一种面部表情分析机器人
本发明涉及机器人,具体为一种面部表情分析机器人。
背景技术:
1、面部表情是指通过眼部肌肉、颜面肌肉和口部肌肉的变化来表现各种情绪状态。人工智能改变了人们的生活,在许多领域中,需要对人们面部进行识别,面部表情的分析也越来越重要,
2、现有的面部表情分析机器人存在以下问题:
3、现有的面部表情分析机器人上识别摄像头的角度调节较为简单,不能跟随人脸的面向角度进行精确调整,导致收集到的面部表情失真,会造成面部表情分析效果不够准确,在机器人移动和定位方面也不够方便,且不便于对识别分析装置进行拆卸和维修,为此,我们提出一种面部表情分析机器人。
技术实现思路
1、本发明的目的在于提供一种面部表情分析机器人,以解决上述背景技术中提出的问题。
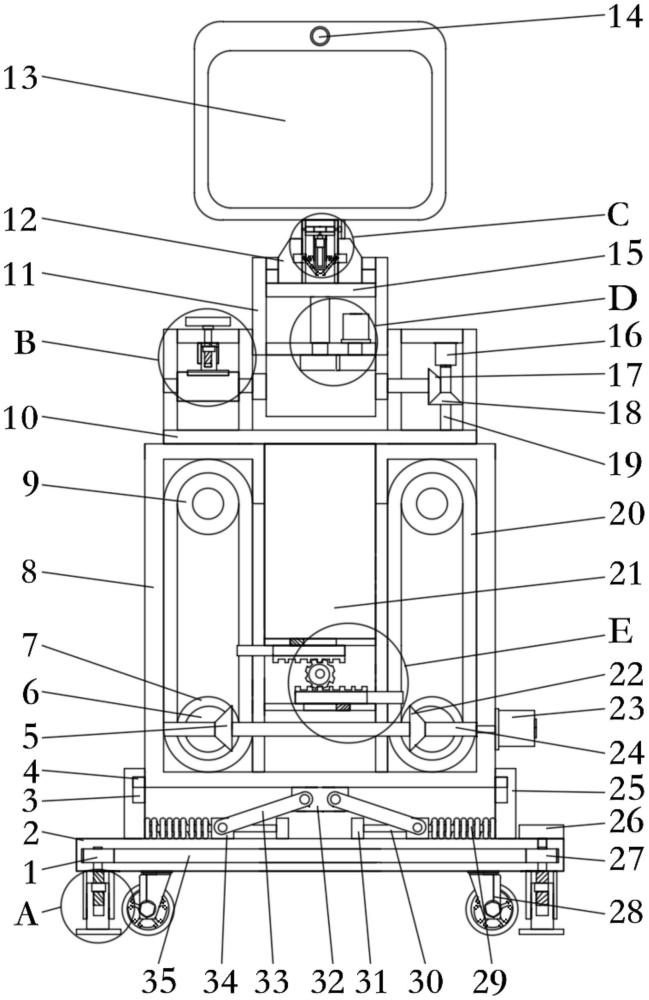
2、为实现上述目的,本发明提供如下技术方案:一种面部表情分析机器人,包括支撑底板、箱体和摄像头,所述支撑底板底部的左右两侧均设置有万向轮,所述支撑底板的上方设置有限位框架,所述限位框架内部下方的左右两侧均设置有活动滑杆,所述活动滑杆远离限位框架内壁的一侧设置有第一固定块,所述活动滑杆的中间套设有活动滑套,所述活动滑套远离第一固定块的一侧设置有缓冲弹簧,所述活动滑套的上方设置有活动杆,两侧所述活动杆的上端设置有第二固定块,所述第二固定块的上方设置有箱体,所述箱体左右两侧的下方设置有活动滑块,所述活动滑块的外部套设有活动滑槽;
3、所述箱体内部左右两侧的上方均设置有第三链轮,所述第三链轮的下方设置有第二链轮,所述第二链轮和第三链轮的外部套设有第一链条,所述第二链轮的前端设置有第二伞齿轮,左侧所述第二伞齿轮的右侧设置有第一伞齿轮,右侧所述第二伞齿轮的左侧设置有第五伞齿轮,所述第一伞齿轮和第五伞齿轮的内部穿设有第二转动轴,所述第二转动轴的输入端设置有第二伺服电机;
4、所述活动板的上方设置有支撑横板,所述支撑横板上方的中间设置有活动框架,所述活动框架的左右两侧均设置有固定箱,左侧所述固定箱的上方设置有第二转柄,所述第二转柄的下方设置有第二竖向丝杆,所述第二竖向丝杆的上方套设有第二丝杆套柱,所述第二丝杆套柱的外部套设有第二活动柱,所述第二活动柱的外部套设有第二固定柱,所述第二活动柱的下方设置有限位齿块,所述限位齿块的下方设置有限位齿轮,右侧所述固定箱内部的上方设置有第一伺服电机,所述第一伺服电机的下方设置有第一转动轴,所述第一转动轴的中间设置有第四伞齿轮,所述第四伞齿轮的左侧设置有第三伞齿轮;
5、所述活动框架内部的中间设置有隔板,所述隔板上方的右侧设置有第三伺服电机,所述第三伺服电机的下方设置有主动齿轮,所述主动齿轮的左侧设置有同轴齿轮,所述同轴齿轮的上方设置有第三转动轴,所述第三转动轴的上方设置有转动板,所述转动板的上方设置有固定座;
6、所述固定座的内部设置有安装箱,所述安装箱的上方设置有显示屏,所述显示屏前端的上方设置有摄像头,所述安装箱右侧的上方设置有第三转柄,所述第三转柄的左侧设置有活动蜗杆,所述活动蜗杆的前端设置有活动蜗轮,所述活动蜗轮的下方设置有第三竖向丝杆,所述第三竖向丝杆的上方套设有第三丝杆套柱,所述第三丝杆套柱的外部套设有第三活动柱,所述第三活动柱的外部套设有第三固定柱,所述第三固定柱左右两侧的下方均设置有限位弹簧,所述限位弹簧远离第三固定柱的一侧设置有限位杆,所述限位杆的中间穿设有定位销轴,所述限位杆上端的内壁开设有活动销槽,所述活动销槽的内部设置有活动滑销,所述活动滑销远离限位弹簧的一侧设置有连接杆,所述连接杆远离活动滑销的一侧设置有限位块,所述有限位块的外部套设有限位槽。
7、优选的,所述箱体与活动滑块固定连接,所述活动滑块与活动滑槽局部适配,所述箱体与第二固定块固定连接,所述第二固定块与活动滑套之间通过活动杆活动连接,所述活动滑套与活动滑杆局部适配,所述活动滑杆与第一固定块固定连接,所述活动滑套与限位框架之间通过缓冲弹簧弹性连接。
8、优选的,所述第二伺服电机与第二转动轴固定连接,所述第二转动轴与第一伞齿轮和第五伞齿轮固定连接,所述第一伞齿轮和第五伞齿轮分别与对应的第二伞齿轮啮合连接,所述第一伞齿轮和第五伞齿轮方向相反,所述第二伞齿轮与第二链轮固定连接,所述第二链轮与第三链轮之间通过第一链条链传动。
9、优选的,所述第二转柄与第二竖向丝杆固定连接,所述第二竖向丝杆与第二丝杆套柱螺纹配合,所述第二丝杆套柱与第二活动柱固定连接,所述第二活动柱与限位齿块固定连接,所述限位齿块与限位齿轮局部适配,所述限位齿轮与活动框架固定连接,所述第一伺服电机与第一转动轴固定连接,所述第一转动轴与第四伞齿轮固定连接,所述第四伞齿轮与第三伞齿轮啮合连接,所述第三伞齿轮与活动框架固定连接。
10、优选的,所述第三伺服电机与主动齿轮固定连接,所述主动齿轮与同轴齿轮啮合连接,所述同轴齿轮与第三转动轴固定连接,所述第三转动轴与转动板固定连接,所述转动板与固定座固定连接。
11、优选的,所述第三转柄与活动蜗杆固定连接,所述活动蜗杆与活动蜗轮啮合连接,所述活动蜗轮与第三竖向丝杆固定连接,所述第三竖向丝杆与第三丝杆套柱螺纹配合,所述第三丝杆套柱与第三活动柱固定连接,所述第三活动柱与第三固定柱局部适配,所述第三固定柱与限位杆之间通过限位弹簧弹性连接,所述限位杆与安装箱之间通过定位销轴活动销接,所述活动滑销与活动销槽局部适配,所述活动滑销与连接杆固定连接,所述连接杆与限位块固定连接,所述限位块与限位槽局部适配。
12、优选的,所述活动板前端的下方设置有第四伺服电机,所述第四伺服电机的后端设置有活动齿轮,所述活动齿轮的上下两方均设置有活动齿条,所述活动齿条远离活动齿轮的一侧设置有活动横杆,所述活动横杆靠近第一链条的一侧设置有嵌位块,所述活动横杆远离活动齿轮的一侧设置有固定横杆,所述固定横杆靠近活动横杆的一侧开设有限位滑槽,所述限位滑槽内部的中间设置有限位滑块。
13、优选的,所述第四伺服电机与活动齿轮固定连接,所述活动齿轮与活动齿条啮合连接,所述活动齿条与活动横杆固定连接,所述活动横杆与嵌位块固定连接,所述活动横杆与限位滑块固定连接,所述限位滑块与限位滑槽局部适配。
14、优选的,所述支撑底板上方的右侧设置有第一转柄,所述支撑底板内部的右侧设置有第四链轮,所述支撑底板内部的左侧设置有第一链轮,所述第一链轮和第四链轮的外部套设有第二链条,所述第一链轮和第四链轮的下方均设置有第一竖向丝杆,所述第一竖向丝杆的上方套设有第一丝杆套柱,所述第一丝杆套柱的外部套设有第一活动柱,所述第一活动柱的下方设置有定位板,所述第一活动柱的外部套设有第一固定柱。
15、优选的,所述第一转柄与第四链轮固定连接,所述第四链轮与第一链轮之间通过第二链条链传动,所述第一链轮和第四链轮分别与其下方第一竖向丝杆固定连接,所述第一竖向丝杆与第一丝杆套柱螺纹配合,所述第一丝杆套柱与第一活动柱固定连接,所述第一活动柱与定位板固定连接。
16、与现有技术相比,本发明的有益效果是:
17、本发明箱体在移动的过程中对下给出压力,使得活动滑块在活动滑槽中竖向移动,可使得活动杆向下移动,并带动活动滑套在活动滑杆上向缓冲弹簧方向移动,并将缓冲弹簧压缩,在缓冲弹簧的弹力作用下,给箱体起到一定支撑减震作用,减少设备受损,延长使用寿命。
18、本发明经第二伺服电机的作用,第二转动轴带动第一伞齿轮和第五伞齿轮转动,带动两侧第二伞齿轮转动,带动第二链轮转动,并通过第一链条带动第三链轮转动,可改变活动板的竖向位置,方便根据人脸的高度调节显示屏和摄像头的高度。
19、本发明经第一伺服电机的作用,第一转动轴带动第四伞齿轮转动,带动第三伞齿轮转动,并通过限位齿轮的配合,带动活动框架转动,以此调节显示屏和摄像头的角度,调整完毕后,转动第二转柄,第二竖向丝杆转动使得第二丝杆套柱竖向移动,并使得第二活动柱在第二固定柱内向下移动,使得限位齿块嵌入限位齿轮的齿口,完成对活动框架的角度限制。
20、本发明经第三伺服电机的作用,主动齿轮带动同轴齿轮转动,使得第二转动轴带动转动板以及固定座转动,可使得显示屏和摄像头左右转动,以此根据人脸位置调整到合适的拍摄角度。
21、本发明转动第三转柄,活动蜗杆带动活动蜗轮转动,带动第三竖向丝杆转动,使得第三丝杆套柱竖向移动,并带动第三活动柱在第三固定柱内竖向移动,当第三活动柱向下推动限位杆的下端,限位杆围绕定位销轴转动,使得活动滑销带动连接杆以及限位块向限位弹簧一侧移动,并将限位弹簧压缩,活动滑销在活动销槽中向下移动,直到限位块远离限位槽,可将安装箱取出,安装时,转动第三转柄使得第三活动柱远离限位杆,在限位弹簧的弹力作用下,限位杆通过连接杆推动限位块嵌入限位槽中,完成限位固定,此结构方便对机器人进行维修清理。
22、本发明经第四伺服电机的作用,活动齿轮带动上下两方的活动齿条相互靠近或远离,使得活动横杆在限位滑块和限位滑槽的配合下横向移动,并改变嵌位块的横向位置,调节完显示屏的高度后,使得嵌位块嵌入第一链条的链环中,完成位置固定。
23、本发明转动第一转柄,第四链轮通过第二链条带动第一链轮同时转动,带动第一竖向丝杆转动,使得第一丝杆套柱带动第一活动柱在第一固定柱内竖向移动,以及改变定位板的竖向位置,当定位板向下与地面接触,则对机器人的移动进行限制,防止机器人随万向轮的滚动而移动位置。
- 还没有人留言评论。精彩留言会获得点赞!