一种移动机械臂抓取位姿规划方法及装置
本技术属于图像处理,特别涉及一种移动机械臂抓取位姿规划方法及装置。
背景技术:
1、移动机械臂通过将机械臂与机器人移动底盘相结合起来,使机械臂的工作空间与操作灵活性得到极大提升。移动机械臂由机械臂载荷与移动底盘共同组成。移动机械臂的应用极其广泛,可以用于家庭服务机器人和工业仓库管理等诸多领域。在任务执行过程中,移动机械臂能够减少路径规划距离且避免碰撞的关键在于选择恰当的移动底盘位置。近些年来人们提出了多种指标来评估机器人在不同底盘位置情况下的操作性能,比如可及性、可操作度等。然而,上述传统评价指标在评价过程中忽略了机器人工作时对环境障碍物的考虑和抓取目标物体后自身质心的变化,无法满足复杂工况下对机器人操作安全性能的需求。
技术实现思路
1、为了解决上述技术问题至少之一,本技术提供了一种移动机械臂抓取位姿规划方法及装置,基于混合可操作度确定机械臂的抓取位置及姿态。
2、本技术第一方面提供了一种移动机械臂抓取位姿规划方法,主要包括:
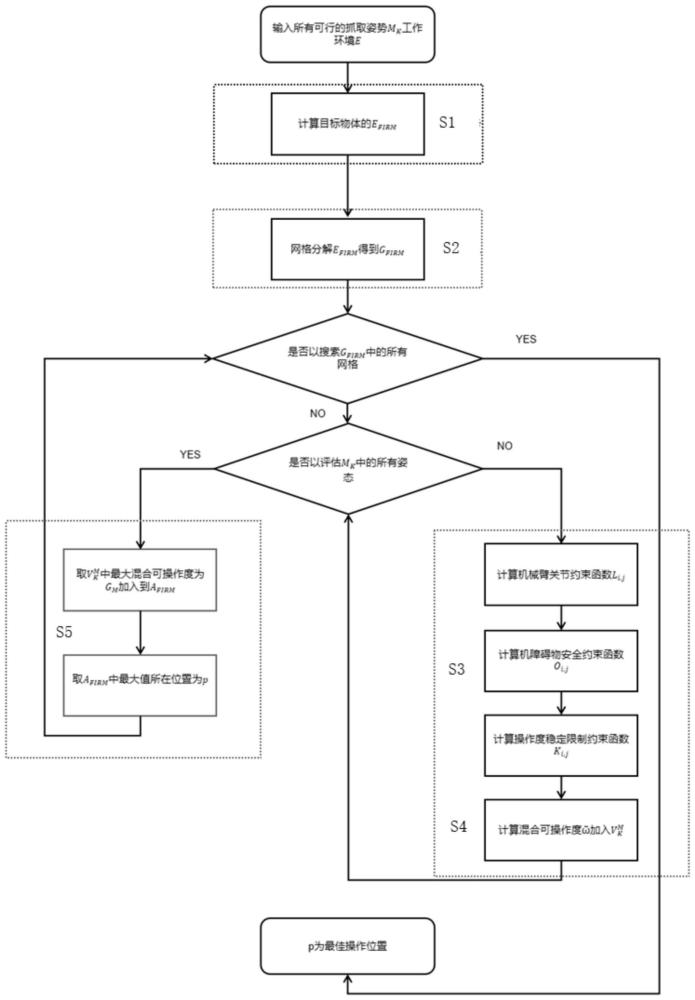
3、步骤s1、确定目标物体被抓可行性地图;
4、步骤s2、将所述可行性地图进行网格离散化处理,获得多个网格;
5、步骤s3、确定各网格的所有位姿的机械臂关节限制约束系数,障碍物安全限制约束系数,操作度稳定性限制约束系数;
6、步骤s4、根据所述械臂关节限制约束系数,障碍物安全限制约束系数,操作度稳定性限制约束系数计算各网格的各位姿的混合可操作度;
7、步骤s5、选取网格中各位姿的混合可操作度最大值作为该网格的混合可操作度指标,得到所有网格的评价指标集合,选取评价指标集合中的最大值对应的网格作为移动机械臂的最优移动底盘位置,该网格中的混合可操作度对应的位姿即为移动机械臂的机械臂载荷最优抓取姿态。
8、优选的是,步骤s1中,通过以下公式确定目标物体被抓可行性地图efirm:
9、
10、其中,e为移动机械臂的工作环境区域,eout为超出移动机械臂的机械臂载荷最大工作范围的区域,表示第b个障碍物占据区域;表示第b个障碍物安全膨胀区域;表示第b个障碍物遮挡区域,b为目标物体周围移动机械臂工作空间内的障碍物数量。
11、优选的是,步骤s3进一步包括:
12、(1)通过以下公式确定各位姿的机械臂关节限制约束系数:
13、
14、其中,针对机械臂的第q个位姿的第i个关节、第j个运动方向,ji,j(q)表示雅可比矩阵,i表示机械臂的关节序号,j表示机械臂关节在三维空间坐标系下的运动方向,其前三维分别表示在x,y,z轴上的运动,后三维表示绕x,y,z轴的旋转,γi为第i个关节的正负移动方向;
15、其中,和分别代表负关节限制系数和正关节限制约束系数,其在不同条件下的计算方式如下:
16、
17、
18、式中为关节限制约束函数h(q)的梯度,θi,max和θi,min分别表示第i个关节的最大和最小关节运动限制,θi为第i个关节自最小关节运动限制向最大关节运动限制方向偏转的角度,关节限制约束函数h(q)为:
19、
20、其中,γ为缩放器增益,n为关节数量;
21、(2)通过以下公式确定各位姿的障碍物安全限制约束系数:
22、
23、其中,其中和分别表示障碍物负向安全限制约束系数和障碍物正向安全限制约束系数,其在不同条件下的计算方式为:
24、
25、
26、式中表示障碍物安全限制约束函数f(q)的梯度,vj是障碍物与机械臂载荷之间最短距离向量,其中,安全限制约束函数f(q)为:
27、
28、式中,dobs(q)表示机械臂载荷在姿态为q时,障碍物到移动机械臂的机械臂载荷的最短距离,d*表示机械臂载荷的最大安全工作距离,η为安全系数;
29、(3)通过以下公式确定各位姿的操作度稳定性限制约束系数:
30、
31、其中,和分别表示稳定性限制约束负系数和稳定性限制约束正系数,当机械臂载荷操作过程中重心投影向趋近于移动底盘支撑边界方向运动时,选择稳定性限制约束负系数,其计算方式为:
32、
33、当机械臂操作过程中重心投影向远离移动底盘支撑边界方向运动时,选择稳定性限制约束正系数,其值为
34、上式中表示稳定性限制约束函数g(q)的梯度,稳定性限制约束函数g(q)为:
35、
36、式中,dstab表示移动机械臂操作过程中移动机械臂整体的重心投影点vcog到移动底盘支撑边界之间的最短距离,如果dstab≥0,表示重心投影点vcog在移动底盘支撑边界范围内部,如果dstab<0,表示vcog在移动底盘支撑边界外部,α和β是调整系数。
37、优选的是,步骤s4中,通过以下公式计算各网格的各位姿的混合可操作度:
38、
39、其中,表示混合雅可比矩阵,表示混合雅可比矩阵对应的特征值,所述混合雅可比矩阵中的每一项通过以下公式计算:
40、
41、其中,针对移动机械臂的第q个位姿的第i个关节、第j个运动方向,li,j(γ,q)为机械臂关节限制约束系数,oi,j(γ,q)表示障碍物安全限制约束系数,ki,j(γ,q)表示操作稳定性限制约束系数,ji,j(q)表示机械臂雅可比矩阵。
42、本技术第二方面提供了一种移动机械臂抓取位姿规划装置,主要包括:
43、可行性地图确定模块,用于确定目标物体被抓可行性地图;
44、网格化处理模块,用于将所述可行性地图进行网格离散化处理,获得多个网格;
45、限制约束系数计算模块,用于确定各网格的所有位姿的机械臂关节限制约束系数,障碍物安全限制约束系数,操作度稳定性限制约束系数;
46、混合可操作度计算模块,用于根据所述械臂关节限制约束系数,障碍物安全限制约束系数,操作度稳定性限制约束系数计算各网格的各位姿的混合可操作度;
47、位姿确定模块,用于选取网格中各位姿的混合可操作度最大值作为该网格的混合可操作度指标,得到所有网格的评价指标集合,选取评价指标集合中的最大值对应的网格作为移动机械臂的最优移动底盘位置,该网格中的混合可操作度对应的位姿即为移动机械臂的机械臂载荷最优抓取姿态。
48、优选的是,在所述可行性地图确定模块中,通过以下公式确定目标物体被抓可行性地图efirm:
49、
50、其中,e为移动机械臂的工作环境区域,eout为超出移动机械臂的机械臂载荷最大工作范围的区域,表示第b个障碍物占据区域;表示第b个障碍物安全膨胀区域;表示第b个障碍物遮挡区域,b为目标物体周围移动机械臂工作空间内的障碍物数量。
51、优选的是,所述限制约束系数计算模块包括:
52、机械臂关节限制约束系数计算单元,用于通过以下公式确定各位姿的机械臂关节限制约束系数:
53、
54、其中,针对机械臂的第q个位姿的第i个关节、第j个运动方向,ji,j(q)表示雅可比矩阵,i表示机械臂的关节序号,j表示机械臂关节在三维空间坐标系下的运动方向,其前三维分别表示在x,y,z轴上的运动,后三维表示绕x,y,z轴的旋转,γi为第i个关节的正负移动方向;
55、其中,和分别代表负关节限制系数和正关节限制约束系数,其在不同条件下的计算方式如下:
56、
57、
58、式中为关节限制约束函数h(q)的梯度,θi,max和θi,min分别表示第i个关节的最大和最小关节运动限制,θi为第i个关节自最小关节运动限制向最大关节运动限制方向偏转的角度,关节限制约束函数h(q)为:
59、
60、其中,γ为缩放器增益,n为关节数量;
61、障碍物安全限制约束系数计算单元,用于通过以下公式确定各位姿的障碍物安全限制约束系数:
62、
63、其中,其中和分别表示障碍物负向安全限制约束系数和障碍物正向安全限制约束系数,其在不同条件下的计算方式为:
64、
65、
66、式中表示障碍物安全限制约束函数f(q)的梯度,vj是障碍物与机械臂载荷之间最短距离向量,其中,安全限制约束函数f(q)为:
67、
68、式中,dobs(q)表示机械臂载荷在姿态为q时,障碍物到移动机械臂的机械臂载荷的最短距离,d*表示机械臂载荷的最大安全工作距离,η为安全系数;
69、操作度稳定性限制约束系数计算单元,用于通过以下公式确定各位姿的操作度稳定性限制约束系数:
70、
71、其中,和分别表示稳定性限制约束负系数和稳定性限制约束正系数,当机械臂载荷操作过程中重心投影向趋近于移动底盘支撑边界方向运动时,选择稳定性限制约束负系数,其计算方式为:
72、
73、当机械臂操作过程中重心投影向远离移动底盘支撑边界方向运动时,选择稳定性限制约束正系数,其值为
74、上式中表示稳定性限制约束函数g(q)的梯度,稳定性限制约束函数g(q)为:
75、
76、式中,dstab表示移动机械臂操作过程中移动机械臂整体的重心投影点vcog到移动底盘支撑边界之间的最短距离,如果dstab≥0,表示重心投影点vcog在移动底盘支撑边界范围内部,如果dstab<0,表示vcog在移动底盘支撑边界外部,α和β是调整系数。
77、优选的是,在所述混合可操作度计算模块中,通过以下公式计算各网格的各位姿的混合可操作度:
78、
79、其中,表示混合雅可比矩阵,表示混合雅可比矩阵对应的特征值,所述混合雅可比矩阵中的每一项通过以下公式计算:
80、
81、其中,针对移动机械臂的第q个位姿的第i个关节、第j个运动方向,li,j(γ,q)为机械臂关节限制约束系数,oi,j(γ,q)表示障碍物安全限制约束系数,ki,j(γ,q)表示操作稳定性限制约束系数,ji,j(q)表示机械臂雅可比矩阵。
82、本技术的第三方面,一种计算机设备,包括处理器、存储器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序用于实现如上所述的移动机械臂抓取位姿规划方法。
83、本技术的第四方面,一种可读存储介质,所述可读存储介质存储有计算机程序,所述计算机程序被处理器执行时用于实现如上所述的移动机械臂抓取位姿规划方法。
84、本技术通过混合可操作度确定移动机械臂抓取位姿,提高了机械臂对复杂工作环境的适应性,提升了安全性与稳定性,实现更灵巧地抓取操作,完成避障功能。
- 还没有人留言评论。精彩留言会获得点赞!