一种压电关节机械臂及其工作方法
本发明涉及特种工环境作业的机器人关节领域,尤其涉及一种基于压电驱动进行关节机械臂展开和闭合的装置及方法。
背景技术:
1、机械臂关节模块通常通过电机和液压驱动,来实现关节模块以及整个机械臂的运动。随着机械臂在科研领域应用范围的不断扩大,一些特殊的工作场合对关节模块的驱动技术提出了更高的要求,如不受强磁场干扰、真空环境作业、微型结构等。电磁电机在强磁场环境中无法正常工作,液压驱动无法在真空环境下有效工作,且这两种作动方式都存在机构冗余不利于小型化。基于逆压电效应的压电驱动方式在压电陶瓷材料的制备和加工技术得到了进一步发展的情况下,可实现驱动结构的结构紧凑、直接驱动、无电磁干扰、易于小型化等特点,在极端工作环境中具有广泛的应用前景。
技术实现思路
1、本发明所要解决的技术问题是针对背景技术中所涉及到的问题,提供一种压电关节机械臂及其工作方法。
2、本发明为解决上述技术问题采用以下技术方案:
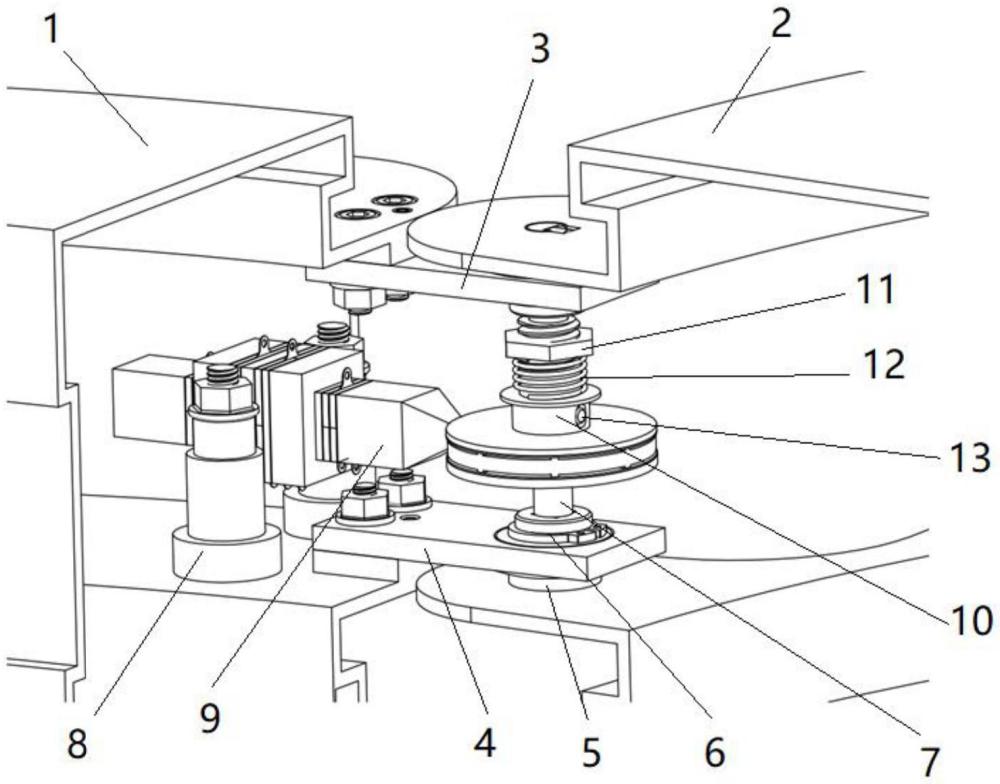
3、一种压电关节机械臂,包括m个关节臂和m-1个连接组件;
4、所述连接组件包含第一至第二连接板、第一至第二轴承、中心轴、压电作动器、以及预紧机构;
5、所述压电作动器包括定子、第一转子和第二转子;
6、所述定子包括压电复合梁和驱动圆环;
7、所述驱动圆环呈圆环状且两侧端面上均周向均匀设有k个驱动齿,且两侧端面上的驱动齿一一对称,k为大于等于3的自然数;
8、所述压电复合梁包含变幅梁、前梁、后梁、第一连接梁、第二连接梁、扭振模块、弯振模块和预紧螺栓;
9、所述扭振模块包含夹持片、以及第一至第四扭振压电陶瓷片;
10、所述第一至第四扭振压电陶瓷片结构相同,呈正方形,中心设有用于和所述预紧螺栓相配合的通孔,均包含两个扭振单元;所述两个扭振单元的分界线经过扭振压电陶瓷片的中心且平行于扭振压电陶瓷片的一边,沿分界线方向极化且极化方向相反;
11、所述夹持片和第一扭振压电陶瓷片形状相同,中心设有和所述预紧螺栓相配合的通孔,两侧对称设有用于和外界固连的耳片;
12、第一扭振压电陶瓷片、第二扭振压电陶瓷片、夹持片、第三扭振压电陶瓷片、第四扭振压电陶瓷片依次层叠,第一、第四扭振压电陶瓷片的分界线共面且极化方向相反,第二、第三扭振压电陶瓷片的分界线共面且极化方向相反,第一、第二扭振压电陶瓷片的分界线相互垂直;
13、所述弯振模块包含第一至第四弯振压电陶瓷片;
14、所述第一至第四弯振压电陶瓷片结构相同,呈正方形,面积小于等于第一扭振压电陶瓷片,中心设有用于和所述预紧螺栓相配合的通孔,均采用双分区压电陶瓷片;两个分区的分界线经过弯振压电陶瓷片的中心且平行于弯振压电陶瓷片的一边,沿厚度方向极化且极化方向相反;
15、第一弯振压电陶瓷片、第二弯振压电陶瓷片层叠形成第一弯振单元,第三弯振压电陶瓷片、第四弯振压电陶瓷片层叠形成第二弯振单元,第一至第四弯振压电陶瓷片分界线共面,第一、第二弯振压电陶瓷片极化方向相反,第三、第四弯振压电陶瓷片极化方向相反,第二、第三弯振压电陶瓷片极化方向相同;
16、所述变幅梁为正四棱台,其面积较大的一端端面形状和第一扭振压电陶瓷片形状相同,面积较小的一端和所述驱动圆环的侧壁固连,变幅梁的轴线经过驱动圆环的中心,且驱动圆环的轴线平行于变幅梁面积较大的一端端面的一条边长;
17、所述前梁、后梁结构均为横截面和第一弯振压电陶瓷片形状相同的正四棱柱,其中,后梁沿轴线设有用于和所述预紧螺栓相配合的通孔;前梁一端设有用于和所述预紧螺栓相配合的螺纹盲孔,另一端和所述变幅梁面积较大的一端对应同轴固连;
18、所述第一连接梁、第二连接梁结构相同,均包含第一连接部和第二连接部,其中,第一连接部为横截面和第一弯振压电陶瓷片形状相同的正四棱柱,第二连接部为横截面和第一扭振压电陶瓷片形状相同的正四棱柱,第一连接部、第二连接部同轴固连且沿轴线均设有用于和所述预紧螺栓相配合的通孔;
19、所述预紧螺栓依次穿过后梁、第一弯振单元、第一连接梁的第一连接部、第一连接梁的第二连接部、扭振模块、第二连接梁的第二连接部、第二连接梁的第一连接部、第二弯振单元后和前梁上的螺纹盲孔螺纹相连,将第一弯振单元、第一连接梁、扭振模块、第二连接梁、第二弯振单元、前梁夹紧在后梁和前梁之间,使得第一弯振单元、第二弯振单元位于压电复合梁的弯曲振动的波峰或波谷处,扭振模块位于压电复合梁的扭转振动的节点处;
20、所述压电复合梁用于输出弯曲振动或扭转振动激励出驱动圆环的面外弯曲振动,所述驱动圆环两侧端面上的驱动齿均不在面外弯曲振动的波峰、波谷或节点上;
21、所述第一转子、第二转子结构相同,呈圆环状,对称设置在驱动圆环两侧,分别和驱动圆环两侧端面上的驱动齿相抵;
22、所述关节臂一端设有第一固定座、第二固定座,另一端设有第一安装座、第二安装座;m个关节臂通过m-1个连接组件依次相连;
23、令连接组件两端的关节臂分别为第一关节臂、第二关节臂;
24、所述中心轴一端和第二关节臂的第一安装座固连,另一端和第二关节臂的第二安装座固连;第一轴承套在第二关节臂的第一安装座上,内圈和第二关节臂的第一安装座固连;第二轴承套在第二关节臂的第二安装座上,内圈和第二关节臂的第二安装座固连;第一轴承、第二轴承、中心轴同轴;
25、第一连接板、第二连接板平行设置,一端均和第一关节臂设有第一固定座的一端固连,另一端均设有安装孔;第一连接板通过其安装孔和所述第一轴承的外圈固连,第二连接板通过其安装孔和所述第二轴承的外圈固连,使得第一关节臂、第二关节臂能够绕中心轴相对转动;
26、所述压电作动器的夹持片两侧的耳片分别和第一关节臂的第一固定座、第二固定座固连,使得驱动圆环、第一转子、第二转子均套在所述中心轴外且和中心轴同轴;
27、所述预紧机构包含调节螺母、预紧弹簧、第一连接件、第二连接件和销钉;
28、所述第二连接件包含第二连接盘和第二套筒,其中,所述第二连接盘为中心设有通孔的圆盘,第二套筒为两端开口的空心圆柱体;所述第二套筒一端和第二连接盘的内壁同轴固连,另一端外壁上设有用于和所述调节螺母相配合的螺纹;
29、所述第二连接件套在所述中心轴外,第二连接盘的外壁和第二转子的内壁同轴固连,第二套筒设有螺纹的一端依次穿过驱动圆环、第一转子,且第二套筒和中心轴间隙配合,能够沿轴向相对中心轴自由滑动;
30、所述第一连接件包含第一连接盘、第一套筒和预紧盘,其中,所述第一套筒为两端开口的空心圆柱体,第一连接盘、预紧盘均为中心设有通孔的圆盘;所述第一套筒一端和第一连接盘的内壁同轴固连,另一端和所述预紧盘的内壁同轴固连;
31、所述第一连接件套在所述第二套筒外,第一连接盘的外壁和第一转子的内壁同轴固连;第一套筒和第二套筒间隙配合,能够沿轴向相对中心轴自由滑动;第一转子位于第二转子、预紧盘之间;
32、所述调节螺母和所述第二套筒设有螺纹的一端螺纹相连;所述预紧弹簧套在第二套筒上,一端和所述调节螺母相抵,另一端和所述预紧盘相抵,呈压缩状态;
33、所述调节螺母用于调节第一转子、第二转子和驱动圆环两侧驱动齿之间的预压力;
34、所述第一套筒、第二套筒、中心轴上均对应设有平行于中心轴轴线、用于和所述销钉相配合的通槽;
35、所述销钉平行于驱动圆环所在平面且穿过第一套筒、第二套筒、中心轴上的通槽,使得第一套筒、第二套筒、中心轴在周向上固定、在轴向上能够相对滑动。
36、作为本发明一种压电关节机械臂进一步的优化方案,所述k取8。
37、作为本发明一种压电关节机械臂进一步的优化方案,所述预紧机构中还包含防松螺母,所述防松螺母和所述第二套筒设有螺纹的一端螺纹相连,用于防止调节螺母松动。
38、本发明还公开了一种该压电关节机械臂的工作方法,包含以下步骤:
39、如果需要第一关节臂关于连接组件的中心轴相对第二关节臂正向转动:对连接组件中压电作动器的扭振模块施加预设的第一简谐电压信号,激励出压电复合梁的一阶扭转振动,诱发出驱动圆环的四阶面外弯曲振动a,进而通过驱动齿的摩擦驱动第一转子、第二转子正向转动,此时,第一套筒、第二套筒跟随第一转子、第二转子正向转动,而中心轴又通过销钉跟随第一套筒、第二套筒正向转动,最终使得第一关节臂关于连接组件的中心轴相对第二关节臂正向转动;
40、如果需要第一关节臂关于连接组件的中心轴相对第二关节臂反向转动:对连接组件中压电作动器的第一弯振单元、第二弯振单元施加预设的第二简谐电压信号,激励出压电复合梁的二阶弯曲振动,诱发出驱动圆环的四阶面外弯曲振动b,进而通过驱动齿的摩擦驱动第一转子、第二转子反向转动,此时,第一套筒、第二套筒跟随第一转子、第二转子反向转动,而中心轴又通过销钉跟随第一套筒、第二套筒反向转动,最终使得第一关节臂关于连接组件的中心轴相对第二关节臂反向转动。
41、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
42、(1)本发明中机械臂的驱动采用压电转换和摩擦驱动原理实现了关节的直接驱动,无需复杂传动机构,实现了结构功能一体化设计,具有结构简单紧凑的优势。
43、(2)本发明采用环-梁构型的夹心式单相驱动压电作动器构建关节机构,解决机械臂关节悬臂翘曲接触问题。
44、(3)本发明中机械臂关节的闭合或展开均使用单个电压信号驱动,使得机械臂关节的运动更容易控制。
- 还没有人留言评论。精彩留言会获得点赞!