工件定位方法及装置、设备与流程
本技术实施例涉及工件定位,涉及但不限于一种工件定位方法及装置、设备。
背景技术:
1、在工业产品的生产过程中,工件会根据生产需求被安置于不同的工位。为了提高生产效率,在现代化生产线广泛采用机械臂技术,以将工件从一个工位移动至另一工位进行必要的加工处理,并在加工处理完成后将工件重新放回原工位或继续转移至下一工位,确保生产流程的顺畅进行。然而,由于工件在工位间移动时,其摆放位置可能产生偏差,可能造成机械臂抓取工件后无法准确放置在指定加工的工位。因此,对工件进行精确的定位成为实现高效、准确移动操作的关键环节。
技术实现思路
1、有鉴于此,本技术实施例公开了一种工件定位方法及装置、设备。本技术实施例提供的工件定位方法及装置、设备是这样实现的:
2、本技术实施例提供的工件定位方法,包括:
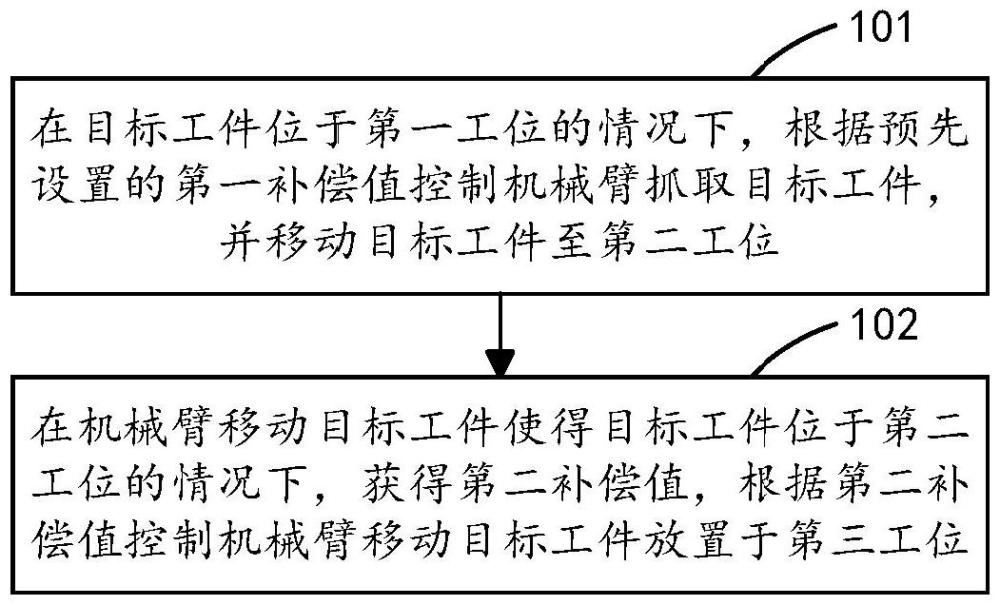
3、在目标工件位于第一工位的情况下,根据预先设置的第一补偿值控制机械臂抓取所述目标工件,并移动所述目标工件至第二工位;
4、在所述机械臂移动所述目标工件使得所述目标工件位于所述第二工位的情况下,获得第二补偿值,根据所述第二补偿值控制所述机械臂移动所述目标工件放置于第三工位。
5、在一些实施例中,所述在目标工件位于第一工位的情况下,根据预先设置的第一补偿值控制机械臂抓取所述目标工件,并移动所述目标工件至第二工位,包括:
6、在所述目标工件位于第一工位的情况下,通过第一摄像头采集包括所述目标工件的第一图像,所述第一摄像头设置于距离所述第一工位所在平面第一预设距离的位置;
7、根据所述第一图像,获取所述目标工件在所述第一图像中对应的第一像素坐标信息;
8、根据所述第一像素坐标信息和预设的第一补偿值,控制机械臂抓取所述目标工件,并移动所述目标工件至第二工位,所述第一补偿值用于指示所述机械臂在所述第一工位抓取所述目标工件的校正位移。
9、在一些实施例中,所述在所述机械臂移动所述目标工件使得所述目标工件位于所述第二工位的情况下,获得第二补偿值,根据所述第二补偿值控制所述机械臂移动所述目标工件放置于所述第三工位,包括:
10、在所述机械臂移动所述目标工件使得所述目标工件位于第二工位的情况下,通过第二摄像头采集包括所述目标工件的第二图像,所述第二摄像头设置于距离所述第二工位所在平面第二预设距离的位置,所述第二预设距离小于所述第一预设距离;
11、根据所述第二图像,获取所述目标工件在所述第二图像中对应的第二像素坐标信息;
12、根据所述第二像素坐标信息和预设的模板像素坐标信息,获取所述第二补偿值,所述第二补偿值用于指示所述机械臂将所述目标工件放置在第三工位的校正位移,所述预设的模板像素坐标信息为所述机械臂抓取样本工件的预设位置的情况下,通过所述第二摄像头得到的所述样本工件在所述第二工位的像素坐标信息;
13、根据所述第二补偿值控制所述机械臂移动所述目标工件放置于所述第三工位。
14、在一些实施例中,所述预设的第一补偿值是通过计算多个样本工件在所述第一工位对应的样本机械臂坐标信息与所述多个样本工件对应的模板机械臂坐标信息的差值求平均值确定的,所述样本机械臂坐标信息为在所述多个样本工件位于所述第一工位情况下,所述多个样本工件在机械臂坐标系下的坐标信息,所述模板机械臂坐标信息为在所述机械臂抓取所述多个样本工件的所述预设位置情况下,所述机械臂在所述机械臂坐标系下的坐标信息。
15、在一些实施例中,所述第二工位为所述机械臂从所述第一工位移动工件至所述第三工位过程中的预设平面区域,所述第二摄像头的光轴与所述第二工位所在平面垂直,所述第一图像包括所述目标工件的全部图像内容,所述第二图像包括所述目标工件的至少部分图像内容。
16、在一些实施例中,所述第一像素坐标信息包括所述目标工件在所述第一图像中的第一像素横坐标、第一像素纵坐标以及第一倾斜角度,所述根据所述第一图像,获取所述目标工件在所述第一图像中对应的第一像素坐标信息,包括:
17、对所述第一图像进行图像处理,得到所述目标工件在所述第一图像中对应的轮廓信息,所述图像处理包括灰度化处理、二值化处理以及轮廓获取处理;
18、根据所述轮廓信息和预设的特征点,确定所述第一像素横坐标和所述第一像素纵坐标,所述预设的特征点包括所述目标工件的中心点或预设顶点;
19、根据所述轮廓信息和预设的特征提取条件,确定所述目标工件对应的至少两个特征区域,所述预设的特征提取条件包括范围区间和/或比例阈值;
20、根据所述至少两个特征区域分别对应的中心点与参考直线的夹角,确定所述第一倾斜角度,所述参考直线为所述第一图像中的水平线或垂直线。
21、在一些实施例中,所述第二像素坐标信息包括所述目标工件在所述第二图像中的第二像素横坐标、第二像素纵坐标以及第二倾斜角度,所述目标工件为手机中框,根据所述第二图像,获取所述目标工件在所述第二图像中对应的第二像素坐标信息,包括:
22、根据所述第二图像中所述目标工件的第一边延伸后的第一直线和第二边延伸后的第二直线的交点位置,确定所述第二像素横坐标和第二像素纵坐标,所述第一直线与所述第二直线相互垂直;
23、根据所述第一直线和/或所述第二直线与参考直线的夹角,确定所述第二倾斜角度,所述参考直线为所述第二图像中的水平线或垂直线。
24、在一些实施例中,所述根据所述第二像素坐标信息和预设的模板像素坐标信息,获取所述第二补偿值,包括:
25、根据预设的第二坐标映射关系,确定所述第二像素坐标对应的第二机械臂坐标和所述模板像素坐标信息对应的机械臂坐标信息,所述第二坐标映射关系包括在所述第二工位内预设像素坐标和预设机械臂坐标之间的映射关系;
26、计算所述第二机械臂坐标与所述模板像素坐标信息对应的机械臂坐标信息之间的差值,得到所述第二补偿值。
27、本技术实施例提供的工件定位装置,包括:
28、第一控制模块,用于在目标工件位于第一工位的情况下,根据预先设置的第一补偿值控制机械臂抓取所述目标工件,并移动所述目标工件至第二工位;
29、第二控制模块,用于在所述机械臂移动所述目标工件使得所述目标工件位于所述第二工位的情况下,获得第二补偿值,根据所述第二补偿值控制所述机械臂移动所述目标工件放置于第三工位。
30、本技术实施例提供的计算机设备,包括存储器和处理器,所述存储器存储有可在处理器上运行的计算机程序,所述处理器执行所述程序时实现本技术实施例所述的方法。
31、本技术实施例所提供的工件定位方法、装置和计算机设备,至少包括以下
32、有益效果:
33、通过将目标工件从第一工位抓取并移动到第二工位的第一次调整,和将目标工件从第二工位移动并放置到第三工位的第二次调整,本技术对目标工件的位置进行了两次位置调整后,将其放置于进行后续加工处理的第三工位。相较于传统技术中通过一次较大幅度调整可能因机械臂的固有误差而影响工件放置精度的问题。本技术的第一次调整依据预先设置的第一补偿值,定位及调整处理效率高。获取第二补偿值进行第二次调整,该次调整时对目标工件的调整幅度小于只进行一次调整时的调整幅度,受机械臂的固有误差或调整过程中可能存在的测量误差的影响较小,提高了工件定位及移动的准确性,同时一定程度上降低了对工件定位及移动过程中所需的设备的精度要求。
- 还没有人留言评论。精彩留言会获得点赞!