一种机器人及其使用方法与流程
本发明涉及船舶保障,具体涉及一种机器人及其使用方法。
背景技术:
1、目前,船舶舱室需要防火或保温,就会在舱室的所有壁面上贴敷隔热材料,如陶瓷棉毯、玻璃棉毯、无机棉毯等,如图1和图2所示。
2、但是现有隔热包覆技术的弊端是:
3、1.需要大量的人力相互合作,施工时间相当长;
4、2.施工时,隔热材料接触到包覆人员裸露的身体部位(如眼睛、鼻腔、皮肤等),容易引起过敏,与隔热棉毯内所释放出的气味一样,引起包覆人员的身体不适;
5、3.包覆时需要使用大量的碰钉104,在隔热层和底材(如舱壁101、船体结构102等)之间会产生大量的空洞和金属接触,并产生冷凝水,造成底材生锈或腐蚀;
6、4.隔热棉毯103与隔热棉毯103之间会产生空隙105,也会造成底材的生锈或腐蚀。
7、因此,设计出一种人工智能的机器人来又快又好地代替人力操作是目前亟待解决的问题。
技术实现思路
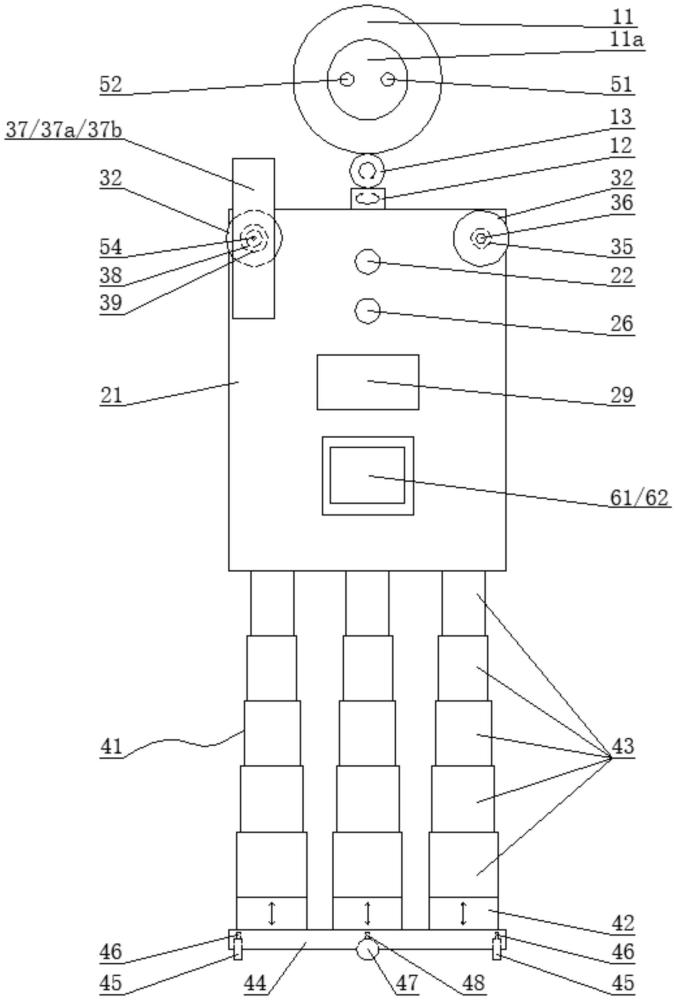
1、鉴于以上所述现有技术的缺点,本发明提供一种机器人,所述机器人包括头单元、身体单元、手臂单元、腿脚单元、监测单元和控制单元;
2、所述头单元包括机器人头,机器人头的正面为机器人脸,机器人脸有两个眼睛,左眼为激光测距仪,右眼为摄像头;左眼用于测量出机器人距离待包覆底材的距离以及待包覆底材的长度和宽度,通过电脑芯片计算出需包覆的面积,并统计包覆用量和计算报价;右眼用于使机器人看到眼前待包覆底材的实际情况;
3、机器人头左侧还有一个温湿度传感器,实时监测待包覆底材房舱内的温、湿度,机器人头的反面后脑勺部位有一个金属网,内有一个电加热器及风扇,其作用是给需包覆底材吹污以及快速吹烘干胶粘剂和隔热层,并在阴冷潮湿的天气里快速升温和提高干燥度;金属网的上端也有一个摄像头,为了当机器人后脑勺对着底材吹风时,也能看到眼前包覆底材的实际情况,金属网的上端还有一个远程点温计,为了实时监测待包覆底材的表面温度。
4、优选地,机器人头与身体单元之间通过横向旋转电机和竖向旋转电机连接;
5、当机器人需要使用激光测距仪测量时,则正面朝向需包覆底材;当机器人需要使用电加热器和风扇时,则反面朝向底材;机器人头的正反面转动是依靠横向旋转电机来实现;
6、竖向旋转电机使机器人具有抬头仰视和低头俯视的功能,对头部的俯仰进行调节。
7、优选地,身体单元包括机器人身体,机器人身体的正面从上至下依次设有带盖注水口、带盖注胶口、带盖投料口和控制触摸屏,正前方上部位两侧各有一个机器人手臂;
8、机器人身体的内部具有水箱、黏稠胶粘剂箱、稀释胶粘剂箱、料箱,带盖注水口、带盖注胶口、带盖投料口分别为水箱、胶粘剂箱、料箱的添加入口;
9、所述水箱通过水管连接至黏稠胶粘剂箱及稀释胶粘剂箱,以将胶粘剂混匀至所需的黏稠度,所述稀释胶粘剂箱配有混合搅拌机,以辅助搅拌;所述稀释胶粘剂箱的底部通过稀释胶粘剂管连通至料箱,料箱内装有隔热纤维,所述料箱还配有用于隔热纤维的粉碎机及用于与来自稀释胶粘剂箱的胶粘剂进行混匀的混合搅拌机,所述料箱的底部通过料管连通至输送管,输送管包括相连的泵前输送管及泵后输送管,泵后输送管与设在机器人左手臂内的可伸缩软管及喷头相连,泵前输送管与泵后输送管之间装有加压泵;所述黏稠胶粘剂箱通过黏稠胶粘剂管也连通至泵前输送管;
10、在底板表面涂覆隔热层时,先将来自黏稠胶粘剂箱的较黏稠的胶粘剂通过喷头喷涂至底材表面,然后将来自料箱的混合了胶粘剂的隔热纤维通过喷头喷涂至底材表面,完成底材涂覆施工。
11、优选地,水箱内安装有电加热器,并且电加热器上有温度计,可根据事先设定的温度要求给水箱内的清水加热;
12、水箱、胶粘剂箱和料箱内安装有仓容传感器,实时监测这三个箱内的液位和用量使用情况,稀释胶粘剂箱和料箱内安装有黏稠度传感器,实时监测稀释胶粘剂箱和料箱内的黏稠度;
13、所述水箱还通过水管连通至料箱,以进行稀释或清洗,所述水箱还通过装有雾化器的水管连通至泵后输送管,以对完成施工后的管路及喷头进行冲洗;
14、所述泵后输送管装有流量传感器、计时器,以对喷涂材料进行用量控制。
15、手臂单元包括左手臂、右手臂、万向旋转电机,万向旋转电机安装于机器人身体正前方上部位两侧,万向旋转电机的另一端连接机器人手臂;
16、左手臂内有一条可伸缩软管,其一端与机器人身体内的泵后输送管连接,穿过万向旋转电机、升缩电机和n节套装的升缩柱,最终在左手臂的末端连接着喷头,将胶粘剂或者隔热纤维喷向需包覆的底材;
17、右手臂的末端是刮平板万向旋转电机,其可使右手臂无论在什么角度,不与需包覆的底材相互垂直的情况下,都能使刮平板与底材相互垂直并贴合良好;刮平板万向旋转电机的前端连接着刮平板旋转电机,其可使机器人视底材的实际情况让刮平板既可横向刮平,又可竖向刮平,或是其他任意角度刮平。
18、优选地,腿脚单元包括底盘,底盘上均布着4个升降电机,每个升降电机上都有一组n节套装的升降柱,四组升降柱的顶端与身体单元固定连接,承托着头单元、身体单元和手臂单元的重量;当待包覆的底材高度超过机器人手臂上的升缩柱伸长的最高高度时,4个升降电机可使四组升降柱升高,方便机器人进行高处的隔热包覆工作;
19、底盘下部左右两侧对称布置有一对前进轮及前进轮驱动电机,前进轮在前进轮驱动电机的驱动下,可前进或后退;
20、底盘下部前后两侧对称布置有一对万向转动轮及万向转动轮旋转电机,万向转动轮在万向转动轮旋转电机的驱动下,能够向左转或向右转;
21、底盘内部有充电锂电池,底盘内部还有定位仪、视觉传感器和激光雷达,帮助机器人的位置移动。
22、优选地,监测单元包括激光测距仪、摄像头、温湿度传感器、远程点温计、超声波测厚仪、流量传感器、计时器、仓容传感器、黏稠度传感器、定位仪、视觉传感器和激光雷达;
23、激光测距仪和摄像头位于机器人头正面的机器人脸上,激光测距仪为左眼,摄像头为右眼;温湿度传感器位于机器人头的左侧,实时监测需包覆底材房舱内的温、湿度;远程点温计也位于金属网的上端,实时监测需包覆底材的表面温度;
24、超声波测厚仪位于刮平板的中央位置,机器人在实施隔热纤维层的刮平工作期间,用于实时监测粘敷在底材上的隔热纤维层的厚度是否符合要求以及是否厚度均匀;
25、流量传感器和计时器位于可伸缩软管前的泵后输送管上;仓容传感器位于水箱、胶粘剂箱和料箱内;黏稠度传感器位于稀释胶粘剂箱和料箱内,实时监测稀释胶粘剂箱和料箱内的黏稠度;定位仪、视觉传感器和激光雷达位于底盘内;激光雷达根据需包覆底材的具体动态位置实时规划机器人的行走路径,定位仪实时监测机器人的位置信息,视觉传感器实时监测地面信息。
26、优选地,控制单元与头单元、身体单元、手臂单元、腿脚单元和监测单元连接,并对这些单元的工作进行控制及对其运行状态进行监控;
27、控制单元包括电脑芯片、控制触摸屏和用户终端;电脑芯片和控制触摸屏一起安装在机器人身体的正前方下端,控制触摸屏位于外露部位,电脑芯片位于控制触摸屏的内侧;用户能够在控制触摸屏上操作,或者在机器人进行施工作业时在房舱的外部通过用户终端进行远程操作。
28、本发明还提供一种所述的机器人的使用方法,包括如下步骤:
29、s1:机器人通过激光测距仪,精确地测量出待包覆底材的长度和宽度,通过电脑芯片计算出需包覆的面积,并根据用户事先输入的包覆厚度统计包覆材料的用量和计算报价;
30、s2:用户根据机器人统计出材料的用量,先将机器人身体内部的水箱、胶粘剂箱和料箱装填好;胶粘剂箱内装的是具有阻燃、耐高温功能的胶粘剂,料箱内装的是隔热材料;装满后用户就可以在控制触摸屏或者跑到需包覆底材舱室的外面通过用户终端进行远程控制了;
31、s3:当远程点温计监测到需包覆底材的表面温度低于0℃,或者当温湿度传感器监测到需包覆底材房舱内的温度低于0℃或者相对湿度高于80%时,机器人视情将头内的电加热器打开,或者电加热器和风扇同时打开;
32、s4:粉碎机将隔热材料粉碎成纤维状;
33、s5:机器人用打磨板先轻轻打磨需包覆底材的表面,打磨掉表面上黏附的垃圾、油脂及污垢,使底材表面更容易挂胶;
34、s6:机器人再用清洁板清洁底材表面,使其无灰尘;
35、s7:机器人打开黏稠胶粘剂箱后面的黏稠胶粘剂管上的电动阀,使较粘稠的胶粘剂通过泵前输送管、加压泵、泵后输送管、机器人左手臂内的可伸缩软管和手臂末端的喷头,喷向需包覆底材的表面;
36、s8:机器人打开水箱后面的水管上的电动阀,根据事先输入的黏稠度要求,给稀释胶粘剂箱注入一定量的清水,并打开稀释胶粘剂箱内的混合搅拌机进行搅拌,同时通过稀释胶粘剂箱内的黏稠度传感器实时监测混合后胶粘剂的黏稠度,直到黏稠度达到要求,关闭水管上的电动阀;
37、s9:接着,机器人打开稀释胶粘剂箱后面的稀释胶粘剂管上的电动阀,根据事先输入的黏稠度要求,给料箱注入一定量的稀释胶粘剂,并打开料箱内的混合搅拌机进行搅拌,同时通过料箱内的黏稠度传感器实时监测混合后隔热纤维的黏稠度,直到黏稠度达到要求,关闭稀释胶粘剂管上的电动阀;
38、s10:机器人打开料箱后面的料管上的电动阀,使混合了胶粘剂的隔热纤维通过泵前输送管、来到了加压泵加压;与此同时,机器人打开水箱后面的水管上的电动阀,使清水经过雾化器雾化;当雾化后的细水雾来到泵后输送管与加压后的隔热纤维相遇,再经过机器人左手臂内的可伸缩软管和手臂末端的喷头,喷向已喷过底胶的底材表面;当机器人喷涂平面时,由下至上逐步喷涂;当喷到船体结构时,先喷该结构的内侧,再喷其外侧和四周。
39、优选地,还包括如下步骤:
40、s11:当隔热纤维喷涂完毕,机器人打开头单元的电加热器和风扇,升高温度和加速空气流动,等隔热纤维表面稍微固化后,机器人开始用右手臂上的刮平板给底材表面的隔热纤维层刮平;机器人视底材的实际情况让刮平板横向刮平或竖向刮平,或是其他任意角度刮平;由于刮平板的中央位置有超声波测厚仪,机器人在实施隔热纤维层的刮平工作期间,其可根据用户事先输入控制单元中的厚度要求实时监测粘敷在底材上的隔热纤维层的厚度是否符合要求以及是否厚度均匀,做到隔热纤维层的平整度、厚度保持一致和美观;
41、s12:机器人打开头单元的电加热器和风扇,升高温度和加速空气流动,等过了事先设定的时间,隔热纤维表面固化后,机器人重复步骤s7,给底材上的隔热纤维层喷较粘稠的胶粘剂进行封闭;
42、s13:机器人再次打开头单元的电加热器和风扇,升高温度和加速空气流动,等过了事先设定的时间,胶粘剂表面固化后,完成隔热包覆工作;
43、s14:机器人先打开水箱内的电加热器,待水温达到设定要求后,机器人打开水箱后面的水管、和上的三个电动阀,给黏稠胶粘剂箱、稀释胶粘剂箱和料箱注水清洗,待这三个箱体内浸泡完事先设定的时间后,机器人再打开黏稠胶粘剂管、稀释胶粘剂管和料管上的三个电动阀,将清洗后的脏水通过可伸缩软管和/或喷头排入事先准备好的污水桶内,清洗干净后,以备下次隔热包覆工作使用;
44、s15:用户给清洗后的料箱内加入阻燃布浆料,并且给清洗后的黏稠胶粘剂箱加入阻燃白漆,然后就离开该舱室,到外面通过用户终端进行远程控制;
45、s16:机器人打开料箱后面的料管上的电动阀,使阻燃布浆纤维通过输送管、加压泵、可伸缩软管、喷头对隔热层表面进行喷涂;该步骤在步骤s12后、步骤s13前进行,使得在胶粘剂的作用下,阻燃布浆纤维能完全黏附在隔热层的表面;
46、s17:当阻燃布浆纤维喷涂完毕,机器人打开电加热器和风扇,升高温度和加速空气流动,等阻燃布浆纤维表面稍微固化后,机器人开始用右手臂上的刮平板给阻燃布浆纤维层刮平;
47、s18:机器人打开电加热器和风扇,升高温度和加速空气流动,等阻燃布浆纤维表面完全固化后,再打开黏稠胶粘剂箱后面的黏稠胶粘剂管上的电动阀,使阻燃白漆通过输送管、加压泵、可伸缩软管和手臂末端的喷头,喷向阻燃布浆纤维的表面;
48、s19:待阻燃白漆被机器人烘干后,完成喷涂工作。
49、如上所述,本发明提供一种机器人及其使用方法,该机器人代替了人工操作,大大解放了人力和缩短工时;不仅可以给舱壁、天花板及其上的船体结构进行隔热包覆,还可以给舱室内(如风管、水管等)的管道进行隔热包覆;不仅可用于船舶,还可用于陆地建筑和航空航天,使用范围广;施工作业时,避免了人员接触对身体不良的有害因素;使底材的保温、抗冷凝和隔音的效果更好;并且不会造成底材生锈或腐蚀。该人工智能所带来的安全性、经济性、科学性以及环保性具有划时代里程碑的意义。本发明有效克服了现有技术中的种种缺点并具有高度产业利用的价值。
- 还没有人留言评论。精彩留言会获得点赞!