一种机械臂标定系统、方法及装置与流程
本技术涉及自动化设备,更具体地说,涉及一种机械臂标定系统、方法及装置。
背景技术:
1、机械臂是一种可以模拟人类手臂运动的机械设备,因其具备重现性高、操作精度高等优点,逐渐被广泛应用,而机械臂的标定是提升机械臂重现性和操作精度的重要手段之一。其中,机械臂的标定是针对机械臂的各个关节的几何参数、运动路径等进行精确测量和调试的过程,以提高机械臂的运动精度和重现性,确保机械臂能够更准确地按照标定的运动路径执行任务。
2、目前机械臂的标定方案有手动标定、示教器标定、传感器标定等,如:操作者手动移动机械臂的关节或末端执行器,不断调整机械臂的姿态,将机械臂移动至目标位置后,记录机械臂的运动轨迹中各点位信息;或者,操作者使用示教器设备,通过示教器上的按钮,移动机械臂,记录机械臂的运动轨迹中各点位信息,实现标定。
3、上述方案的缺点在于:要求操作者掌握一定的机械臂运动学、控制原理等知识,人力成本较高;并且人为标定的精确度和效率较低。因此,如何提升机械臂标定的精确度和效率,成为亟待解决的技术问题。
技术实现思路
1、有鉴于此,本技术提供了一种机械臂标定系统、方法及装置,用于解决机械臂标定精确度和效率低的问题。
2、为了解决上述问题,现提出的方案如下:
3、本技术第一方面提供了一种机械臂标定系统,包括:标定平台、机械臂和处理器;
4、所述机械臂安装于所述标定平台,所述机械臂在所述标定平台确定的运动空间内运动,且,所述运动空间的每一空间点位设置有空间坐标;
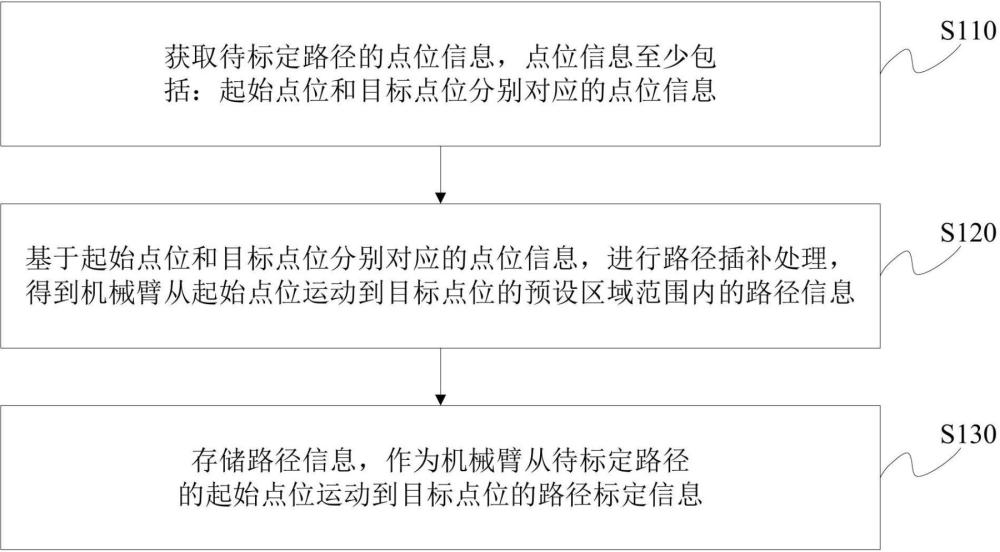
5、所述处理器用于获取待标定路径的点位信息,所述点位信息至少包括:起始点位和目标点位分别对应的点位信息,所述点位信息至少包括:空间坐标和姿态信息;
6、基于所述起始点位和所述目标点位分别对应的所述点位信息,进行路径插补处理,得到所述机械臂从所述起始点位运动到所述目标点位的预设区域范围内的路径信息,所述路径信息至少包括:至少一个中间点位的点位信息;
7、存储所述路径信息,作为所述机械臂从所述待标定路径的所述起始点位运动到所述目标点位的路径标定信息。
8、在一种可能的实现中,机械臂标定系统还包括:安装于所述机械臂的法兰末端的机械手,所述机械手用于抓取或放置目标物体。
9、在一种可能的实现中,所述机械手包括:机械夹爪,以及安装在所述机械夹爪内侧和底侧的测距传感器,所述测距传感器用于测量所述机械夹爪的内侧与所述目标物体之间的距离,以及所述机械夹爪的底侧与所述标定平台之间的距离。
10、本技术第二方面提供了一种机械臂标定方法,应用于所述的机械臂标定系统中的处理器,所述机械臂标定系统至少还包括:标定平台和机械臂,所述机械臂标定方法包括:
11、获取待标定路径的点位信息,所述点位信息至少包括:起始点位和目标点位分别对应的点位信息,所述点位信息至少包括:空间坐标和姿态信息;
12、基于所述起始点位和所述目标点位分别对应的所述点位信息,进行路径插补处理,得到所述机械臂从所述起始点位运动到所述目标点位的预设区域范围内的路径信息,所述路径信息至少包括:至少一个中间点位的点位信息;
13、存储所述路径信息,作为所述机械臂从所述待标定路径的所述起始点位运动到所述目标点位的路径标定信息。
14、在一种可能的实现中,在所述机械臂标定系统还包括机械手,且所述标定平台确定的所述机械臂的运动空间被划分为四个区域的情况下;
15、所述基于所述起始点位和所述目标点位分别对应的所述点位信息,进行路径插补处理,得到所述机械臂从所述起始点位运动到所述目标点位的预设区域范围内的路径信息,包括:
16、确定所述机械臂处于所述起始点位时,所述机械手在所述运动空间所处的区域,记作第一区域;
17、确定所述机械臂处于所述目标点位时,所述机械手在所述运动空间所处的区域,记作第二区域;
18、基于所述第一区域和所述第二区域,确定所述机械臂从所述起始点位运动到所述目标点位的区域变量;
19、根据所述区域变量、所述起始点位和所述目标点位分别对应的所述点位信息进行路径插补处理,得到多个中间点位的点位信息;
20、将多个所述中间点位的点位信息的集合作为路径信息。
21、在一种可能的实现中,还包括:
22、基于所述路径标定信息,生成控制所述机械臂的运动指令;
23、将所述运动指令发送至所述机械臂,控制所述机械臂运动至所述目标点位的所述预设区域范围内。
24、在一种可能的实现中,还包括:当所述目标点位的点位信息还包括机械手的抓取姿态信息时,所述机械臂标定方法还包括:
25、在所述机械臂位于所述目标点位的所述预设区域范围内的情况下,依据所述抓取姿态信息,控制机械手,使所述机械手调整至目标抓取姿态;
26、获取所述机械手在所述目标抓取姿态下,所述机械手上安装的测距传感器发送的距离参数,所述距离参数为表征所述机械手的机械夹爪与目标物体之间位置关系的参数;
27、基于所述距离参数,调整所述机械手的所述机械夹爪,使所述机械夹爪位于所述目标物体的预设位置;
28、将所述机械夹爪位于所述预设位置时的点位信息,确定为所述机械手在所述目标点位的抓取标定信息。
29、在一种可能的实现中,所述基于所述距离参数,调整所述机械手的机械夹爪,使所述机械夹爪位于所述目标物体的预设位置,包括:
30、在所述距离参数至少包括:第一参数、第二参数和第三参数时,判断所述第一参数是否等于预设高度值,其中,所述第一参数为机械夹爪的底侧边缘距离所述标定平台的高度值,所述第二参数为所述机械夹爪的左侧边缘与目标物体之间的距离,所述第三参数为所述机械夹爪的右侧边缘与所述目标物体之间的距离;
31、若所述第一参数不等于预设高度值,则调整所述机械夹爪在第一方向上的坐标参数,直至所述测距传感器发送的所述第一参数等于所述预设高度值,所述第一方向为垂直于所述标定平台的方向;
32、若所述第一参数等于预设高度值,则判断所述第二参数与所述第三参数是否相等;
33、在所述第二参数与所述第三参数不相等的情况下,调整所述机械夹爪在第二方向上的坐标参数,直至所述测距传感器发送的所述第二参数与所述第三参数相等,所述第二方向为在预设高度上平行于所述标定平台的方向;
34、在所述第二参数与所述第三参数相等的情况下,确定所述机械夹爪位于所述目标物体的预设位置。
35、在一种可能的实现中,还包括:
36、响应于所述目标对象对所述机械臂或所述机械手对应的所述路径标定信息或所述抓取标定信息中,任意点位的点位信息的编辑操作,对所述路径标定信息或所述抓取标定信息中的点位信息进行对应的编辑,所述编辑至少包括:添加、修改或删除。
37、本技术第三方面提供了一种机械臂标定装置,应用于所述的机械臂标定系统中的处理器,所述机械臂标定系统至少还包括:标定平台和机械臂,所述机械臂标定装置包括:
38、信息获取单元,用于获取待标定路径的点位信息,所述点位信息至少包括:起始点位和目标点位分别对应的点位信息,所述点位信息至少包括:空间坐标和姿态信息;
39、路径插补单元,用于基于所述起始点位和所述目标点位分别对应的所述点位信息,进行路径插补处理,得到所述机械臂从所述起始点位运动到所述目标点位的预设区域范围内的路径信息,所述路径信息至少包括:至少一个中间点位的点位信息;
40、路径标定单元,用于存储所述路径信息,作为所述机械臂从所述待标定路径的所述起始点位运动到所述目标点位的路径标定信息。
41、本技术实施例提供的机械臂标定系统中,处理器可以根据待标定路径的起始点位和目标点位的点位信息,进行路径插补处理,得到机械臂从起始点位运动到目标点位的中间点位的点位信息,并将中间点位的点位信息作为路径标定信息。
42、对于用户来说,标定机械臂仅需要向处理器输入起始点位和目标点位的点位信息即可,标定过程由服务端自动完成,减少了标定过程中的主观因素的影响。并且,标定平台为机械臂标定了运动空间中每一空间点位的空间坐标,使机械臂在标定或者运动过程中能够精确找到每一中间点的位置,进一步提升了路径标定信息的准确性和标定效率。
- 还没有人留言评论。精彩留言会获得点赞!