一种仿鸟类臂爪的欠驱动抓握机械臂机构
本发明涉及仿生机器人,尤其是涉及一种仿鸟类臂爪的欠驱动抓握机械臂机构。
背景技术:
1、机器人手爪既是一个主动感知工作环境信息的感知器,又是机器人末端的执行器,是一个高度集成的、具有多种感知功能和智能化的机电系统,涉及多个研究领域和交叉学科。随着机器人技术研发的不断深入,各种功能的机器人层出不穷,机器人的应用范围也在不断扩大。机器人不仅能够大幅提高工人的工作效率,还可以代替人类从事一些高危的工作,日益受到重视。同时随着灾难救援、太空探索、军事侦察等任务和需求的提出,人们对于机器人的性能要求越来越高。生物体为了更好地适应不同的外部自然环境,逐步进化出非常精细和复杂的运动机构和运动模式。人们基于模仿自然界中生物体的运动过程,仿生机器人应运而出。
2、生物力学的相关研究表明,鸟类的模式化着陆行为遵循着一种基于碰撞时间的引导策略,即鸟类在着陆时会根据当前的飞行速度做出一系列的调整动作来控制与接触面的碰撞,如身体上仰、伸展肢体和足趾,接触到树枝时时肢体折叠并缓冲,足趾通过包裹挤压接触面来增大抓力,调整身体以维持平衡。国内外众多非结构化测试实验展示了栖息式机器人在丛林中的优势。通过加载各种传感器模块,具有仿鸟爪结构的空中机器人能够广泛应用于丛林环境中,可用于收集野外气象环境、动植物样本等数据。此外,还能完成野外搜救、森林火灾预警等特种任务。得益于其强大的树栖能力,该机器人能够栖息在树枝上,从而大大节省电池电量。并且可在栖息时通过太阳能充电,有效解决传统无人机续航问题。由于该研究的仿生属性,该机器人还可以反过来用于鸟类生物学的研究,减少对活体动物的伤害。目前,对机器人的抓取或栖息的研究大多只是针对小部分特定的场景或特殊的表面,无法广泛用于非结构化环境。
3、cn202211113536.5公开了一种栖息式机器人及栖息式机器人的栖息方法,该栖息式机器人涉及机器人技术领域,包括:机体、控制单元、栖息模块及数据采集单元;控制单元设置在机体内,栖息模块及数据采集单元均设置在机体上,栖息模块和数据采集单元均与控制单元电连接;栖息模块包括至少一个栖息腿和至少一个栖息爪;栖息腿分别与栖息爪和机体连接;数据采集单元用于采集目标区域内的目标数据;控制单元用于基于目标区域的图像、点云数据及导航数据,控制栖息式机器人飞行至栖息目标,并控制调整至少一个栖息腿和至少一个栖息爪的状态,以调整栖息式机器人在栖息目标上的栖息位姿,完成栖息动作。cn202110443133.6公开了一种用于飞行机器人的机械臂及飞行机器人,其中机械臂包括连接组件;上臂连杆,一端与连接组件铰接;下臂连杆,一端与上臂连杆另一端铰接;上臂舵机,用于驱动上臂连杆摆动;下臂舵机,用于驱动下臂连杆相对上臂连杆摆动;夹爪组件,安装在下臂连杆另一端上,用于抓取目标;下臂舵机通过连杆组件驱动下臂连杆运动。但是上述专利公开的技术方案无法实现具有强大抓力、抓取可靠、抓取范围大、控制简单的技术效果。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种仿鸟类臂爪的欠驱动抓握机械臂机构,以欠驱动方式来实现无动力关节和爪指对被抓物体形状的被动自适应和抓握,可将爪指抓握栖息物时的瞬间撞击能量,通过快速释放装置,被动转化为强大抓握力,具有驱动源少、控制简单、抓握力大、抓取范围大的优点;其中棘轮锁定机构能有效防止回弹,确保抓取可靠。
2、本发明的目的可以通过以下技术方案来实现:
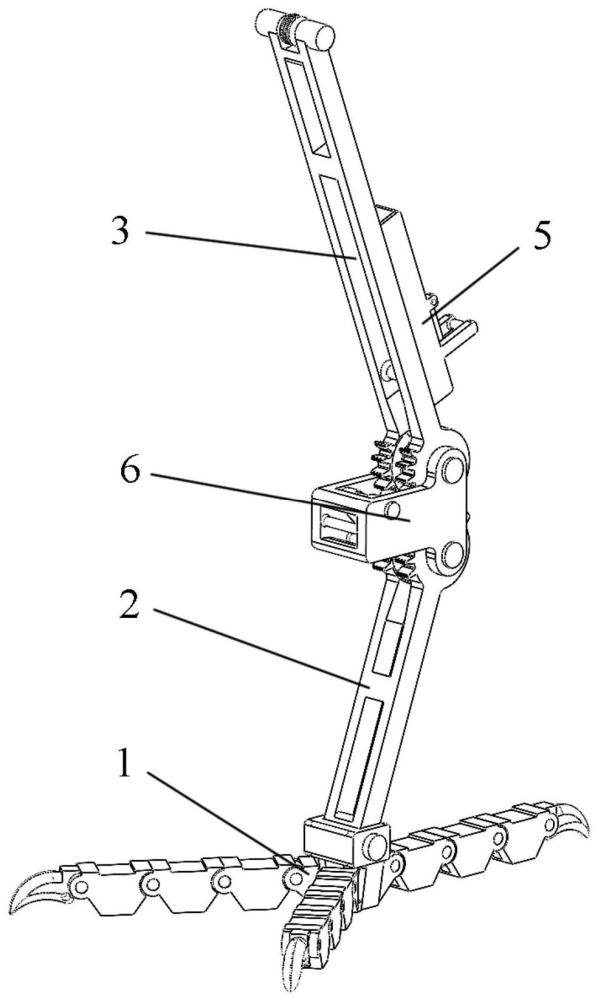
3、本发明提供一种仿鸟类臂爪的欠驱动抓握机械臂机构,包括:包括爪子、下臂、上臂、驱动系统、快速释放装置、棘轮锁定机构,爪子、下臂、棘轮锁定机构、上臂依次连接,快速释放装置设于上臂上;
4、爪子包括:爪座、爪指,爪座的底部与爪指连接,爪座的顶部与下臂连接;
5、棘轮锁定机构包括:齿轮、棘爪、弹力绳和固定机架,棘爪上设有第一销轴,齿轮的中轴线上设有第二销轴;棘爪设于固定机架上;第一销轴和第二销轴之间设有弹力绳;弹力绳用于提供使棘爪锁定在齿轮上的力。进一步的,棘爪通过铰链安装在固定机架上,位于齿轮附近;
6、驱动系统包括:主肌腱、副肌腱、快速释放肌腱、棘轮锁定肌腱、上臂弹簧、下臂弹簧和驱动电机;驱动电机设于上臂的上端;主肌腱的一端通过上臂弹簧缠绕于驱动电机上,主肌腱的另一端穿过快速释放装置,绕过上臂和下臂连接处后,通过下臂弹簧,在爪座处分为多根与爪指连接;副肌腱一端缠绕于驱动电机上,缠绕方向与主肌腱相反,另一端绕过上臂后连接在主肌腱上,连接处为点a,点a位于快速释放装置附近位置;快速释放肌腱一端连接于快速释放装置的限位块上,另一端绕过快速释放装置的第三销轴后连接于主肌腱上,连接处为点b,点b位于下臂附近位置;棘轮锁定肌腱一端连接于棘爪上,另一端连接于副肌腱上,连接处为点c,点c位于靠近驱动电机的部分;
7、快速释放装置包括:滑块、限位块、第三销轴和滑槽;滑块穿设于主肌腱上,能随主肌腱在滑槽内移动;;限位块设于滑槽外侧。快速释放肌腱绕过第三销轴后连接在限位块上以控制滑块的运动。当快速释放肌腱产生足够的拉力拉开限位块,上臂弹簧中所储存的能量便会转化为滑块的动能使其沿滑槽滑动。
8、进一步的,爪座的底部通过铰链副与爪指连接,爪座的顶部通过铰链副与下臂连接。
9、进一步的,爪指设有三个。
10、进一步的,爪指包括多个依次连接的指骨。
11、进一步的,多个指骨通过铰链连接。
12、进一步的,爪指还包括爪尖,爪尖和指骨连接,爪尖设于爪指的末端。爪指工作时,主肌腱受到来自上臂的拉力,依次拉动爪尖和指骨进行弯折,最终三根爪指都向内弯折达到抓取物体的姿态。
13、进一步的,指骨为等腰梯形指骨。
14、进一步的,铰链的上端设有挡板,挡板用于防止爪指反向弯曲。
15、进一步的,驱动电机设于上臂的上端铰链处。上臂的上端铰链用于与外部机械结构相连。
16、进一步的,齿轮设有两对,两对齿轮中间通过第二销轴连接。
17、进一步的,齿轮上设有凸起,以防止臂、下臂反折。
18、进一步的,上臂、下臂均为镂空结构,以减少整体的重量。
19、工作原理如下:
20、当臂爪处于空闲工况时,主肌腱在快速释放装置以上的部分、副肌腱和棘轮锁定肌腱为绷紧状态,主肌腱在快速释放装置以下的部分和快速释放肌腱为松弛状态。
21、当臂爪抓握、撞击被抓物体时,上臂和下臂受冲击力影响开始折叠,从而拉紧主肌腱在快速释放装置以下的部分,使爪子的三根爪指绕其关节弯折以产生抓握力,同时也在缓慢拉紧快速释放肌腱;此时驱动电机开始正转,在拉紧主肌腱为快速释放装置积攒势能的同时放松副肌腱和棘轮锁定肌腱;随着上臂和下臂折叠幅度的增大,各肌腱被持续的拉紧与放松,快速释放装置首先被触发,释放被限位块锁定的滑块,将驱动电机先前储存的能量沿着主肌腱高速释放到爪指,产生更大的抓握力;随着棘轮锁定肌腱的放松,棘轮锁定机构被触发,棘爪锁定齿轮,以防止回弹,确保抓取可靠;此时主肌腱在快速释放装置以上的部分、副肌腱和棘轮锁定肌腱为松弛状态,主肌腱在快速释放装置以下的部分和快速释放肌腱为绷紧状态。
22、当臂爪松开被抓物体时,驱动电机反转,拉紧副肌腱,从而拉紧棘轮锁定肌腱使棘轮锁定机构解锁,此时上臂和下臂开始打开;随着副肌腱的拉紧,快速释放装置的滑块被逐渐拉回到初始位置,被限位块锁定;与此同时上臂、下臂和爪子完全展开,驱动电机停止转动。
23、与现有技术相比,本发明具有以下优点:
24、本发明以欠驱动方式来实现无动力关节和爪指对被抓物体形状的被动自适应和抓握,可将爪指抓握栖息物时的瞬间撞击能量,通过快速释放装置,被动转化为强大抓握力,具有驱动源少、控制简单、抓握力大、抓取范围大的优点;其中棘轮锁定机构能有效防止回弹,确保抓取可靠。
- 还没有人留言评论。精彩留言会获得点赞!