一种轮足复合的建筑巡检机器人及机械臂的定位抓取方法
本发明涉及机器人,具体涉及一种轮足复合的建筑巡检机器人及机械臂的定位抓取方法。
背景技术:
1、巡检机器人是一个集成了环境感知、目标决策以及视觉判定等多功能的综合系统。作为移动机器人应用层的一大分支,它凝聚了信号处理、计算机科学、自动化控制工程以及人工智能等多学科的研究成果。随着科学技术的发展,巡检机器人多用于医院、建筑工地、电网场地等地区,服务于医学、建筑学、电气工程学等领域,还经常被用于风电安全、城市安全、国防安全等重大国家安全领域。相比于人力巡检来说,巡检机器人有着抗干扰性、稳定性等优点,常用于巡检危险、恶劣环境的地区。在复杂环境下,对建筑巡检机器人机械臂抓取定位算法以及精度的要求也很高。通过巡检机器人以及机械臂的相互配合,从而使得机器能够完成相应的巡检任务,代替人的工作,保证了人的安全,具有巨大的经济效益和广阔的市场前景。
2、然而,在目前的发展境况下来看,普通的轮式巡检机器人有着抗环境干扰性差的缺点,面对飞沙走石的建筑工地环境来说,不能很好的适应环境。其会因道路的崎岖不平而影响自身的运动轨迹,对于环境多变的建筑工地来说,这无法满足其巡检需求;在复杂的巡检环境中,巡检机器人移动所带来的碰撞,以及环境的影响,都使得巡检机器人的运动产生一定的位移偏差,从而影响巡检机器人使用时的准确率以及效率。
3、因此,亟需一种轮足复合的建筑巡检机器人,来解决现有的轮式巡检机器人会因崎岖不平的道路,影响其使用时的准确率以及效率的问题。
技术实现思路
1、本发明针对现有技术中的不足,提供一种轮足复合的建筑巡检机器人及机械臂的定位抓取方法,以解决现有的轮式巡检机器人会因崎岖不平的道路,影响其使用时的准确率以及效率的问题。
2、为实现上述目的,本发明采用以下技术方案:
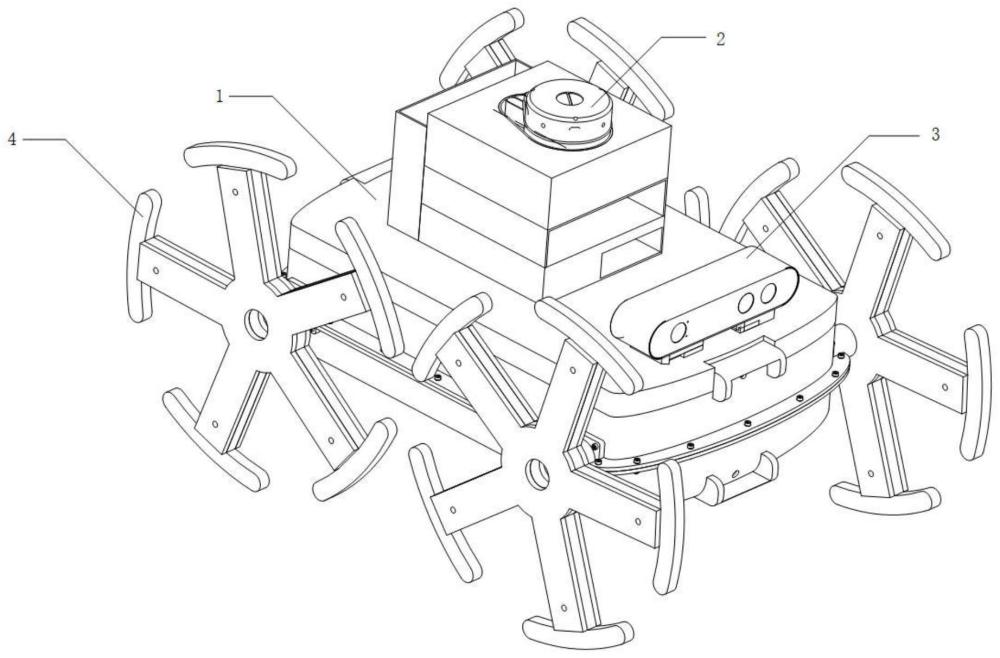
3、一种轮足复合的建筑巡检机器人,包括小车主体模块、雷达传感器模块、深度相机模块和星轮结构,所述小车主体模块上连接有雷达传感器模块和深度相机模块,所述星轮结构包括数个星型车轮和电机,数个所述星型车轮分别安装在小车主体模块的左右两侧,星型车轮包括星型车轮架和数个轮板,所述星型车轮架与小车主体模块转动连接,并由电机驱动转动,星型车轮架由数个向外扩展的肋板构成,所述肋板的外侧端部分别连接有一个轮板,数个轮板成环形分布,且相邻的轮板间存在间距。
4、为优化上述技术方案,采取的具体措施还包括:
5、进一步地,所述星型车轮架的肋板包括肋板一、肋板二、肋板三、肋板四和肋板五,所述轮板呈向内弯曲的弧形,且包括轮板一、轮板二、轮板三、轮板四和轮板五,所述星型车轮架还包括车轴,所述车轴用于与所述小车主体模块转动连接,车轴的外壁等间距且呈放射状连接有肋板一、肋板二、肋板三、肋板四和肋板五,所述肋板一、肋板二、肋板三、肋板四和肋板五的外侧端部分别对应与所述轮板一、轮板二、轮板三、轮板四和轮板五内侧的中心固定连接。
6、进一步地,所述轮板的外表面安装有橡胶垫。
7、进一步地,所述小车主体模块包括车体,所述车体包括主车架、前车头车架、后车头车架、车头、车尾、车右侧板、车左侧板、右前车轮车轴、右后车轮车轴、左后车轮车轴、左前车轮车轴、电源模块盒和雷达传感器安装模块,所述主车架的前端为车头,车头处安装有前车头车架,后端为车尾,车尾处安装有后车头车架,主车架的左侧安装有车左侧板,车左侧板的前后两侧分别安装有左前车轮车轴和左后车轮车轴,右侧安装有车右侧板,车右侧板的前后两侧分别安装有右前车轮车轴和右后车轮车轴,主车架的上端安装有雷达传感器安装模块用于安装雷达传感器模块,雷达传感器安装模块上还设有电源模块盒,用于安装电源模块。
8、进一步地,所述雷达传感器模块包括激光雷达、固定柱、旋转条带和驱动电机,激光雷达的顶部设有圆孔一,顶部的外圈设有圆孔二和圆孔三,激光雷达的侧壁设有通孔一和通孔二,在通孔一和通孔二之间设有激光发射孔,所述小车主体模块上连接有驱动电机,所述驱动电机的输出轴连接有固定柱,所述固定柱与激光雷达的底部共同套设有旋转条带,驱动电机用于驱动固定柱转动,固定柱通过旋转条带带动激光雷达旋转。
9、进一步地,所述深度相机模块包括深度摄像头,深度摄像头上设有红外激光发射器、rgb摄像头和红外摄像机,深度摄像头的前端面为镜面,所述红外激光发射器、rgb摄像头和红外摄像机均加装在镜面上,深度摄像头的下端分别设有摄像头左支架和摄像头右支架,深度摄像头通过摄像头左支架和摄像头右支架与小车主体模块进行连接固定。
10、进一步地,所述摄像头左支架包括左摄像头支架底撑、左摄像头支架转轴板和左摄像头支架底板,所述摄像头右支架包括右摄像头支架底撑、右摄像头支架转轴板和右摄像头支架底板,所述左摄像头支架底板和右摄像头支架底板安装在深度摄像头的下端,左摄像头支架底板和右摄像头支架底板上对应安装有左摄像头支架底撑和右摄像头支架底撑,所述左摄像头支架转轴板通过左摄像头支架底撑可转动的设置在左摄像头支架底板上,所述右摄像头支架底撑通过右摄像头支架底撑可转动的设置在右摄像头支架底板上。
11、进一步地,一种轮足复合的建筑巡检机器人的机械臂的定位抓取方法,
12、所述小车主体模块上还设有机械臂,深度相机模块安装于机械臂末端,与机械臂的夹爪保持平行;所述机械臂的定位抓取方法,包括如下步骤:
13、通过深度学习技术,利用深度相机模块的相机所采集的信息,对待抓物体进行识别,得出物体在图像中的坐标以及深度信息,并建立基坐标系、物体坐标系和相机坐标系,并获得的基坐标系、物体坐标系和相机坐标系之间的坐标转换关系;
14、通过进行深度相机模块的相机标定,得到相机的内参、外参以及畸变系数,从而得到物体相对于相机的三维坐标,即物体相对于相机的的相对位姿关系;再利用手眼标定模型的眼在手上标定模型,测算出相机相对于机械臂的末端执行器的相对位姿关系;再根据机械臂内置的反馈器,能够反馈末端执行器相对于基坐标系的相对位姿关系;根据以上四个单位的相对位姿关系,通过机器人坐标变换方程,即可确定待抓物体相对于机械臂的基坐标系的三维坐标;将该三维坐标转化成矩阵的形式传输给机械臂控制器,即可驱动机械臂进行物块的定位抓取任务。
15、进一步地,求解待抓物体相对于相机的三维坐标时,即待抓物体在相机坐标系中的三维坐标,通过opencv图像处理技术,得到物体在图像中的坐标xr,yr,zr,通过相机获取待抓物体的深度hr,图像坐标与实际坐标的转换比为实际距离*物体深度/像素值,像素值为b,设转换比为αx,αy,αz;
16、则x轴向放大系数为
17、则y轴向放大系数为
18、则z轴向放大系数为
19、根据物体坐标系以及相机坐标系,得出物体相对于相机的位移坐标转换关系为
20、当机械臂正对于待抓物体时,物体相对于机械臂基座的位置关系不发生变化,此时得到的旋转矩阵为正对旋转矩阵a,正对旋转矩阵则物体相对于相机的坐标转换关系为
21、通过手眼标定模型,根据相机坐标系以及末端执行器坐标系,得到相机相对于末端执行器的旋转矩阵mc→h,由于相机与末端执行器的位置关系相对固定,则旋转矩阵mc→h为固定值;
22、再根据机械臂内置的末端执行器位姿反馈器,能够反馈末端执行器相对于基坐标系的相对位姿关系,通过函数调用得到1*4的矩阵m'=[xm ym zmθ],
23、根据末端执行器坐标系以及基坐标系,得到末端执行器相对于机械臂的基坐标的位移坐标转换关系为
24、其中,xm是末端执行器在基坐标系下x轴的位移大小,即水平向右,ym是末端执行器在基坐标系下y轴的位移大小,即水平向前,zm是末端执行器在基坐标系下z轴的位移大小,即竖直向上,θ为末端执行器相对于预设旋转零点的旋转角度,由于机械臂绕z轴旋转,则可得旋转矩阵
25、将矩阵m'转化为
26、综上,目标旋转矩阵为m=mh→b mc→h mo→c,将目标旋转矩阵通过ros机器人操作系统与dobot通信,传输给机械臂执行抓取任务。
27、进一步地,所述机械臂采用dobot机械臂。
28、本发明的有益效果是:
29、本发明通过星轮结构的设置,利用轮板之间的间距,可以使得巡检机器人在进行巡检任务时,能够克服地面复杂性所带来的弊端,避免如普通轮式结构机器人在地面复杂度较高的情况下,会出现打滑等情况出现,从而改变自己的运动方向等状况;并且,星轮式巡检机器人,在进行坡度较大的巡检任务时,可以通过轮板之间的间距增强星型车轮的抓持力,从而克服坡度带来的运动限制,可以进行坡度较缓的上坡任务,放宽了机器人的运动条件。通过数个轮板构成的环形结构,在设计上能够增加更多的接触面积,使得车轮能够更好地抓住地面,这对于巡检车辆或者需要在复杂路况下行驶的车辆来说尤为重要,星型车轮的抓地性能可以提供更好的牵引力和操控性能。另外,星型车轮的多个支撑点可以提供更好的减震效果,减少车辆在行驶过程中的颠簸和震动,可以避免在其车身上的传感器等装置发生形变或位移。
30、本发明通过将物体的实际三维坐标拆分为三维空间坐标以及机械臂旋转角度,根据旋转矩阵公式,以及判断绕哪个轴旋转,转换为相对应的旋转矩阵。该方法更加的模块化,简化计算流程,更有利于得出所需物体的三维坐标,从而控制机械臂执行识别以及抓取的任务。本发明通过使用深度学习,检测物体位置并通过解算位姿,求得实际坐标,并控制机械臂进行抓取,过程简单,易于实现,并且耗费较少,定位精度较高。
- 还没有人留言评论。精彩留言会获得点赞!