足式机器人六自由度柔性脊柱及其变刚度阻尼控制方法
本发明涉及机器人,具体涉及一种足式机器人六自由度柔性脊柱及其变刚度阻尼控制方法。
背景技术:
1、磁流变液在磁场下具有磁流变效应,即在外加磁场的作用下,磁流变液能够由流体状态转化为类固体状态,当外加磁场撤销时,又可从类固体状态转变回流体状态,并且这种转化可控可逆,响应速度快,被广泛应用于机械振动、土木工程、航空航天等重要领域。
2、目前,足式机器人具备的适应复杂地形的能力使其在抗灾救援、崎岖路段的物资输送等工况下具有潜在的应用价值。但传统足式机器人多采用刚性脊柱,大幅度降低了其行走过程中的灵活性,并且在不慎跌落或从空中跳下时无法及时调整落地姿态及无法抑制机身惯性引起的足端冲击。
3、随着人们对猎豹、马等动物机身的研究,提出了基于仿生学的各类柔性脊柱,如采用柔性材料的连续性脊柱、多段弹簧的离散式脊柱等。但现有的柔性脊柱在复杂地形下仍无法实现机身刚度与阻尼的自适应,从而导致机器人足端冲击较大。同时,针对于体积较大的足式机器人,机身内部结构复杂,零部件较多,无法保证柔性脊柱的承载能力及灵活性。因此,在设计柔性脊柱时,既要提高足式机器人较强的运动灵活性,以适应复杂的地形,降低足地冲击,也需保证柔性脊柱的承载能力,实现大负载下的机身扭转等多自由度运动。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷中的至少一种而提供一种足式机器人六自由度柔性脊柱及其变刚度阻尼控制方法,通过设计六自由度柔性脊柱,使足式机器人机身结构更加稳定,承载能力强,提高了机身的灵活性以适应复杂地形,同时,高功率比的柔性脊柱提高运动过程中的机动性能,在运动过程中可协助腿部结构实现跳跃等步态;然后,将液压阻尼执行器引入六自由度柔性脊柱,其中,油缸部可以调整柔性脊柱运动姿态,阻尼部可抑制活塞杆的抖动,改善了液压阀控缸系统的欠阻尼问题,提高了柔性脊柱的控制精度,降低了执行器的压力冲击,且通过调整油液压力及阻尼大小,进而调整脊柱的阻尼和刚度,消耗机身运动过程中的惯性能量,抑制机身震动,提高地形适应能力。最后,针对多级流道阻尼器零场阻尼大,磁场利用率不高的问题,设计了带有倒角的导磁环和导磁片,使磁流变液流道间隙均匀分布,不仅可以减小磁流变液在流道间隙内流动时的节流阻尼,而且使通过的内部磁场更加均匀,提高阻尼器的动态可调系数。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明目的之一在于一种足式机器人六自由度柔性脊柱,其应用于足式机器人的机身中,包括:
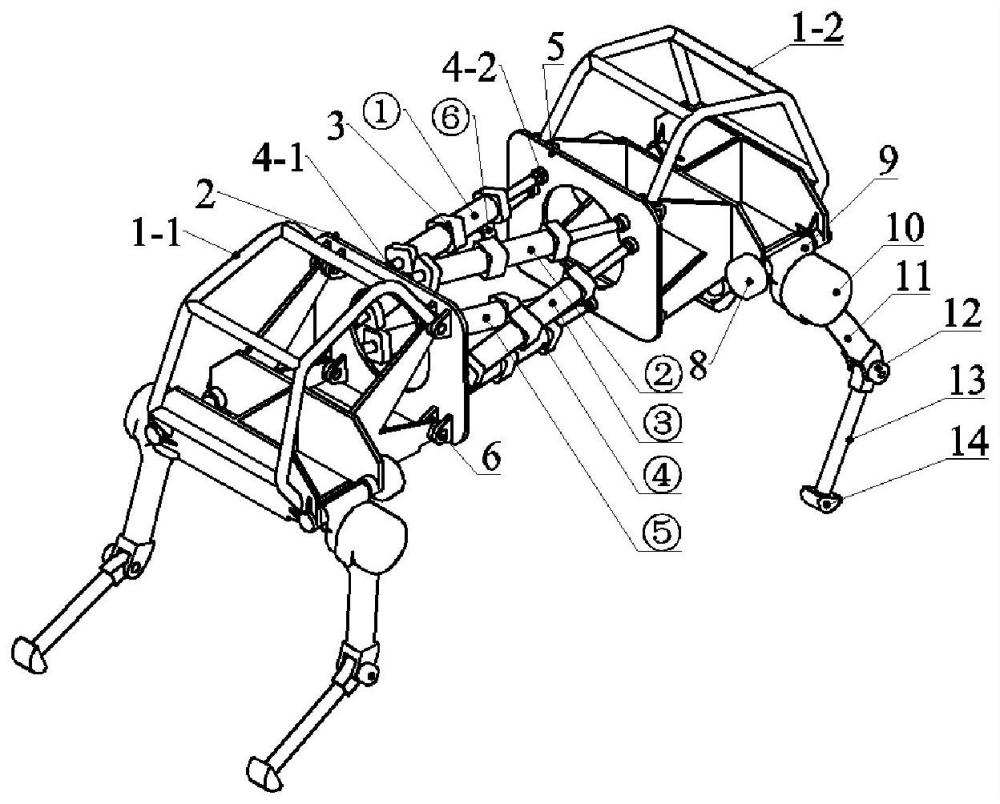
4、前支撑架,设有第一球铰链底座;
5、后支撑架,设有第二球铰链底座;
6、六个液压阻尼执行器,每个液压阻尼执行器的两端分别连接所述第一球铰链底座及第二球铰链底座;每个所述液压阻尼执行器斜置于前支撑架和后支撑架之间,相邻所述液压阻尼执行器镜像对称布置;
7、所述液压阻尼执行器包括相连的油缸执行部和阻尼部,油缸执行部主要实现活塞杆伸出与收缩运动,阻尼部主要是实现对活塞杆运动的阻碍作用。
8、进一步地,所述油缸执行部包括:
9、一端敞开,另一端封闭的缸筒,其首尾侧壁各设有与缸筒筒体内部相连通的油口;
10、第一活塞组、第二活塞组,所述第一活塞组和第二活塞组均包括相连的活塞和活塞杆,所述第一活塞组的活塞杆外壁套有与缸筒固定连接的端盖,所述第二活塞组的活塞杆穿过缸筒的封闭端面,所述第一活塞组和第二活塞组的活塞相抵。
11、进一步地,所述阻尼部包括:
12、阻尼缸筒,其一端与缸筒的封闭端固定连接,另一端设有与其固定连接的阻尼端盖;
13、位于阻尼缸筒内的阻尼活塞,其设于第二活塞组位于阻尼缸筒内活塞杆的端部。
14、进一步地,所述阻尼活塞包括:
15、线圈支架,其外壁设有环形凹槽,内设有多级流道;
16、线圈绕组,其套设于线圈支架的环形凹槽中;
17、导磁套筒,其套设于线圈支架外壁;
18、设于线圈支架两侧的端盖板,其设有与多级流道相连通的流道孔。
19、进一步地,所述多级流道包括第一导磁环、第二导磁环,以及位于第一导磁环、第二导磁环之间的导磁片;
20、所述端盖板包括阻尼活塞左端盖和阻尼活塞右端盖,所述阻尼活塞左端盖与第二导磁环、阻尼活塞右端盖与第一导磁环,以及导磁片与第一导磁环、第二导磁环之间的间隔构成磁流变液流道,磁流变液可在流道内流动。
21、进一步地,所述端盖板朝向线圈支架的一侧设有圆锥体,其上设有弧形过渡;所述导磁片两端设有外倒角;所述导磁环朝向端盖板的一侧设有外倒角,朝向导磁片的一侧设有内倒角;
22、所述弧形过渡与导磁环的外倒角的半径一致,二者间的距离等于磁流变液间隙的宽度;
23、所述导磁片的外倒角与导磁环的内倒角的半径一致,二者间的距离等于磁流变液间隙的宽度。更具体地,所述多级流道主要有导磁环/片组成,嵌于线圈支架内部并有左右阻尼活塞端盖压紧;所述导磁片与导磁环相间分布且两两之间设有磁流变液间隙,磁流变液可在间隙内流动,导磁片两端倒角大小与流道间隙大小相等,所述导磁环一端的内孔设有外倒角,另一端的外环设有外倒角,倒角的半径大小与流道间隙大小相等;所述流道间隙在拐角处仍然保持不变,不仅可以减小磁流变液在流道间隙内流动时的节流阻尼,而且使通过的内部磁场更加均匀;所述左/右端盖设有流道孔,可使阻尼缸筒内部的磁流变液通过流道孔流入多流道内;所述左/右端盖内侧设有一定弧度的圆锥体,弧度半径与留到间隙相等;所述线圈绕组缠绕在线圈支架上,在通入电流时,其可通过阻尼活塞左/右端盖、导磁环/片、导磁套筒形成闭合磁场,磁感线垂直穿过阻尼流道间隙。
24、进一步地,所述液压阻尼执行器的首尾两端分别设有与第一球铰链底座、第二球铰链底座铰接的球头。
25、本发明目的之二在于一种如上所述足式机器人六自由度柔性脊柱的变刚度阻尼控制方法,所述足式机器人的机身包括前躯干、后躯干,以及用于连接二者的六自由度柔性脊柱;所述线圈支架、设于线圈支架内的多级流道和设于线圈支架两侧的端盖板构成磁流变液流道;
26、该变刚度阻尼控制方法包括如下步骤:
27、当足式机器人受到的冲击力通过机身作用于活塞杆,活塞杆带动活塞和阻尼活塞分别在缸筒和阻尼器缸筒内部进行往复运动;
28、首先,通过调节缸筒内活塞两端的油液压差,进而控制活塞在缸筒内的位移目标,实现液压阻尼执行器整体刚度的调节;
29、其次,阻尼活塞运动时,阻尼缸筒内部的磁流变液通过阻尼活塞由一端流入另一端,但当磁流变液流道内部有磁场作用时,流道内部的磁流变液由液态转化成类固态,阻碍了磁流变液从阻尼活塞一端流入另一端,进而阻碍阻尼活塞的运动,实现液压阻尼执行器整体阻尼的调节。
30、本发明目的之三在于一种足式机器人柔性脊柱运动姿态的调整方法,其利用如上所述的足式机器人六自由度柔性脊柱的变刚度阻尼控制方法;
31、所述调整方法包括如下步骤:
32、所述六个液压阻尼执行器按照排列顺序依次标号为①②③④⑤⑥,其中①②、③④、⑤⑥两两相邻,其中,①②位于机身上部,并按照逆时针依次排列,通过调节所述柔性脊柱的六个液压阻尼执行器运动使前支撑架和后支撑架具有相对扭转、摆动、平移等六个自由度;
33、分别同时调节①②、③④、⑤⑥的活塞杆伸出/收缩实现前支撑架和后支撑架的相对上下、左右平移或摆动,进而带动机身平移或摆动,实现足式机器人转向、避障等功能;
34、分别同时调节①③⑤、②④⑥的活塞杆伸出/收缩可实现前支撑架和后支撑架沿轴向相对扭转,进而带动机身扭转,提高机身的灵活性;
35、分别同时调节①②③④⑤⑥的活塞杆伸出/收缩可实现前支撑架和后支撑架相对前后平移,进而带动机身伸长或收缩,使机器人进入狭窄路段或便于运输。
36、进一步地,所述足式机器人跳跃时,所述柔性脊柱上部的两个液压阻尼作动器①②收缩,下部四个液压阻尼作动器③④⑤⑥伸出,通过改变前支撑架和后支撑架之间的角度以增大足式机器人前后腿之间的摆动角度,提高足式机器人的步态长度;在足式机器人跳跃后的着地瞬间,所述柔性脊柱的上方两个液压阻尼作动器①②伸出,下部四个液压阻尼作动器③④⑤⑥收缩,减小足式机器人前后退之间的摆动角度,为下一次跳跃蓄力,进而使柔性脊柱辅助足式机器人完成跳跃运动。
37、进一步地,在足式机器人运动过程中,足端与地面的碰撞冲击力通过前后支撑架传递于柔性脊柱,并作用于液压阻尼执行器,使活塞杆发生抖动并增加液压系统中的压力波动;所述液压阻尼执行器的阻尼部可通过抑制阻尼活塞的运动进而降低活塞杆的抖动和液压系统中的压力波动。
38、进一步的,所述液压阻尼执行器的阻尼部可以通过控制阻尼部使活塞杆保持不动,进而使足式机器人机身保持某一姿态而不需要液压油源的供给。
39、本发明还提供了一种足式机器人,所述足式机器人主要包括前后躯干、六自由度柔性脊柱、腿部结构,所述六自由度柔性脊柱位于前后躯干之间并将其连接共同构成足式机器人的机身;所述前后躯干两侧设有侧摆关节,第一自由度电机安装于前后躯干两侧并驱动侧摆关节转动,所述腿部结构通过侧摆关节与前后躯干连接;所述腿部结构主要包括大腿、小腿、第二自由度电机、第三自由度电机、足端,所述第二自由度电机主要驱动髋关节转动,所述第三自由度电机主要驱动膝关节转动。
40、与现有技术相比,本发明具有以下优点:
41、(1)本发明提供一种足式机器人六自由度柔性脊柱,其实现了前后支撑架相对扭转、摆动、平移等六自由度运动,提高足式机器人机身的灵活性,使足式机器人能够适应各类复杂的地形。
42、(2)本发明提供一种足式机器人六自由度柔性脊柱,其可以改变机身长度,使足式机器人在崎岖路面可以通过增加机身长度的方法以避免侧翻,同时通过缩短机身长度躲避障碍物及便于运输。
43、(3)本发明提供一种足式机器人六自由度柔性脊柱,其提高了机身强度,使机身更加稳定,承载能力更强,同时,液压系统的高功率优点保证了柔性脊柱在大负载下仍能输出更大的功率以满足机身的运动。
44、(4)本发明提供一种足式机器人六自由度柔性脊柱,在柔性脊柱的基础上通过调节六个液压阻尼作动器的协调运动,可以协助足式机器人实现更长的跳跃步态,提高足式机器人运动过程中的机动性能。
45、(5)本发明提供一种足式机器人六自由度柔性脊柱,将液压阻尼执行器引入六自由度柔性脊柱,其中,油缸部可以调整柔性脊柱运动姿态,阻尼部可抑制活塞杆的抖动,改善了液压阀控缸系统的欠阻尼问题,提高了柔性脊柱的控制精度,降低了执行器的压力冲击。
46、(6)本发明提供一种足式机器人六自由度柔性脊柱,面对不同的运动工况,可以通过调整液压阻尼作动器的油液压力及阻尼大小,进而调整柔性脊柱的阻尼和刚度,以消耗机身运动过程中的惯性能量,抑制机身震动,提高地形适应能力。
47、(7)本发明提供一种足式机器人六自由度柔性脊柱,在特定工况下,可以通过控制磁流变阻尼器直接使柔性脊柱保持某一固定姿态,无需液压油源的干预,从而降低了由液压系统持续功能而产生的能耗。
48、(8)本发明提供一种足式机器人六自由度柔性脊柱,针对多级流道阻尼器零场阻尼大,磁场利用率不高的问题,设计了带有倒角的导磁环和导磁片,使磁流变液流道间隙均匀分布,不仅可以减小磁流变液在流道间隙内流动时的节流阻尼,而且使通过的内部磁场更加均匀,提高阻尼器的动态可调系数。
- 还没有人留言评论。精彩留言会获得点赞!