气溶胶检测机器人及其控制方法
本发明涉及气体检测,特别涉及一种气溶胶检测机器人及其控制方法。
背景技术:
1、气溶胶是指悬浮在气体介质中的固态或液态颗粒所组成的气态分散系统,同时气溶胶中还会携带一些病原体、有害物质。长期工作或生活在含有大量气溶胶的环境中,可能会导致人体出现呼吸道和消化道感染的情况发生,并且含有病原体和有害物质的气溶胶会通过人打喷嚏、咳嗽在空气中传播,因此需要对医院、办公室、公共交通工具等这些人流量较大的场所,进行气溶胶的检测。
2、现有的气溶胶检测主要是通过固定式的气溶胶检测设备实现,即气溶胶检测设备固定在特定的位置,以采集气溶胶样本并进行成分分析,识别气溶胶内是否含有病毒或其他有害物质。但是这种固定式的气溶胶检测设备只能在固定的位置进行监测,无法动态的追踪气溶胶的传播路径,无法准确的反应出环境中其他位置的空气质量,导致气溶胶检测设备对空气质量检测准确性较低。
技术实现思路
1、本发明的主要目的是提供一种气溶胶检测机器人,旨在解决现有气溶胶检测设备无法动态追踪气溶胶传播路径,无法准确反应出环境中空气质量的问题。
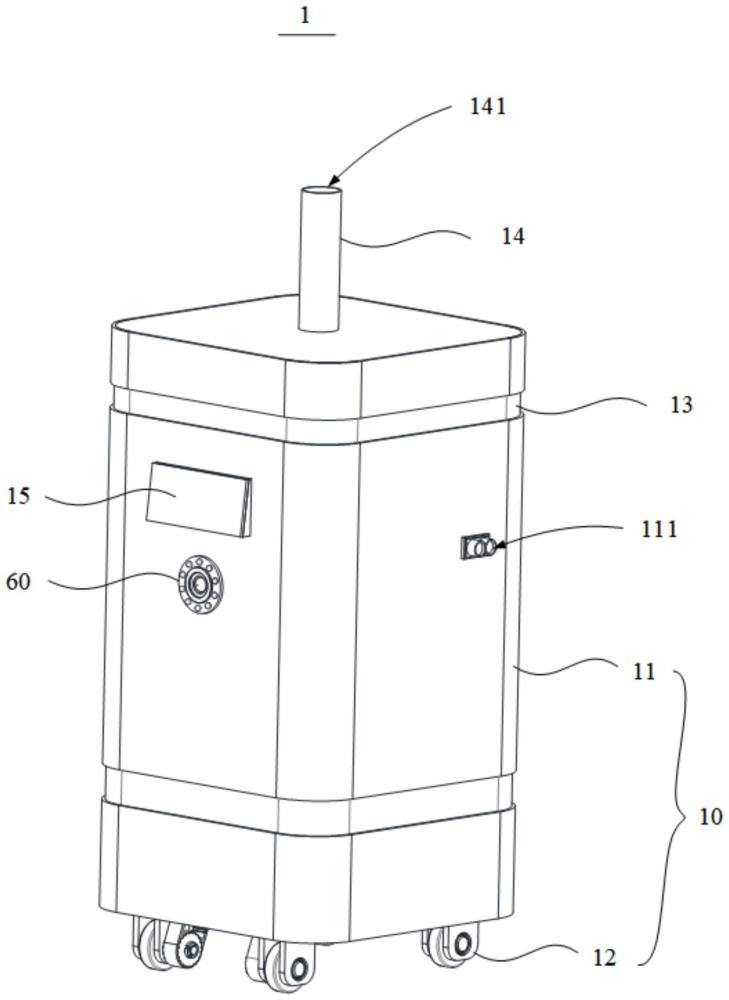
2、为实现上述目的,本发明提出的气溶胶检测机器人,包括机器人主体、运动机构、气溶胶检测模块、成分分析模块以及控制单元;所述机器人主体包括壳体和转动件,所述壳体形成有进气口,所述转动件活动设于壳体外侧;所述运动机构设于所述壳体内,并与所述转动件驱动连接,所述运动机构驱动所述转动件转动,以使所述机器人本体移动;所述气溶胶检测模块设于所述壳体内,所述气溶胶检测模块用于检测环境中的气溶胶浓度并预测所述气溶胶的传播路径;所述成分分析模块设于所述壳体内,并通过所述进气口与外界空气连通,所述成分分析模块用于所述气溶胶的成分分析;所述控制单元设于所述壳体内,并与所述气溶胶检测模块、所述运动机构以及所述成分分析模块均通讯连接,所述控制单元接收所述气溶胶检测模块预判的所述气溶胶传播路径,并控制所述运动机构沿所述气溶胶传播路径移动。
3、在本发明的一实施例中,所述气溶胶检测机器人还包括视觉模块,所述视觉模块设于所述壳体内,并显露于所述壳体,所述视觉模块与所述控制单元通讯连接,用于检测环境中的障碍物,所述控制单元根据所述视觉模块的检测结果控制所述运动机构避开所述障碍物。
4、在本发明的一实施例中,所述气溶胶检测模块包括光学测量件,所述壳体设有出光口,所述光学测量件通过所述出光口测量环境中所述气溶胶的浓度。
5、在本发明的一实施例中,所述气溶胶检测模块还包括预测计算模块,所述视觉模块与所述预测计算模块通讯连接,所述视觉模块还用于检测人体的坐标、移动方向以及速度,并将检测数据输出至所述预测计算模块,所述预测计算模块用于预测模拟并优化所述气溶胶的传播路径。
6、在本发明的一实施例中,所述气流在空间中的速度、方向和浓度关系的计算公式具体为:
7、
8、其中,ureal为大地参考系下呼出气流的轴心速度,k0为实验所得常数项,α为紊流系数0.076,dm为出口气流速度,u0为空气在头部绕流速度,s为射流路程,j为温差引起的浮力。
9、在本发明的一实施例中,所述成分分析模块为质谱分析仪,所述质谱分析仪用于通过所述进气口实时收集所述气溶胶的检测样本,并自动检测所述气溶胶检测样本中的有害物质。
10、在本发明的一实施例中,所述气溶胶检测机器人还包括净化器,所述壳体背向所述转动件的一端设有气管,所述净化器设于所述壳体内,并与所述气管连通,所述净化器的净化气体通过所述气管排放至外界空气中,以净化所述气溶胶中的有害物质。
11、本发明还提出一种气溶胶检测机器人的控制方法,所述气溶胶检测机器人为上述任一所述的气溶胶检测机器人,所述控制方法包括步骤:
12、控制单元控制所述气溶胶检测模块预测所述气溶胶的传播路径,并接收所述气溶胶的传播路径数据;
13、控制单元控制所述运动机构沿所述气溶胶的传播路径移动;
14、控制单元控制所述成分分析模块在所述气溶胶的传播路径上进行所述气溶胶的成分分析,并将分析结果传递至所述控制单元;
15、所述控制单元控制所述气溶胶检测机器人的净化器净化所述气溶胶中的有害物质。
16、在本发明的一实施例中,在控制单元控制所述气溶胶检测模块预测所述气溶胶的传播路径,并接收所述气溶胶的传播路径数据的步骤中:
17、所述气溶胶检测机器人的视觉模块采集人位置坐标、脸部以及嘴型变化特征,并所述特征数据传递至所述气溶胶检测模块;
18、所述气溶胶检测模块中的预测计算模块接收所述特征数据,并通过气流在空间中的速度、方向和浓度关系的计算公式,模拟出人呼出气溶胶的传播路径;
19、所述气溶胶检测模块中的光学测量件实时测量所述气溶胶的传播路径上气溶胶的浓度,并与所述计算公式计算出的浓度进行对比,以修正所述气溶胶的传播路径;
20、且/或,所述气溶胶检测机器人的视觉模块检测所述气溶胶传播路径上是否有障碍物;
21、若有,则将所述障碍物的坐标信息传递至所述控制单元,以修正所述运动机构的移动路径。
22、在本发明的一实施例中,在所述控制单元控制所述气溶胶检测机器人的净化器吸收并净化所述气溶胶中的有害物质的步骤中:
23、所述控制单元接收所述成分分析模块对所述气溶胶的成分分析结果,并判断所述气溶胶中是否包括有害物质;
24、若所述气溶胶中含有有害物质,所述控制单元控制所述净化器喷出净化气体,以净化所述气溶胶内的有害物质;
25、控制单元控制所述成分分析模块对净化后的所述气溶胶再次进行成分分析,以判断所述气溶胶中是否还包括有害物质;
26、若有,则所述控制单元控制所述净化器再次净化所述气溶胶;
27、若无,则所述控制单元驱动所述运动机构沿所述气溶胶的传播路径移动,并控制所述成分分析模块对所述气溶胶传播路径上的其他位置进行成分分析。
28、本发明技术方案提出的气溶胶检测机器人包括机器人主体、运动机构、气溶胶检测模块、成分分析模块以及控制单元。其中机器人主体包括壳体和设于壳体外侧的转动件,将运动机构、气溶胶检测模块、成分分析模块以及控制单元均设置在壳体内,并将运动机构与转动件驱动连接,以驱动机器人本体移动。气溶胶检测模块用于对空气中的气溶胶浓度进行检测,并可通过计算模型对气溶胶的传播路径进行预测。然后再将控制单元与运动机构和气溶胶检测模块均通讯连接,通过将气溶胶检测模块预测的气溶胶传播路径数据传递至控制单元,控制单元控制运动机构驱动机器人本体沿气溶胶传播路径进行移动,进而实现了动态追踪气溶胶传播的目的。同时成分分析模块通过采集气溶胶样本,并对气溶胶样本进行实时检测,以实现对气溶胶成分在空间和时间上的动态检测和分析,以准确的反应出不同位置的空气质量。本技术解决了现有气溶胶检测设备无法动态追踪气溶胶传播路径以及无法准确反应出环境中空气质量的问题,提高了空气质量监测的准确性和效率。
- 还没有人留言评论。精彩留言会获得点赞!