一种易抓取避免货物脱落的工业机器人的制作方法
本发明涉及机器人设备,具体为一种易抓取避免货物脱落的工业机器人。
背景技术:
1、工业机器人是多关节机械手或多自由度的机器装置。工业机器人被广泛应用于电子、化工、物流等各个工业领域之中。
2、专利cn114454202a中公开了一种具有抓取脱落防护功能的工业机器人,包括夹持板以及设置在夹持板外部的防滑板,所述夹持板的内部设置有防护机构,所述防护机构包括控制件、电机、线轮、拉绳、第一导向杆、连接板、第一弹簧、防滑块,所述防滑板的内部设置有控制件;通过产品脱落时滑动带动滚轮转动,使得齿轮转动带动齿条移动,从而导电块与电源座接触并给电机通电,使得线轮转动对拉绳收卷并带动防滑块移动对产品进行夹持防滑,避免了产品脱落时直接掉落于载台或是地面之间直接发生碰撞导致发生损坏的情况发生,从而大大提高了产品抓取过程中的安全性,使得工业机器人的实用性以及稳定性都有效提高。
3、上述专利文献中抓取脱落防护功能的工业机器人,主要依靠防滑板和防滑块配合实现货物的防脱落处理,但是该防脱落方式完美依靠防滑板和防滑块与货物之间的摩擦力实现防脱落处理,该防脱落处理效果较差,尤其是在抓取重量较大的货物时,货物更容易脱落。
技术实现思路
1、本发明的目的在于提供一种易抓取避免货物脱落的工业机器人,以解决上述背景技术中提出的问题。
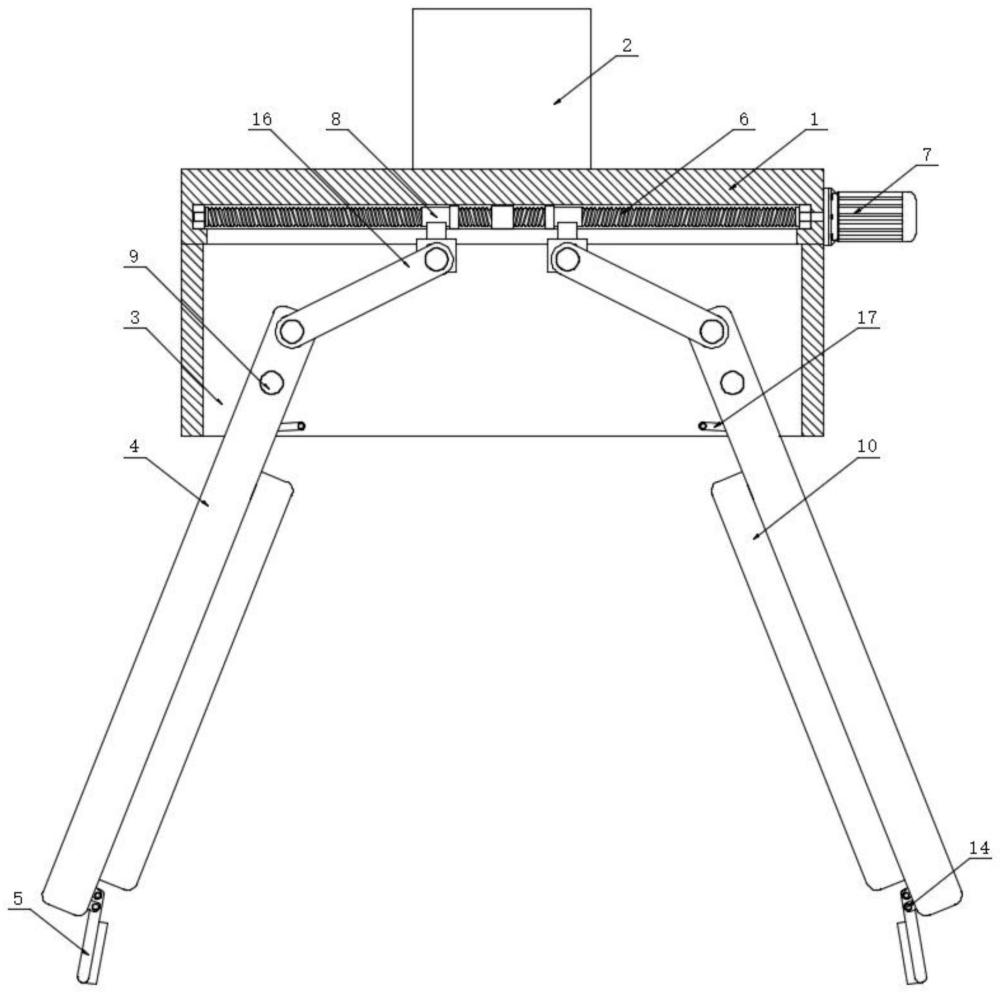
2、为了解决上述技术问题,本发明提供如下技术方案:一种易抓取避免货物脱落的工业机器人,包括机器人夹爪机构,所述机器人夹爪机构顶部设有连接头,所述机器人夹爪机构底部设有活动腔,所述活动腔内壁顶部设有驱动机构,所述活动腔内壁两侧于驱动机构下方对称设有活动连接的夹爪,所述夹爪底部设有活动连接的托架。
3、进一步的,所述驱动机构包括水平设置的双向滚珠丝杆,所述双向滚珠丝杆与活动腔内壁顶部转动连接,所述机器人夹爪机构外壁一侧设有伺服电机,所述伺服电机输出轴与双向滚珠丝杆一端固定连接,所述双向滚珠丝杆外壁两侧对称匹配套设有活动连接的丝杆螺母,所述丝杆螺母底部与夹爪顶部铰接,所述夹爪外壁通过第一支撑轴与活动腔内壁转动连接,两个所述夹爪外壁相邻一侧设有第一柔性垫,两个所述第一柔性垫外壁相邻一侧设有若干个凹槽,所述活动腔内壁于夹爪一侧设有第二支撑轴,所述夹爪内壁设有活动连接的支撑杆,所述支撑杆一端与第二支撑轴铰接,所述支撑杆另一端与托架一端铰接,且所述托架外壁通过第三支撑轴与夹爪转动连接,所述托架外壁靠近第一柔性垫一侧设有第二柔性垫。
4、进一步的,所述丝杆螺母与夹爪之间设有第一连接杆,所述第一连接杆一端与丝杆螺母底部转动连接,所述第一连接杆另一端与夹爪顶部转动连接。
5、进一步的,所述支撑杆与第二支撑轴之间设有第二连接杆,所述第二连接杆一端与支撑杆转动连接,所述第二连接杆另一端与第二支撑轴转动连接。
6、进一步的,所述支撑杆与托架之间设有第三连接杆,所述第三连接杆一端与支撑杆转动连接,所述第三连接杆另一端与托架转动连接。
7、进一步的,所述夹爪外壁设有与第二连接杆相匹配的第一槽口,所述夹爪外壁底部设有与第三连接杆相匹配的第二槽口,所述第三支撑轴设于第二槽口外侧。
8、进一步的,所述凹槽为半球形凹槽,相邻两个所述凹槽的间距等于所述凹槽的内径。
9、进一步的,所述支撑杆外壁设有若干个第一支撑球,所述夹爪内壁设有与支撑杆相匹配的通槽,所述夹爪内壁设有与第一支撑球相匹配的第一空腔,所述第一空腔与通槽贯通,所述第一柔性垫内壁于第一空腔一侧设有第二空腔,所述第一空腔与第二空腔贯通,所述第二空腔内侧设有活动连接的第二支撑球,所述第一柔性垫内壁于第二空腔一侧设有第三空腔,所述第三空腔与第二空腔贯通,所述第三空腔内侧设有活动连接的第三支撑球,所述第三支撑球外壁远离第二支撑球一侧设有活动连接的第四支撑球,所述第一柔性垫外壁开设有与第四支撑球相匹配的开口,所述第一柔性垫内壁于相邻两个第二空腔之间设有若干个第四空腔。
10、进一步的,所述第一空腔顶部和底部均设有与第一支撑球相匹配的第一球形槽,所述第二空腔内壁远离第一空腔一侧设有与第二支撑球相匹配的第二球形槽,所述第三空腔内壁远离第二空腔一侧设有与第三支撑球相匹配的第三球形槽,所述第三球形槽与开口贯通,所述第三支撑球外壁设有与第四支撑球相匹配的第四球形槽。
11、进一步的,所述第一支撑球外径与第二支撑球外径相等,所述第二支撑球外径大于第三支撑球外径,所述第三支撑球外径大于第四支撑球外径,同一组所述第二球形槽、第三球形槽、第四球形槽的球心位于同一条连线上。
12、与现有技术相比,本发明所达到的有益效果是:
13、1、本发明通过设置机器人夹爪机构、活动腔、夹爪、托架、双向滚珠丝杆、第一柔性垫、凹槽、支撑杆、第二柔性垫,伺服电机带动双向滚珠丝杆进行旋转运动,两个丝杆螺母同时向双向滚珠丝杆中心运动或者两个丝杆螺母同时向双向滚珠丝杆两端运动,两个丝杆螺母分别通过第一连接杆带动两个夹爪顶部进行往复运动,两个夹爪进行同步运动,夹爪沿着第一支撑轴进行旋转运动,夹爪顶部向活动腔内部内壁运动时,两个夹爪底部向中间运动,夹爪顶部向活动腔中心运动时,两个夹爪底部向两侧运动,两个夹爪底部同时向中心运动对货物进行夹持抓取处理,抓取操作方便快捷,两个夹爪底部同时向两侧运动对货物进行松开放松;第一柔性垫随着夹爪进行运动,第一柔性垫表面和货物表面柔性夹持处理,第一柔性垫在夹持抓取货物时可进行柔性变形缓冲,可有效适应不同造型的货物外壁,加强对货物表面的夹持处理效果,操作方便快捷;凹槽在第一柔性垫表面和货物表面进行接触,凹槽挤压变形,可有效将第一柔性垫吸附在货物表面,可有效加强第一柔性垫和货物表面贴合夹紧吸附处理效果,可有效加强对货物夹取处理效果,可有效避免货物在夹爪内侧脱落;支撑杆底部通过第二连接杆将托架一端向下推,托架另一端向上摆动,托架外壁的第二柔性垫摆动朝上,第二柔性垫和货物底部接触支撑,将货物底部进行托起,可有效对货物底部进行支撑,避免货物从夹爪之间脱落;对货物进行夹持处理时,夹爪外壁的第一柔性垫对货物的侧壁进行柔性夹持防滑处理,托架外壁的第二柔性垫对货物的底部进行柔性防滑支撑,可对货物底部进行托起,可有效加强对货物的夹持处理效果,可有效避免货物脱落。
14、2、本发明通过设置第一支撑球、第一空腔、第二空腔、第二支撑球、第三空腔、第三支撑球、第四支撑球,第一支撑球升降运动过程中,第一支撑球先和第二支撑球接触,第一支撑球将第二支撑球向外顶,第二支撑球沿着第二空腔向外运动,第二支撑球将第三支撑球向外顶,第三支撑球沿着第三空腔向外运动,第三支撑球被第二支撑球顶紧,第三支撑球和第三空腔内壁顶紧,第四支撑球随着第三支撑球运动,第四支撑球穿过开口运动到第一柔性垫外侧,第四支撑球在第一柔性垫外侧与货物外壁滚动接触;托架上顶将货物托起时,货物在第四支撑球滚动支撑下向上运动,使得货物在夹爪抓取夹持之后仍然可向上运动,可有效保证托架可正常运动到货物底部,将货物托起;随着支撑杆的继续运动,第一支撑球和第二支撑球逐渐分离,第四支撑球在货物外壁相互作用下,第四支撑球穿过开口进入到第三空腔内部,第三支撑球沿着第三空腔向内运动,第三支撑球将第二支撑球向内顶,第二支撑球沿着第二空腔向内运动,第二支撑球将第一支撑球向内顶,第一支撑球沿着第二空腔向内运动,此时货物外壁和第一柔性垫之间重新恢复到柔性吸附防滑处理,可有效保证对货物夹持处理效果,避免货物脱落;第四空腔的设置可有效加强第一柔性垫的柔性缓冲处理效果,加强第一柔性垫和货物外壁接触适应性和紧贴程度,提高设备对不同货物外壁夹取固定的适应性和稳定性;当不同造型货物外壁和第一柔性垫外壁接触时,货物外壁将第一柔性垫向外顶,第一柔性垫挤压变形,第一柔性垫内部的第三支撑球沿着第三空腔进行伸缩运动,第二支撑球沿着第二空腔进行伸缩运动,同时第二支撑球、第三支撑球和第四支撑球配合在第一柔性垫内部进行支撑,可有效加强第一柔性垫和货物外壁接触紧密性和稳定性,可进一步加强夹爪对货物的抓取夹持稳定性,避免货物发生脱落。
- 还没有人留言评论。精彩留言会获得点赞!