一种基于Miura板材折叠设计的肌腱驱动柔性抓手
本发明属于软体机器人设计领域,具体涉及一种基于miura板材折叠设计的肌腱驱动柔性抓手。
背景技术:
1、传统工业、农业、医疗和其他应用领域中所使用的机器人通常由刚性部件组成。然而,刚性机器人对工作环境的适应性差,使其很难在多样的环境中运行使用。此外,刚性机器人的操作过程中不可避免地存有安全隐患,容易对操作者以及目标对象造成损害。面对刚性机器人的这些缺点,天然具有高环境适应性和人机交互友好的软体机器人便吸引了越来越多的研究和工业关注。
2、折纸(origami)是古老的纸张折叠艺术,指用完整的纸张只通过折叠弯曲,构造空间结构的过程。折纸技术的最新进展导致了可折叠结构领域的巨大飞跃。典型的折叠研究是为了使大型结构便于储存和运输,但通过设计使结构沿预设形态进行折叠变形,可以给结构带来超常规的静力学特性,例如:多模态、可调刚度和负泊松比等。折纸机器人是通过折叠实现形态和功能的一类机器人,它通过折痕的设计实现折展过程中集合形态和功能的变化。这样将折纸与机器人紧密结合的方式成为了折纸领域发展的新方向,也是柔性机器人研究中重要的一个分支。
3、为了解决地图的折叠问题,k.miura在1985年提出了miura折纸结构。(miura,k.(1985).method of packaging and deployment of large membranes in space.)miura折纸结构是一种基本的刚性可平面折叠结构,近年来在建筑和工程设计中得到普遍应用。每个miura折纸结构基础单元由四条相交于一个顶点的折痕组成,其中两条折痕位于单元的中线上,另外两条折痕与水平折痕夹成锐角对称分布。
4、此前所设计的基于折纸结构的抓手为了实现抓持功能,常常涉及到复杂的折痕设计和结构配合,使其在复杂环境和场景下的适应性大大降低。并且,制作抓手本体的材料多为硅胶等化合固化材料,抓手的制作周期较长。这些缺陷使得基于折纸结构的抓手应用受到极大限制。
技术实现思路
1、为解决现有技术中的问题,本发明提出了一种基于miura板材折叠设计的肌腱驱动柔性抓手。本发明的折痕设计加工简单,且抓手主体所用材料为日常生活中随处可见的板形材料。由于折纸结构的可折叠性与特殊的力学性质,可以使用肌腱驱动的方式,组成具备抓取顺应性的软体抓手。本发明的软体抓手由单个舵机驱动控制抓手的张合运动,显著减少了装备质量以及驱动控制复杂性。并且,本发明的绳系布置方式可以有效地将电机输出的旋转运动转化为移动滑台的平行移动,进一步有助于通过折纸结构将张压转变为软体抓手的张合运动。
2、本发明的基于miura板材折叠设计的肌腱驱动柔性抓手包括:驱动输入模块、固定承载平台、滑动平台和miura板材基体;
3、所述的驱动输入模块包括转盘和由转盘带动的传动绳系,传动绳系为闭合路径设计,转盘安装在所述固定承载平台上,其用于接收外部动力输入并带动所述传动绳系运动;
4、所述固定承载平台上设置有导轨,所述滑动平台可滑动地设置在所述导轨上,滑动平台与传动绳系固定连接从而与传动绳系同步运动;
5、所述miura板材基体在完全展开时,其主体部分呈长方形,在主体部分的两长边中心位置处向外各延展设置有一个长方形固定部,其中一个长方形固定部固定设置在所述滑动平台上,另一个固定设置在所述固定承载平台上;当所述滑动平台移动到导轨的一端时,所述miura板材基体完全展开,当所述滑动平台移动到导轨另一端时,所述miura板材基体沿预设折痕线折叠并形成抓握状态;
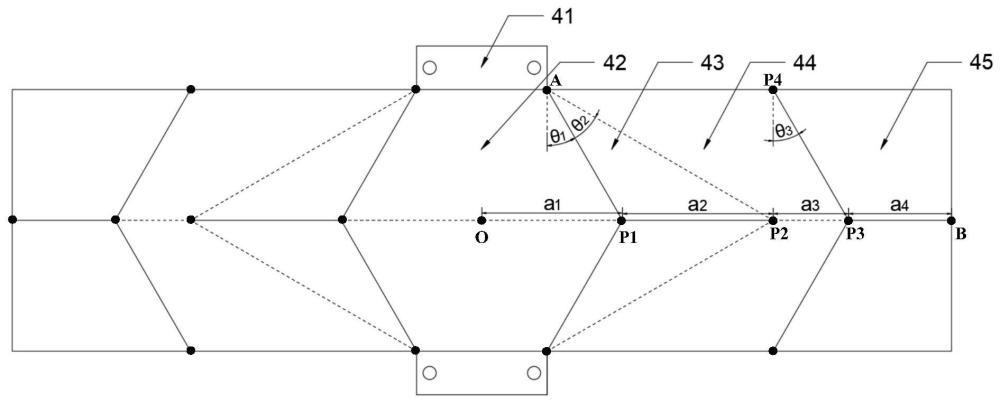
6、所述主体部分的长边长度a=2l,短边长度方形固定部长边长度c=b/2,短边长度d=c/3;长方形固定部的长边与主体部分的长边重合,记重合部分长边的两端点为a;主体部分长边上向短边方向距离a点处选取点p4;
7、记主体部分的中心点为o,主体部分的短边中线与短边交点为b;在ob连线上距离o点处分别选取点p1、p2、p3;
8、主体部分左右两侧的折痕线完全对称,上下两侧的折痕线完全对称;其中,同一侧的a点与p1点由山折痕线连接,a点与p2点由谷折痕线连接,p4点与p3点由山折痕线连接,o点与p1点由谷折痕线连接,p1点与p2点由山折痕线连接,p2点与p3点由谷折痕线连接,p3点与b点由山折痕线连接。
9、作为本发明的优选方案,所述长方形固定部的短边中线上距离两短边边缘c/10处各有一直径为c/10的圆形孔洞,圆形孔洞用于连接滑动平台或固定承载平台。
10、作为本发明的优选方案,所述转盘的圆周上设置有嵌合凹槽,所述传动绳系部分设置在转盘的嵌合凹槽内,转盘的顺时针和逆时针旋转将分别导致传动绳系带动滑动平台在滑轨上后退和前进。
11、作为本发明的优选方案,所述的固定承载平台包括固定端、导轨和远端闭口;固定端和远端闭口分别位于导轨的两端,所述固定承载平台通过固定端与miura板材基体的一个长方形固定部固定连接;远端闭口和固定端上均有贯穿孔洞用于传动绳系穿过。
12、作为本发明的优选方案,所述导轨由上下两块相互平行的导向板组成,所述滑动平台设置在两块导向板之间;所述远端闭口设计有与两块导向板截面形状对应的凹槽,远端闭口通过凹槽与导向板实现镶嵌配合,避免滑动平台滑出轨道。
13、作为本发明的优选方案,所述的滑动平台上有对应导轨形状的凹槽,通过传动绳系传递的动力在导轨上滑动;滑动平台中部有用于传动绳系布置的贯穿孔洞,传动绳系穿过贯穿孔洞并与滑动平台固定连接。
14、作为本发明的优选方案,所述的miura板材基体的材质为普通纸板材料/具备高柔韧性的塑板材料,如:聚丙烯(pp)板、聚乙烯(pe)板、tpu板、pet板等/具备较强柔韧性的金属薄板材料,如铝合金薄板、黄铜薄板等。
15、与现有技术相比,本发明所具有的有益效果有:
16、(1)本发明采用了基于板材的折叠设计,其核心在于利用具有一定刚度的面板材料进行结构构建,对应的折叠设计使得整体的变形得到了灵活且精准的控制。通过设计的折叠模式,可以根据实际应用场景的需求,实现对柔性抓手开合程度及抓取力度等多种参数的调整,从而达到理想的抓取效果。通过基于板材的折叠设计,既保留了一定的柔性以适应多种物体抓取,又具备良好的刚度以维持稳定的抓取姿态,显著提升了抓手在复杂任务中的适应性和精确度。
17、(2)本发明所使用的基于miura的折痕线设计,使得由具有一定刚度的面板所组成的柔性抓手可以从初始的平行展开状态流畅地转换为闭合的夹持状态。在这个过程中,柔性抓手以一种高度可控的方式连续变换形状,因此在任意中间状态下都能够施加适当的夹持力,进而保持对目标抓取物体的良好接触和控制。
18、(3)本发明所使用的基于miura的折痕线设计,充分利用了简洁而高效的几何原理,通过数量有限且均为直线路径的折痕线,实现了复杂的空间折叠和展开功能。相比于曲线折痕设计,本发明所使用的折痕线设计能够在保证结构稳定性和变形可控性的同时,极大地简化制造过程。
19、(4)本发明的miura板材基体所使用材料为普通纸板或具备高柔韧性的塑板、金属薄板等常见且易于获取的材料,既能实现高效的空间展开与紧凑折叠功能,也能确保在折叠与展开过程中保持稳定形态,并能承受一定的载荷。
20、(5)本发明所使用的绳系传动有效地将电机产生的旋转运动转换为滑台的线性平行移动,实现了动力传递和动作转化。当电机驱动轴转动时,带动绳系有序、平稳地收放,进而拉动滑台沿着导轨进行精确且稳定的平移运动。
- 还没有人留言评论。精彩留言会获得点赞!