根据机房待调度作业量,向高负载机柜和低负载机柜分配任务量,并使机器人根据机柜分配的任务量进行巡检。
28、优选地,所述数据获取模块,包括:
29、位置获取模块,用于获取机柜在数据机房中的位置;
30、利用率获取模块,用于获取数据中心cpu利用率;
31、能耗获取模块,用于获取机柜设备系统能耗;
32、故障获取模块,用于获取历史故障数据;
33、温度获取模块,用于获取运行温度。
34、优选地,所述数据获取模块,包括:
35、位置获取模块,用于获取机柜在数据机房中的位置;
36、利用率获取模块,用于获取数据中心cpu利用率;
37、能耗获取模块,用于获取机柜设备系统能耗;
38、传感器模块,用于获取历史故障数据;
39、温度获取模块,用于获取机柜实时状态数据。
40、第三方面,本技术提出一种基于任务调度的机器人,包括机器人本体和用于控制机器人本体运动的控制单元;所述控制单元中存储有计算机程序,所述计算机程序被处理器执行时实现上述基于任务调度的机器人巡检方法的步骤。
41、第四方面,本技术提出一种电子设备,包括:
42、存储器,用于存储计算机程序;
43、处理器,用于执行所述计算机程序时实现上述基于任务调度的机器人巡检方法的步骤。
44、第五方面,本技术提出一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现上述基于任务调度的机器人巡检方法的步骤。
45、与现有技术相比,本技术具有以下有益效果:
46、本技术提出一种基于任务调度的机器人巡检方法,将可承载任务量输入集输入至可承载任务量预测模型,得到机柜的可承载任务量预测结果,再根据机柜的可承载任务量预测结果,将机柜划分为高负载机柜和低负载机柜,最后,根据机房待调度作业量,向高负载机柜和低负载机柜分配任务量,并使机器人根据机柜分配的任务量进行巡检。本技术基于可承载任务量输入集,利用承载任务量预测模型的智能算法预测机柜的可承载任务量,从而实现对机房任务的合理分配和调度,使机器人可以根据机柜的实际负载情况和处理能力进行巡检,避免了资源浪费和负载不均衡,同时,也减少了机器人的移动距离和时间,提高了机器人巡检的效率。另外,本技术根据机房待调度作业量的多少,采用不同的任务分配策略和巡检策略,以适应不同的场景需求,可以使机器人在不同的工作负荷下,进行动态调整和优化,以达到最佳的巡检效果。
47、本技术还提出了一种基于任务调度的机器人巡检系统、基于任务调度的机器人、电子设备和计算机可读存储介质,具备上述基于任务调度的机器人巡检方法的全部优势。
- 还没有人留言评论。精彩留言会获得点赞!