基于四足机器人多轴机械臂的环境自适应调节方法与流程
本发明涉及机器人自动化控制领域,具体为基于四足机器人多轴机械臂的环境自适应调节方法。
背景技术:
1、随着科技的快速发展,自动化与智能化已成为时代发展方向。机械臂的产生源于制造业对大规模自动化、数字化加工的需求。传统制造行业生产线上需要大量人力,而人的劳动强度高、效率低,难以满足生产的要求,因此需要一种可编程的自动化装置来代替人难以完成的工作。隧道巡检机器人是一种通过机械臂和摄像头等设备对隧道进行巡视、数据采集、安全监测、远程监控和自主导航的机器人;为了提高城市电缆的现代化管理水平,加大电力隧道的巡检力度,有效减轻巡检工作人员的工强度,避免电缆隧道安全事故的发生,电缆隧道智能巡检机器人的研究与应用迫在眉睫。而电缆隧道内环境复杂,现有巡检机器人无法根据隧道中不同的检测环境自动做出多轴机械臂伸展的调节,导致电力隧道的巡检效率低并存在安全问题。
2、中国专利,公开号:cn114347031b,公开日:2024年1月16日,公开了一种考虑时变时滞的移动机械臂避碰控制方法及装置,通过建立移动机械臂的时滞动力学模型,并通过估测算法获取系统的时变时滞,消除不确定网络延时对系统控制性能的影响;通过构建考虑时滞的模型预测控制算法,对时滞动力学模型进行控制输入的优化,考虑时滞的模型预测控制提高控制精度;同时,在进行避碰轨迹生成的时候,将系统的时变时滞信息加入到目标函数中,从而可以保证系统的安全性。而该发明主要提供一种通过计算机器人的避碰轨迹来对移动机械臂进行控制操作的方法,并未实现根据不同的实际环境状态做出自适应调节机械臂的伸展位置。
技术实现思路
1、本发明的目的是针对现有隧道巡检机器人的机械臂由于缺乏自适应调节能力,导致巡检效率低的问题;设计了基于四足机器人多轴机械臂的环境自适应调节方法,通过四足机器人的巡检需求预置巡检地点的空间位置坐标,设置必要巡检点建立待巡检地点合集根据该巡检地点合集开展巡检工作,构建全局地图结合空间位置坐标判断四足机器人是否顺利到达巡检地点,通过获取机器人的实时定位信息分析环境状态,再结合机器人历史运行数据对机械臂的伸展极限位置进行调节,以获取四足机器人多轴机械臂伸展路线的最优指令集,再根据最优指令集开展巡检工作,确保了巡检点的准确性,通过调节机械臂的伸展极限位置,缩减了机械臂的伸展时长,避免了机械臂碰撞损伤、延长机器人的运行时间,显著提高了巡检效率。
2、为解决上述技术问题,本发明采用的技术方案为:一种基于四足机器人多轴机械臂的环境自适应调节方法,包括以下步骤:
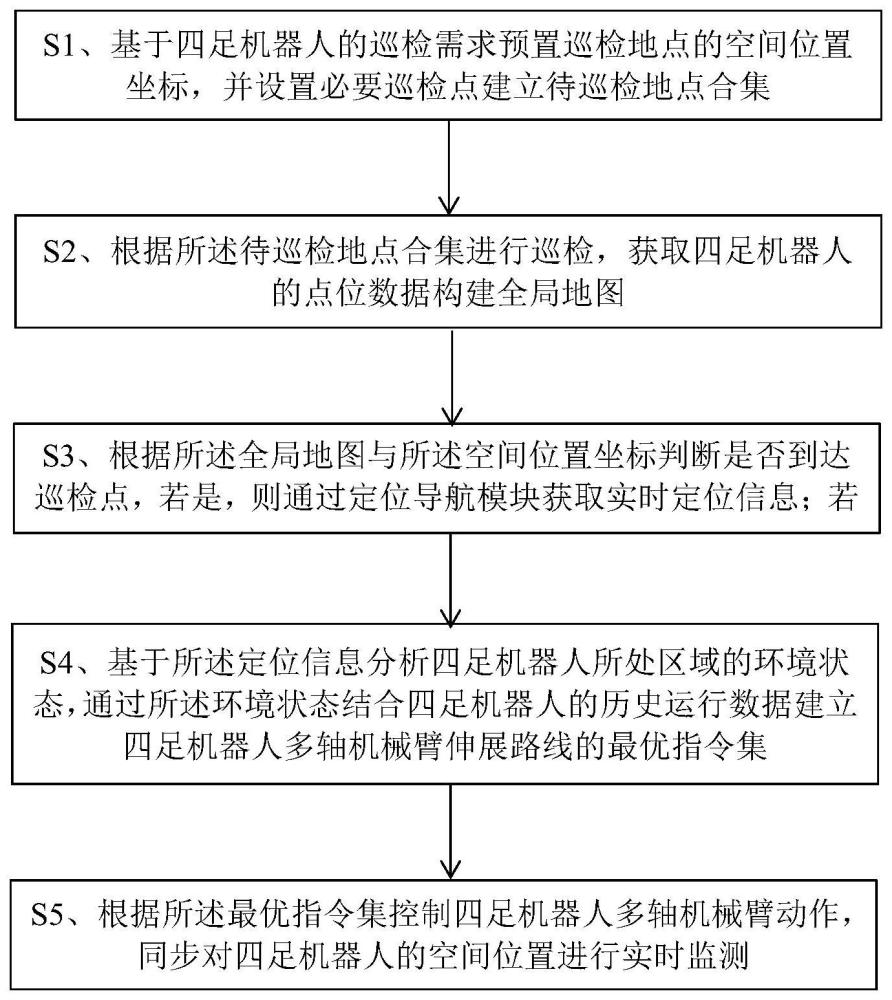
3、s1、基于四足机器人的巡检需求预置巡检地点的空间位置坐标,并设置必要巡检点建立待巡检地点合集;
4、s2、根据所述待巡检地点合集进行巡检,获取四足机器人的点位数据构建全局地图;
5、s3、根据所述全局地图与所述空间位置坐标判断是否到达巡检点,若是,则通过定位导航模块获取实时定位信息;若否,则执行s2;
6、s4、基于所述定位信息分析四足机器人所处区域的环境状态,通过所述环境状态结合四足机器人的历史运行数据建立四足机器人多轴机械臂伸展路线的最优指令集;
7、s5、根据所述最优指令集控制四足机器人多轴机械臂动作,同步对四足机器人的空间位置进行实时监测。
8、本方案中,根据巡检的需求预设巡检地点的空间位置坐标,有助于快速定位到每个巡检点,节省巡检工作时间,同时,通过空间位置坐标信息可以为后续构建全局地图工作提供参考数据;将每次巡检时预设的巡检点以及必要巡检点作为待巡检地点合集是为了确保巡检的全面性,避免遗漏巡检地点导致事故发生,也避免重复巡检或其他误检等情况的发生,从而提高巡检的准确性和效率,进一步保障电力隧道的安全;设置必要巡检点可以减少冗余巡检,有助于提前规划好巡检路线,确保巡检工作有序完成;构建全局地图可以全面的监控到巡检机器人的实际工况,以及辅助巡检地点的判断,保证了确定巡检地点的精准性;实时获取定位信息有助于准确地确定机器人所在位置,以及判断是否达到巡检点,从而在巡检过程中能够及时调整行动,保证巡检的准确性和完整性,同时,获取实时定位信息能够确保获取当前机器人实际环境状态信息,为建立机械臂伸展路线的最有指令集提供可靠支撑;建立最优指令集有益于巡检机器人自主控制多轴机械臂的动作,使其在巡检过程中能够更好地适应不同的环境情况,提高机器人在巡检过程中的适应性,缩减了机械臂的伸展时间,提高巡检的准确性和效率;实时监测巡检机器人的空间位置目的是保证巡检的准确性和安全性,同时也可以实时反馈巡检机器人的状态信息,便于后续的数据分析和性能优化。
9、优选地,所述s1包括如下子步骤:
10、为四足机器人配置示教模块并导入预巡检隧道图,对巡检地点进行预置得到相对应的空间位置坐标,同时设置必要巡检点,将必要巡检点以及其他预置的巡检地点作为待巡检地点合集。
11、优选地,所述s2包括如下子步骤:
12、s21、在四足机器人多轴机械臂搭载投送传感器,基于激光束投影方法将三维点云投影至二维深度图,获取地面点图像信息,将所述地面点图像信息的二维深度图均分得到v个子图,其中,v为阈值数值,将点云数量大于系统阈值cv的相应区域作为点云簇,并为所述点云簇分配标签;
13、s22、基于同类型标签中的所述点云簇提取t时刻的点云集合xt,获取所述点云集合xt中的连续点云集合st,并计算所述连续点云集合st的中心点的平滑度
14、s23、对所述平滑度进行排序分析,获取点云的特征点集合,并建立特征点集合的对应关系;
15、s24、根据所述特征点集合的对应关系计算相邻时刻的点云相对变化t;
16、s25、通过所述点云相对变化t构建全局地图。
17、优选地,所述s22中,所述平滑度的计算公式如下所示:
18、
19、式中,u为所述连续点云集合st中点云的数量和,为中心点到多线激光雷达的欧式距离,为所述连续点云集合st中第j个点云到多线激光雷达的欧式距离。
20、优选地,所述s23中,获取点云的特征点集合包括如下子步骤:
21、a1、对所述平滑度进行由大至小排序,基于排序结果将所述平滑度大于系统预设阈值cth的相应点云作为边缘点a,将所述平滑度小于系统预设阈值cth的相应点云作为平面点b;
22、a2、将所述边缘点a按顺序连续选取a个相应点云组成边缘特征点集合将所述平面点b按顺序连续选取个b点云组成平面特征点集合a3、合并所述边缘特征点集合与所述平面特征点集合得到特征集在所述特征集中获取t时刻的第一特征点集合以及t时刻的前一时刻的第二特征点集合
23、优选地,所述s23中,建立特征点集合的对应关系包括如下子步骤:
24、添加约束条件建立所述第一特征点集合与所述第二特征点集合的对应关系,得到第三特征点集合与第四特征点集合其中,以所述点云簇的标签信息作为所述对应关系的约束条件,在同类型标签的点云簇中,将任意两个点云连接为线,将任意三个不在同一直线上的点云连接为面,构建所述第三特征集合的点云到所述线的对应关系与所述第四特征点集合的点云到所述面的对应关系。
25、优选地,所述s24包括如下子步骤:
26、b1、基于空间位置坐标设置所述相对变化t的平移参量与欧拉角,所述平移参量包括四足机器人在x轴上的平移量tx、在y轴上的平移量ty以及在z轴上的平移量tz,所述欧拉角包括翻滚角θroll、俯仰角θpitch以及偏摆角θyaw;
27、b2、在相邻时刻的所述特征点集合中进行所述平移参量与所述欧拉角的匹配,获得四足机器人运行轨迹的相对位置关系,并将所述相对位置关系作为所述相对变化t。
28、优选地,所述s25包括如下子步骤:
29、c1、基于所述相对变化获取每个时刻的所述特征集并作为所述全局地图的特征集;
30、c2、在所述特征集中提取出与所述特征集相关联的点云,通过lm优化方法,构建所述特征集与其相关联的点云之间的位姿约束;
31、c3、通过回环检测方法以及gtsam优化方法对所述位姿约束进行优化,获得所述全局地图。
32、优选地,所述s4包括如下子步骤:
33、s41、基于所述历史运行数据和所述环境状态对多轴机械臂运行的极限位置进行调节,获得多轴机械臂的运动范围;
34、s42、获取多轴机械臂在所述运动范围内的运动轨迹的伸展时间,将所述伸展时间进行排序,将所述伸展时间最少的所述运动轨迹作为伸展路线的最优指令集。
35、优选地,所述s41还包括:
36、在四足机器人多轴机械臂的末端搭载局放传感器,通过局放传感器获取四足机器人的电力信号;
37、分析所述电力信号与所述环境状态判断多轴机械臂在运行中的碰撞情况,并根据碰撞情况对多轴机械臂的运动范围进行筛选,若所述运动范围内多轴机械臂产生碰撞,则不保留所述运动范围;若所述运动范围内多轴机械臂未产生碰撞,则保留所述运动范围。
38、本方案中,通过调节多轴机械臂各个关节点至多轴机械臂能达到的极限位置,可以准确的知道多轴机械臂的最大伸展范围,将最大伸展范围和全局地图相结合,就清晰的知道哪些运动轨迹会和实际环境产生碰撞,能够有效的减少碰撞对节多轴机械臂的损伤。
39、本发明的有益效果:
40、1、通过监测巡检的环境状态建立最优指令集,使得巡检机器人自主控制多轴机械臂的动作,实现对机械臂伸展指令的自适应调节,使其在巡检过程中能够更好地适应不同的环境情况,缩减了机械臂的伸展时长,显著提高了巡检的准确性和效率;
41、2、预置必要巡检点减少了冗余巡检,并且通过待巡检地点合集确保了巡检的全面性,避免遗漏巡检地点导致事故发生,也避免重复巡检或其他误检等情况的发生,从而提高巡检的准确性、可靠性、全面性和高效性,进一步保障电力系统的安全性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!