一种防爆化工轮式巡检机器人的制作方法
本发明涉及工业机器人,特别是涉及一种防爆化工轮式巡检机器人。
背景技术:
1、二十一世纪以来,随着智能化在国民经济各领域的发展、智能机器人的发展也随之取得了长足的进度。防爆机器人作为特种机器人的一种,随着社会经济的迅猛发展而出现的,目前主要用于化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故预防。以往,化工行业一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,不仅任务完成难度大,还会徒增人员伤亡。而石化行业防爆罐区智能巡检机器人技术的应用,通过机器人的巡检,减少人力巡查的难度及重复性,将大大减少伤害事故的发生,在石化行业有着深远的意义。
2、化工生产中的爆炸因素包括环境粉尘浓度异常、环境可燃气体浓度异常、环境温度异常以及环境湿度异常等。中国专利(授权公告号为:cn 113100670b)公开了一种具有气体泄漏检测功能的化工防爆巡检机器人,包括支撑底板、驱动轮、中心块、第一齿轮盘、第二齿轮盘、旋转圆盘、固定块、支撑架和第二旋转驱动电机,所述支撑底板内部开设有限位滑槽,且支撑底板侧面安装有伺服电机,并且伺服电机侧面固定安装有第一限位块,所述驱动轮安装在伺服电机外侧,且伺服电机上方固定安装有第一限位柱体,并且第一限位柱体外侧安装有第一弹簧,所述中心块固定安装在支撑底板上方,且中心块内部开设有第一柱形通孔,并且中心块内部安装有第一旋转驱动电机,所述第一齿轮盘安装在中心块内部,且中心块内部安装有定位轴承,并且定位轴承之间安装有中心旋转柱,所述第二齿轮盘安装在中心旋转柱外侧,所述中心块的内部上方开设有环形滑槽,且中心块前方安装有控制器,所述旋转圆盘安装在中心块上方,且旋转圆盘下方安装有第二限位块,并且旋转圆盘外侧安装有防撞雷达,所述固定块安装在旋转圆盘上方,且固定块前方安装有环境气体检测器,并且固定块上方安装有监控摄像头和警报器,所述支撑架安装在固定块外侧,且支撑架下方安装有电动伸缩杆,并且电动伸缩杆下端安装有通孔块,所述通孔块内部开设有第二柱形通孔,且通孔块下方安装有第二限位柱体,并且第二限位柱体外侧安装有第二弹簧,所述第二旋转驱动电机安装在第二弹簧下方,且第二旋转驱动电机下方安装有毛刷块。在工作时,首先伺服电机的运行能够带动驱动轮旋转,从而驱动机器人整体进行运动,过程中控制支撑底板两侧伺服电机的转动方向可以实现机器人的转向,机器人行驶过程中,当驱动轮压过凸起物,此时伺服电机向上移动,此时第一限位块能够在限位滑槽中滑动,同时第一限位柱体能够在第一柱形通孔中向上滑动,第一弹簧可以对挤压力实现缓冲的作用,从而提升了减震效果,过程中第一旋转驱动电机的驱动能够带动第一齿轮盘旋转,从而使得第一齿轮盘能够带动第二齿轮盘旋转,从而使得中心旋转柱的旋转能够带动旋转圆盘在中心块上方旋转,过程中第二限位块可以在环形滑槽中运动,提高了旋转的稳定性,此时环境气体检测器可以随着旋转圆盘的旋转而旋转,当环境气体检测器检测到空气中泄漏气体指标超出预计范围,此时警报器亮起产生警报,从而使得可以大范围多方位的对气体泄漏进行检测,并且可以及时的警示安全人员,行驶过程中防撞雷达可以检测周围的物体,从而避免机器人与物体之间的碰撞,监控摄像头可以对周围的环境进行实时监控。
3、上述文件中公开了监控摄像头及环境气体检测器作为数据采集单元,也仅仅只能采集实时画面数据及泄露气体浓度数据,显然采集的数据不够全面,同时其监控摄像头位置固定,存在数据采集效果不佳的问题。对于化工巡检的环境,如上述文件公开的监控摄像头的布置,其监控摄像头极易沾染灰尘,必须定期手动清洁才能保证良好的工作效果。
4、基于此,本发明提出一种防爆化工轮式巡检机器人,以解决上述提出的问题。
技术实现思路
1、本发明的目的在于,提供一种防爆化工轮式巡检机器人,实现实时画面、温度、湿度、粉尘浓度以及气体浓度数据的多种爆炸因素数据的采集,同时实现监控摄像头高度以及监控摄像头拍摄时灰尘遮挡物的自清洁。
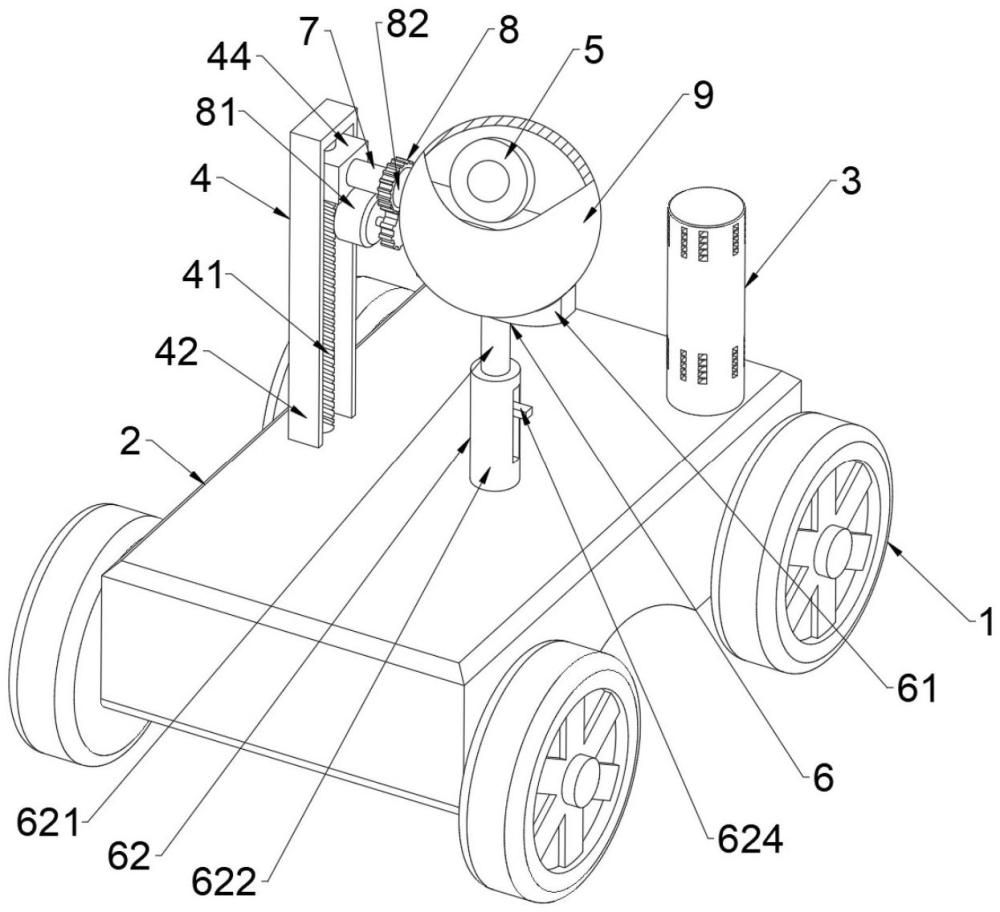
2、为解决上述技术问题,本发明提供一种防爆化工轮式巡检机器人,包括轮式行走机构、控制底座、传感器组器件、升降机构、监控摄像头以及清洁机构,所述轮式行走机构安装在所述控制底座底部,所述传感器组器件安装在所述控制底座上,用于采集空间温度、湿度、粉尘浓度以及气体浓度的数据,所述升降机构安装在所述控制底座上,用于驱动所述监控摄像头进行升降调节,所述监控摄像头连接有连接轴,所述监控摄像头外围设置有透明球罩,所述连接轴贯穿所述透明球罩与所述透明球罩转动连接,且所述连接轴上安装有用于驱动所述透明球罩以连接轴中轴线为旋转轴转动的旋转驱动机构,所述清洁机构包括清理刷条以及弹性伸缩杆,所述清理刷条位于所述透明球罩下方且所述透明球罩表面贴合,所述清理刷条与所述控制底座之间连接有所述弹性伸缩杆。
3、进一步的,所述传感器组器件包括温度传感器、湿度传感器、粉尘传感器以及气体传感器。
4、进一步的,防爆化工轮式巡检机器人还包括控制处理机构以及充电电源,所述控制处理机构以及充电电源均安装在所述控制底座内,所述充电电源用于为所述轮式行走机构、传感器组器件、升降机构、监控摄像头、旋转驱动机构以及控制处理机构提供运行所需电力,所述控制处理机构包括控制处理器单元、存储单元、无线传输单元、定位单元,所述控制处理器单元用于对所述传感器组器件和监控摄像头采集的数据进行处理以及发送控制指令以实现轮式行走机构、监控摄像头、升降机构以及旋转驱动机构运作,所述存储单元与所述控制处理器单元连接,用于存储相应控制文件,所述无线传输单元与所述控制处理器单元连接,用于远程数据传输,所述定位单元与所述控制处理器单元连接,用于采集位置信息。
5、进一步的,所述旋转驱动机构包括旋转驱动电机以及一对啮合的传动齿轮,所述旋转驱动电机固定安装在所述连接轴上,一对啮合的所述传动齿轮中的其中一个安装在所述旋转驱动电机输出轴上,且一对啮合的所述传动齿轮中的另外一个固定在所述透明球罩上。
6、进一步的,所述弹性伸缩杆包括与所述清理刷条连接的内杆以及与所述控制底座连接的外筒,所述外筒滑动套设在所述内杆上,所述内杆位于所述外筒内部的一端与所述外筒内端面之间连接有压缩弹簧。
7、进一步的,所述清理刷条与所述内杆可拆卸连接。
8、进一步的,所述内杆端面开设有定位插槽,所述清理刷条上安装有与所述定位插槽相匹配的定位块,所述定位插槽端面与所述定位块之间磁性吸附连接。
9、进一步的,所述定位插槽开口端做倒角处理。
10、进一步的,所述内杆侧壁安装有推把,所述外筒侧壁沿其长度方向贯穿开设有拆卸槽,所述推把远离所述内杆的一端穿过所述拆卸槽至所述外筒外侧。
11、进一步的,所述升降机构包括驱动丝杆、导向轨道、升降驱动电机以及驱动滑块,所述驱动丝杆竖直转动安装在所述控制底座上,所述导向滑轨竖直固定安装在所述控制底座上,所述升降驱动电机安装在所述控制底座内,且所述升降驱动电机输出轴与所述驱动丝杆传动连接,所述驱动滑块螺纹安装在所述驱动丝杆上,且所述驱动滑块与所述导向轨道滑动连接。
12、相比于现有技术,本发明至少具有以下有益效果:
13、(1)本发明通过监控摄像头以及传感器组器件的设置,对相关区域进行实时画面、温度、湿度、粉尘浓度以及气体浓度数据的采集,配合轮式行走机构,实现了多种爆炸因素的巡航检测采集。
14、(2)本发明利用升降机构的设置,可实现监控摄像头拍摄高度的调整,有效提升了巡检的效果。
15、(3)本发明利用清洁机构,配合旋转驱动机构驱动透明球罩转动,可实现透明球罩表面的自清洁,有效避免了因灰尘遮挡监控摄像头镜片导致拍摄画面不清晰的情况的发生,提升了巡检的效果;
16、进一步的,清洁机构中的清理刷条拆卸安装方便,便于对清理刷条及性能维护和更换。
- 还没有人留言评论。精彩留言会获得点赞!