一种钢筋绑扎机器人的位姿控制方法及装置
本发明涉及智能控制领域,具体涉及一种钢筋绑扎机器人的位姿控制方法及装置。
背景技术:
1、目前钢筋施工现场存在复杂的环境条件,如钢筋摆放的不规则性、施工现场的障碍物等。其中,在施工现场,钢筋往往以各种不规则的方式摆放,可能存在弯曲、交叉、重叠等情况。这使得机器人难以准确地识别和抓取每根钢筋,导致绑扎操作不准确。同时,施工现场通常会有其他建筑材料、设备、人员等障碍物,这些障碍物可能会阻碍机器人的运动路径,使其无法顺利到达需要绑扎的钢筋位置。另外,施工现场的地形可能不平坦,空间有限,这对机器人的运动灵活性和适应性提出了挑战。机器人可能难以在狭窄的空间内操作,或者在不平整的地面上保持平衡。
2、基于此,现阶段的机器人难以适应这些变化,导致绑扎操作不准确或失败。
技术实现思路
1、有鉴于此,本发明实施例提供了一种钢筋绑扎机器人的位姿控制方法及装置,以解决现阶段的机器人难以适应这些变化,导致绑扎操作不准确或失败的问题。
2、第一方面,本发明实施例提供了一种钢筋绑扎机器人的位姿控制方法,所述方法包括:
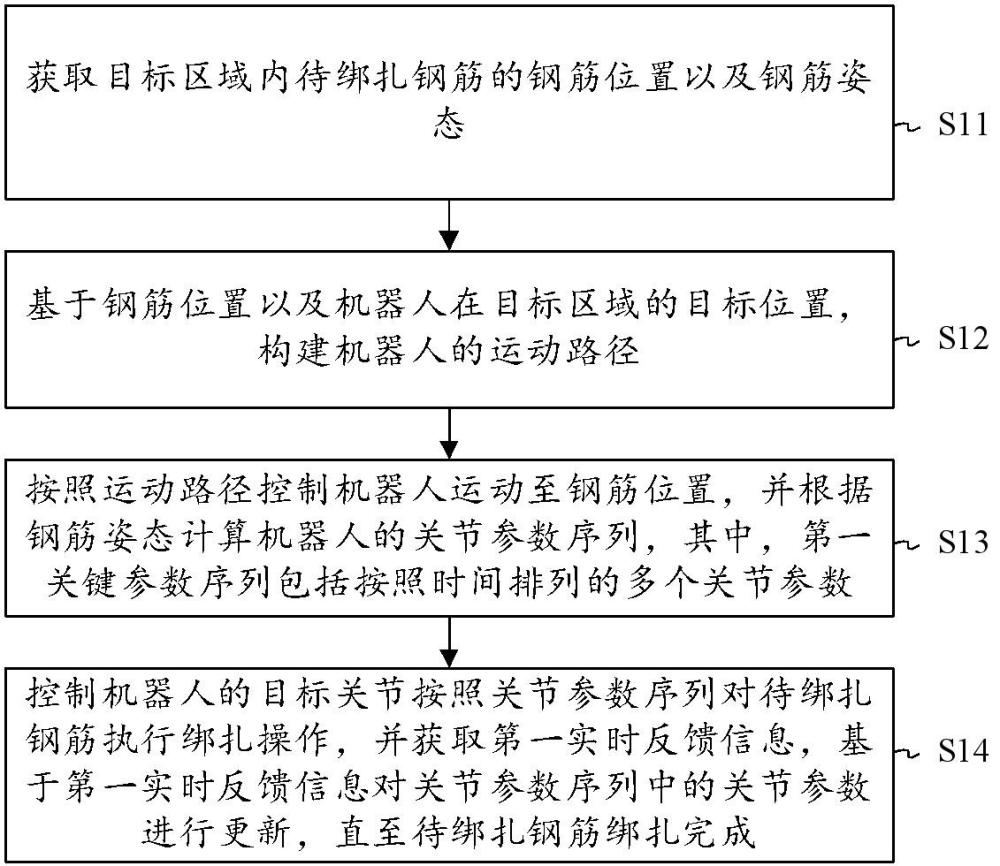
3、获取目标区域内待绑扎钢筋的钢筋位置以及钢筋姿态;
4、基于所述钢筋位置以及机器人在所述目标区域的目标位置,构建所述机器人的运动路径;
5、按照所述运动路径控制所述机器人运动至所述钢筋位置,并根据所述钢筋姿态计算所述机器人的关节参数序列,其中,所述第一关键参数序列包括按照时间排列的多个关节参数;
6、控制所述机器人的目标关节按照所述关节参数序列对所述待绑扎钢筋执行绑扎操作,并获取第一实时反馈信息,基于所述第一实时反馈信息对所述关节参数序列中的关节参数进行更新,直至所述待绑扎钢筋绑扎完成。
7、进一步的,所述获取目标区域内待绑扎钢筋的钢筋位置以及钢筋姿态,包括:
8、调用设置于所述机器人的检测装置采集所述目标区域的点云数据;
9、对所述点云数据进行预处理,得到处理后的点云数据;
10、将所述处理后的点云数据划分为不同的点云数据集,其中,不同的点云数据集表示不同的目标区域中不同的区域;
11、提取点云数据集的点云特征,并将提取的特征与预设钢筋特征进行匹配,从而得到所述钢筋位置;
12、从不同的点云数据集中提取钢筋位置相匹配的目标点云数据,基于所述目标点云数据确定所述钢筋姿态。
13、进一步的,所述基于所述钢筋位置以及机器人在所述目标区域的目标位置,构建所述机器人的运动路径,包括:
14、基于所述目标区域的点云数据构建所述目标区域的网格地图;
15、检测所述目标区域内障碍物的障碍物位置,并将所述网格地图中障碍物位置所对应的网格标记为障碍节点;
16、构建开放列表和关闭列表,其中,所述开放列表用于存储待扩展的节点,关闭列表用于存储已经处理过的节点。;
17、分别将所述目标位置和钢筋位置作为初始节点和目标节点,并使用欧几里得距离计算所述网格地图中每个节点到目标节点的估计距离;
18、基于所述起始节点依次从所述开放列表中选择最小估计距离的节点作为最优节点,并将所述最优节点移动到关闭列表;
19、对所述最优节点的相邻节点进行扩展得到扩展节点,并计算所述扩展节点对应的估计距离;
20、若所述扩展节点满足路径更新条件,则更新路径,直至得到由所述起始节点至所述目标节点的运动路径。
21、进一步的,所述根据所述钢筋姿态计算所述机器人的关节参数序列,包括:
22、获取所述机器人对应的机械结构,分析所述机器人对应的机械结构得到所述机器人中每个关节对应的运动特征;
23、根据每个关节对应的运动特征确定关节运动关系,并利用所述关节运动关系以及所述关节的关节参数构建所述机器人对应的运动学模型;
24、基于所述运动学模型以及所述钢筋姿态确定机器人待执行的目标动作,并解析所述目标动作的关节参数序列。
25、进一步的,所述基于所述运动学模型以及所述钢筋姿态确定机器人待执行的目标动作,并解析所述目标动作的关节参数序列,包括:
26、通过所述运动学模型以及逆向运动学算法对所述钢筋姿态进行计算,得到目标动作,其中,目标动作描述了机器人关节的运动轨迹;
27、对所述目标动作进行解析,提取出第一关节的参数序列,其中,所述关节参数序列包括关节的角度、角速度和角加速度。
28、进一步的,所述通过所述运动学模型以及逆向运动学算法对所述钢筋姿态进行计算,得到目标动作,包括:
29、基于所述运动学模型确定所述机器人的末端执行器位置;
30、将所述末端执行器位置以及所述钢筋姿态输入到逆向运动学算法,得到一组关节变量值,其中,所述逆向运动学算法用于根据给定的末端执行器位置和钢筋姿态,输出相应的关节变量值;
31、根据所述关节变量值确定所述关节的关节运动轨迹,并将所述关节运动轨迹拆分为多个的离散行为,形成目标动作。
32、进一步的,所述获取第一实时反馈信息,基于所述第一实时反馈信息对所述关节参数序列中的关节参数进行更新,直至所述待绑扎钢筋绑扎完成,包括:
33、通过部署在所述机器人上的传感器检测第一实时反馈信息;
34、基于所述第一实时反馈信息计算所述机器人当前执行的第一离散行为对应的第一奖励信号;
35、根据所述第一奖励信号以及所述机器人的第一状态确定第二离散行为,并将所述第二离散行为对应的关节参数更新至所述关节参数序列得到更新后的关节参数序列;
36、基于更新后的关节参数序列继续对所述待绑扎钢筋执行绑扎操作,并检测第二实时反馈信息,并基于所述第二实时反馈信息计算所述机器人当前执行的第二离散行为对应的第二奖励信号;
37、根据第二奖励信号以及所述机器人的第二状态继续对所述关节参数序列中的关节参数进行更新,直至所述待绑扎钢筋绑扎完成。
38、第二方面,本发明实施例提供了一种钢筋绑扎机器人的位姿控制装置,所述装置包括:
39、获取模块,用于获取目标区域内待绑扎钢筋的钢筋位置以及钢筋姿态;
40、构建模块,用于基于所述钢筋位置以及机器人在所述目标区域的目标位置,构建所述机器人的运动路径;
41、计算模块,用于按照所述运动路径控制所述机器人运动至所述钢筋位置,并根据所述钢筋姿态计算所述机器人的关节参数序列,其中,所述第一关键参数序列包括按照时间排列的多个关节参数;
42、控制模块,用于控制所述机器人的目标关节按照所述关节参数序列对所述待绑扎钢筋执行绑扎操作,并获取第一实时反馈信息,基于所述第一实时反馈信息对所述关节参数序列中的关节参数进行更新,直至所述待绑扎钢筋绑扎完成。
43、第三方面,本发明实施例提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的方法。
44、第四方面,本发明实施例提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的方法。
45、本技术实施例通过获取钢筋位置和姿态,并预先规划机器人的运动路径,机器人可以快速、准确地到达绑扎位置,减少了搜索和调整的时间,从而提高了绑扎效率。其次,根据钢筋的姿态计算关节参数序列,能够确保机器人的绑扎动作精确匹配钢筋的形状和位置,提高了绑扎的准确性和质量。获取第一实时反馈信息,并基于该信息对关节参数进行更新,使机器人能够根据实际情况及时调整绑扎动作,适应不同的绑扎条件和需求。另外,本技术实现了待绑扎钢筋的自动识别、路径规划和绑扎操作,大大降低了人工干预的程度。
- 还没有人留言评论。精彩留言会获得点赞!