本发明属于机器人技能学习,具体涉及一种计及机器人末端姿态的技能学习方法及系统。
背景技术:
1、制造业的转变对机器人的智能化水平要求越来越高,现有的基于固定编程的工业机器人已经逐渐难以满足当前的生产制造需求,需要开发出更加灵活,具备自主适应能力的生产系统。人-机技能传递技术是解决上述问题的一种行而有效的策略,其是在示教编程的基础上发展而来的,将机器人或人的工作能力抽象为一种“技能”,将人的技能经过建模和通用化表示后传递给机器人,从而实现高效的机器人的编程和运动规划。
2、人-机技能传递技术经过四十几年的发展,虽然取得了长足的进步,但仍有一些问题没有得到解决。主要存在以下缺陷:(1)传统的基于示教器的编程要求操作人员有一定的编程基础,编程成本高。(2)仅局限于二维平面,未考虑三维空间的机器人末端姿态。(3)机器人在整个生产环节的智能化较低,机器人技能的泛化能力低,一次编程机器人只能完成特定的任务,不能根据环境变化做出改变。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种计及机器人末端姿态的技能学习方法及系统,将二维的平面任务拓展到三维空间,机器人可以更加精确的技能复现以及多个维度的技能泛化。
2、本发明提供了如下的技术方案:
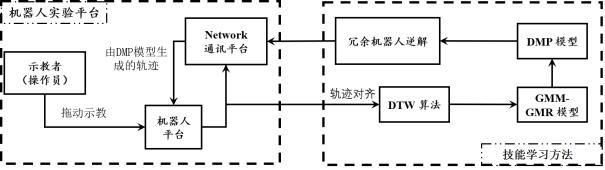
3、第一方面,提供一种计及机器人末端姿态的技能学习方法,包括:获取多组示教数据,每组示教数据中包括所述机器人末端的笛卡尔坐标和机器人末端姿态;基于多组所述示教数据,通过dtw算法对齐示教数据,得到示教样本;基于所述示教样本,通过gmm-gmr模型的聚类和回归得到理想示教轨迹;通过dmp模型对所述理想示教轨迹进行编码,得到任务轨迹;基于所述任务轨迹,驱动所述机器人完成技能的复现或泛化。
4、作为本发明的一种可选的技术方案,所述基于多组所述示教数据,通过dtw算法对齐示教数据,包括:将多组所述示教数据中一组序列作为模板时间序列;通过所述dtw算法对其他序列进行压缩或伸长,直至找到一条最短规整路径使得模板时间序列与其他序列对应点之间的累加距离达到最小;将所有序列对齐后得到所述示教样本。
5、作为本发明的一种可选的技术方案,所述基于所述示教样本,通过gmm-gmr模型的聚类和回归得到理想示教轨迹,包括:
6、通过gmm模型对所述示教样本进行聚类,其包括:
7、所述示教样本中的每个样本为一个状态-动作对,其中,表示机器人的状态数据,表示机器人的动作数据,
t表示共有
t个序列,
t表示第
t个序列;
8、将所述示教样本输入gmm模型,得到概率密度函数,表示为:
9、 (1)
10、其中,
k表示gmm模型中共有
k个高斯函数,
k表示第
k个高斯函数,
n表示高斯分布的概率密度,表示第
k个高斯函数的权重,表示第
k个高斯函数协方差矩阵,表示第
k个高斯函数的均值;
11、通过em算法得到一组最优的gmm参数,表示为:
12、 (2)
13、基于式(2),得到gmm模型最大化的对数似然性,表示为:
14、 (3)
15、其中,表示第
k个高斯函数的方差。
16、作为本发明的一种可选的技术方案,所述基于所述示教样本,通过gmm-gmr模型的聚类和回归得到理想示教轨迹,还包括:
17、通过gmr模型得到所述机器人的行为动作,其包括:
18、对于给定的状态空间和行为空间的条件概率分布表示为:
19、 (4)
20、其中,表示拟合得到的高斯函数的均值,表示拟合得到的高斯函数的方差;
21、行为空间的期望表示为:
22、 (5)
23、表示为: (6)
24、其中,表示机器人行为动作的变体。
25、作为本发明的一种可选的技术方案,所述机器人末端的笛卡尔坐标三个维度分别表示为、、;所述机器人末端姿态三个维度分别表示为
roll、
pitch、
yaw。
26、作为本发明的一种可选的技术方案,所述通过dmp模型对所述理想示教轨迹进行编码,包括:
27、通过所述dmp模型为所述理想示教轨迹中、、、
roll、
pitch、
yaw六个维度进行一组建模,然后使用同一个正则系统使六个dmp模型同步,将所述理想示教轨迹编码为能够记录轨迹形状的非线性强迫项中高斯基函数的权重值,其中dmp公式表示为:
28、 (7)
29、其中,
y表示任务轨迹,和分别表示
y的一阶导数和二阶导数,
g表示理想期望轨迹,和表示常数;
30、
f表示用于学习所述理想期望轨迹形状的非线性强迫项,其表示为:
31、 (8)
32、其中,
x表示相位项,表示第
k个高斯基函数,表示起始点;
33、高斯基函数表示为:
34、 (9)
35、其中,和分别表示第
k个高斯函数的中心和宽度。
36、作为本发明的一种可选的技术方案,基于式(8),需要找到一组权重项使任务轨迹与理想期望轨迹之间误差最小,此时为最理想状态,此时的非线性强迫项为最理想状态下的非线性强迫项,表示为: (10)
37、其中,表示最理想状态下轨迹的二次导数;
38、基于式(10),权重项表示为:
39、 (11)
40、其中,表示通过高斯基函数拟合得到的非线性强迫项,表示与时间有关的变量,表示取和最小时的。
41、作为本发明的一种可选的技术方案,所述基于所述任务轨迹,驱动所述机器人完成技能的复现或泛化,包括:将不同的起点和终点输入dmp模型中,通过正则系统的相位项驱动非线性强迫项
f,dmp模型产生与理想示教轨迹动作形状相同的任务轨迹,并泛化出机器人各关节的关节角值,控制机器人技能的复现与泛化。
42、第二方面,提供一种用于机器人技能复现的柔顺控制系统,包括:
43、获取模块,用于获取多组示教数据,每组示教数据中包括所述机器人末端的笛卡尔坐标和机器人末端姿态;
44、对齐模块,用于基于多组所述示教数据,通过dtw算法对齐示教数据,得到示教样本;
45、转换模块,用于基于所述示教样本,通过gmm-gmr模型的聚类和回归得到理想示教轨迹;
46、编码模块,用于通过dmp模型对所述理想示教轨迹进行编码,得到任务轨迹;
47、驱动模块,用于基于所述任务轨迹,驱动所述机器人完成技能的复现或泛化。
48、与现有技术相比,本发明的有益效果是:
49、本发明提供的一种计及机器人末端姿态的技能学习方法考虑到机器人技能复现过程中的末端姿态,将欧拉角也作为示教数据,将二维的平面任务拓展到三维空间,使得机器人可以更加精确的技能复现以及多个维度的技能泛化;不需要操作人员有编程基础,只要进行拖动示教即可。