本技术涉及新能源汽车,特别是涉及一种障碍物测距方法、电动车门控制方法、装置和系统。
背景技术:
1、随着用户对新能源汽车的便利性的要求越来越高,电动车门应运而生。然而,电动车门在提高便利性的同时,也因为其自动性带来安全隐患。例如,当车辆附近存在障碍物且障碍物与车身之间的距离较近时,电动车门全开后会与障碍物发生碰撞。
2、目前,现有的电动车门控制方式通过检测车辆附近的障碍物以及障碍物与车身之间的距离,计算车辆不会与障碍物发生碰撞的最佳车门开启角度,进而按照最佳车门开启角度控制电动车门。
3、然而,现有的障碍物检测方式主要依赖于电动车门自身配备的单一传感器,如毫米波传感器。由于单一传感器的检测范围有限,难以覆盖车辆附近的所有障碍物,如低矮或悬空的障碍物等,使得障碍物与车身之间的距离检测不够精准,进而导致电动车门开启后可能与障碍物发生碰撞。
技术实现思路
1、基于此,提供一种障碍物测距方法、电动车门控制方法、装置和系统,以提高障碍物与车身之间的距离检测精准度。
2、第一方面,提供一种障碍物测距方法,所述方法包括:
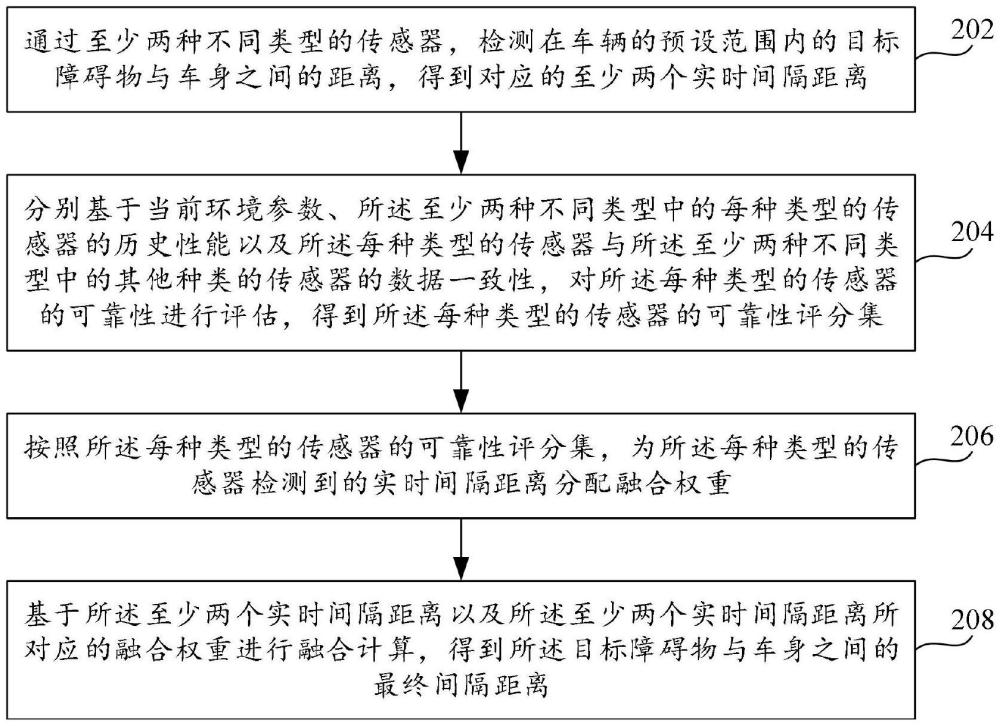
3、通过至少两种不同类型的传感器,检测在车辆的预设范围内的目标障碍物与车身之间的距离,得到对应的至少两个实时间隔距离;
4、分别基于当前环境参数、所述至少两种不同类型中的每种类型的传感器的历史性能以及所述每种类型的传感器与所述至少两种不同类型中的其他种类的传感器的数据一致性,对所述每种类型的传感器的可靠性进行评估,得到对应的可靠性评分集;
5、按照所述每种类型的传感器的可靠性评分集,为所述每种类型的传感器检测到的实时间隔距离分配融合权重;
6、基于所述至少两个实时间隔距离以及所述至少两个实时间隔距离所对应的融合权重进行融合计算,得到所述目标障碍物与车身之间的最终间隔距离。
7、结合第一方面,在第一方面的第一种可实施方式中,分别基于当前环境参数、所述至少两种不同类型中的每种类型的传感器的历史性能以及所述每种类型的传感器与所述至少两种不同类型中的其他种类的传感器的数据一致性,对所述每种类型的传感器的可靠性进行评估,得到对应的可靠性评分集,包括:
8、获取当前光照强度、当前温度和当前湿度中的至少一项作为所述当前环境参数,根据所述当前环境参数和预设的环境适应参数的匹配情况,对所述至少两种不同类型中的每种类型的传感器的可靠性进行评估,得到所述每种类型的传感器的环境适应性评分;
9、其中,所述环境适应参数包括光照强度适应范围、温度适应范围和湿度适应范围中的至少一项;
10、获取所述至少两种不同类型中的每种类型的传感器的历史检测准确率作为所述每种类型的传感器的历史性能,根据所述每种类型的传感器的历史检测准确率对所述每种类型的传感器的可靠性进行评估,得到所述每种类型的传感器的历史性能评分;
11、根据所述至少两种不同类型中的每种类型的传感器与所述至少两种不同类型中的其他类型的传感器检测到的实时间隔距离的差值,确定所述每种类型的传感器与所述其他类型的传感器的数据一致性,根据所述每种类型的传感器与所述其他类型的传感器的数据一致性和预设的数据阈值的匹配情况,对所述每种类型的传感器的可靠性进行评估,得到所述每种类型的传感器的数据一致性评分;
12、其中,所述每种类型的传感器的可靠性评分集包括所述每种类型的传感器的环境适应性评分、历史性能评分和数据一致性评分。
13、结合第一方面的第一种可实施方式,在第一方面的第二种可实施方式中,根据所述当前环境参数和预设的环境适应参数的匹配情况,对所述至少两种不同类型中的每种类型的传感器的可靠性进行评估,得到所述每种类型的传感器的环境适应性评分,包括:
14、若所述至少两种不同类型中的任意一种类型的传感器属于光照强度敏感类型且不属于温湿度敏感类型,在预设的第一映射关系中查找到与所述当前光照强度对应的所述任意一种类型的传感器的环境适应性评分;
15、其中,在所述第一映射关系中,当所述当前光照强度在预设的光照强度适应范围内时,所述任意一种类型的传感器的环境适应性评分为预设的第一分数阈值;当所述当前光照强度低于或高于所述光照强度适应范围时,所述任意一种类型的传感器的环境适应性评分与所述当前光照强度成线性正比或反比;
16、若所述至少两种不同类型中的任意一种类型的传感器不属于光照强度敏感类型和温湿度敏感类型,将预设的第二分数阈值作为所述任意一种类型的传感器的环境适应性评分;
17、若所述至少两种不同类型中的任意一种类型的传感器不属于光照强度敏感类型且属于温湿度敏感类型,在预设的第二映射关系中查找到与所述当前温度对应的所述任意一种类型的传感器的温度适应性评分,在预设的第三映射关系中查找到与所述当前湿度对应的所述任意一种类型的传感器的湿度适应性评分,对所述任意一种类型的传感器的温度适应性评分和湿度适应性评分进行加权求和计算,得到所述环境适应性评分;
18、其中,在所述第二映射关系中,当所述当前温度在预设的温度适应范围内时,所述任意一种类型的传感器的温度适应性评分为预设的第三分数阈值;当所述当前温度低于或高于所述温度适应范围时,所述任意一种类型的传感器的温度适应性评分与所述当前温度成线性正比或反比;
19、在所述第三映射关系中,当所述当前湿度在预设的湿度适应范围内时,所述任意一种类型的传感器的湿度适应性评分为预设的第四分数阈值;当所述当前湿度低于或高于所述湿度适应范围时,所述任意一种类型的传感器的湿度适应性评分与所述当前湿度成线性正比或反比。
20、结合第一方面的第一种可实施方式,在第一方面的第三种可实施方式中,根据所述每种类型的传感器的历史检测准确率对所述每种类型的传感器的可靠性进行评估,得到所述每种类型的传感器的历史性能评分,包括:
21、若所述至少两种不同类型中的任意一种类型的传感器不属于温湿度敏感类型,在预设的第四映射关系中查找到与所述任意一种类型的传感器的历史检测准确率对应的历史性能评分;
22、其中,在所述第四映射关系中,所述任意一种类型的传感器的历史性能评分与历史检测准确率成正比;
23、若所述至少两种不同类型中的任意一种类型的传感器属于温湿度敏感类型,获取在不同环境中的所述任意一种类型的传感器的历史检测准确率和检测频率,将所述任意一种类型的传感器在不同环境中的历史检测准确率和检测频率的乘积相加,得到所述任意一种类型的传感器的历史性能评分。
24、结合第一方面的第一种可实施方式,在第一方面的第四种可实施方式中,根据所述每种类型的传感器与所述其他类型的传感器的数据一致性和预设的数据阈值的匹配情况,对所述每种类型的传感器的可靠性进行评估,得到所述每种类型的传感器的数据一致性评分,包括:
25、所述至少两种不同类型中的每种类型的传感器与所述至少两种不同类型中的其他类型的传感器的数据一致性包括所述每种类型的传感器与所述其他种类的传感器检测到的实时间隔距离之间的欧式距离,所述数据阈值包括预设的距离阈值;
26、判断所述每种类型的传感器与所述其他类型的传感器检测到的实时间隔距离之间的欧式距离是否均小于或等于所述距离阈值;
27、若是,将预设的第五分数阈值作为所述每种类型的传感器的数据一致性评分;
28、若否,将所述距离阈值分别除以所述每种类型的传感器与所述其他类型的传感器检测到的实时间隔距离之间的欧式距离后相乘,得到所述每种类型的传感器的数据一致性评分。
29、结合第一方面的第一种可实施方式,在第一方面的第五种可实施方式中,按照所述每种类型的传感器的可靠性评分集,为所述每种类型的传感器检测到的实时间隔距离分配融合权重,所采用的数学表达包括:
30、
31、其中,i和j表示所述每种类型的传感器的索引,n表示所述传感器的类型总数,wi表示为第i种类型的传感器采集的实时间隔距离所分配的融合权重,ei、pi和ci分别表示第i种类型的传感器的环境适应性评分、历史性能评分和数据一致性评分,ej、pj和cj分别表示第j种类型的传感器的环境适应性评分、历史性能评分和数据一致性评分。
32、第二方面,提供了一种电动车门控制方法,所述方法包括:
33、在接收到开门指令时,根据第一方面或结合第一方面的第一种至第五种可实施方式中任一项所述的障碍物测距方法的步骤,获得目标障碍物与车身之间的最终间隔距离;
34、根据所述最终间隔距离和预设的电动车门长度,计算电动车门被开启后刚好与所述目标障碍物发生接触的最大开门角度;
35、将所述最大开门角度减去预设的预留角度,得到所述电动车门被开启后不与所述目标障碍物发生接触的最佳开门角度;
36、按照所述最佳开门角度控制所述电动车门开启。
37、结合第二方面,在第二方面的第一种可实施方式中,在按照所述最佳开门角度控制所述电动车门开启的步骤之前,所述方法还包括:
38、获取预设的最短开门距离,其中,所述最短开门距离为所述电动车门的活动端与车身之间的直线距离且支持普通身高和体重的成年人侧身下车;
39、根据所述最短开门距离和所述电动车门长度,计算最小开门角度;
40、判断所述最佳开门角度是否大于或等于所述最小门开角度;
41、若是,按照所述最佳开门角度控制所述电动车门开启;
42、若否,通过车内显示屏或语音,提醒车内乘员电动车门开启受限。
43、第三方面,提供了一种障碍物测距装置,所述装置包括:
44、传感器模块,包括至少两种不同类型的传感器,所述至少两种不同类型的传感器用于检测在车辆的预设范围内的目标障碍物与车身之间的距离,得到对应的至少两个实时间隔距离;
45、可靠性评估模块,用于分别基于当前环境参数、所述至少两种不同类型中的每种类型的传感器的历史性能以及所述每种类型的传感器与所述至少两种不同类型中的其他种类的传感器的数据一致性,对所述每种类型的传感器的可靠性进行评估,得到对应的可靠性评分集;
46、权重分配模块,用于按照所述每种类型的传感器的可靠性评分集,为所述每种类型的传感器检测到的实时间隔距离分配融合权重;
47、融合计算模块,用于基于所述至少两个实时间隔距离以及所述至少两个实时间隔距离所对应的融合权重进行融合计算,得到所述目标障碍物与车身之间的最终间隔距离。
48、第四方面,提供了一种电动车门控制系统,所述系统包括:
49、如第二方面或结合第二方面的第一种可实施方式所述的障碍物测距装置,用于在接收到开门指令时,获得目标障碍物与车身之间的最终间隔距离;
50、最大角度计算模块,用于根据所述最终间隔距离和预设的电动车门长度,计算电动车门被开启后刚好与所述目标障碍物发生接触的最大开门角度;
51、最佳角度计算模块,用于将所述最大开门角度减去预设的预留角度,得到所述电动车门被开启后不与所述目标障碍物发生接触的最佳开门角度;
52、电动车门控制模块,用于按照所述最佳开门角度控制所述电动车门开启。
53、上述障碍物测距方法、电动车门控制方法、装置和系统,通过至少两种不同类型的传感器,检测在车辆的预设范围内的目标障碍物与车身之间的距离,得到对应的至少两个实时间隔距离;分别基于当前环境参数、至少两种不同类型中的每种类型的传感器的历史性能以及每种类型的传感器与至少两种不同类型中的其他类型的传感器的数据一致性,对每种类型的传感器的可靠性进行评估,得到每种类型的传感器的可靠性评分集;按照每种类型的传感器的可靠性评分集,为每种类型的传感器检测到的实时间隔距离分配融合权重;基于至少两个实时间隔距离以及至少两个实时间隔距离所对应的融合权重进行融合计算,得到目标障碍物与车身之间的最终间隔距离。可见,一方面,本技术采用两种不同类型的传感器检测障碍物与车身之间的距离;另一方面,本技术从当前环境参数、每种类型的传感器的历史性能以及每种类型的传感器与其他种类的传感器的数据一致性等三个维度,评估每种传感器的可靠性,进而根据每种传感器的可靠性评估结果,适应性地给每个实时间隔距离分配融合权重。因此,与现有技术相比,本技术通过多传感器数据融合的方式改善了单一传感器检测范围有限的现象,并通过传感器评估结果自适应分配融合权重,提高了障碍物与车身之间的距离检测准确度。