一种用于检验食品可食用性的仿生吞咽一体化机器人及使用方法
本发明属于仿生机器人领域,涉及一种用于检验食品可食用性的仿生吞咽一体化机器人及使用方法。
背景技术:
1、食品特性检测规范要求测试设备不仅能够提供仿生度尽可能高的咀嚼轨迹、咬合力和口腔环境,还需要测试设备具有模拟咀嚼食物通过食道的功能。目前,市面上存在的咀嚼机器人其研究方向多为通过改变机械结构提高咀嚼的仿生度,如中国专利cn110849651b中公开了一种用于义齿性能测试的仿生咀嚼机器人,其咀嚼机构是采用点接触球副提供一种具备良好弹性性能的颞下颌关节结构,此类咀嚼机器人虽有良好的咀嚼效果,但是并不具备吞咽功能更无法检测食品通过食道的过程。
2、近年来,随着医工结合热度的提高,对于吞咽机器人的研究也越来越广泛,目前存在的吞咽机器人主要有两类,一类以气动或者液体驱动柔性材料变形实现吞咽动作,如气动控制硅胶软体表面收缩或扩张,或利用气动肌肉做端面驱动件或中间连接件带动机器人进行弯曲运动模仿舌头吞咽过程等。另一类则是以弹性材料作为端面结构通过添加连接结构使得相邻弹性端面可以联动,在端面机构和连接结构的配合下可以完成吞咽功能。如中国专利cn110495301a中公开了一种环抱吞咽式的脐橙采摘器,其吞咽机构是利用多个弹性环状绳作为端面结构,四条弹性绳子作为中间连接结构,塑料框作为底部收集装置,可实现对不同大小脐橙的收集。此两种吞咽机器人均不具备咀嚼功能,同时也不具备模拟食道功能,无法对食品进行一次性全方位可食用性检测。
3、舌头是人类正常生理活动中常用的器官,其在测试食品特性时主要功能包括:1)对食物进行搅拌,配合牙齿完成咀嚼;2)挤压调整已咀嚼好的食团,配合上颚完成吞咽。现有的仿生舌头主要有两类:一类为刚性仿生舌配合驱动器进行单自由度机械运动。另一类则是采用软体材质制备仿生舌,例如中国专利cn209377807u中公开了一种均由硅橡胶制成的舌头本体、多向驱动器和至少两个单向驱动器,利用硅橡胶材料特性,通过对驱动器通气使得舌头本体完成相应运动。此两种仿生舌虽能实现上述两项基本功能,但是并没有考虑到口腔和食道连接以及口腔內部的空间问题,因此并不适用于咀嚼吞咽一体化机器人。
4、因此,现有的咀嚼机器人在食物搅拌、辅助吞咽、食道检测等方面存在问题,缺乏针对性的设计,不能很好满足食物特性检测的需要。
技术实现思路
1、针对现有技术中存在的问题,本发提供一种集咀嚼、搅拌、吞咽、食道检测功能于一体的用于检验食品特性的仿生吞咽一体化机器人及使用方法。
2、为了达到上述目的,本发明采用的技术方案是:
3、一种用于检验食品特性的仿生吞咽一体化机器人,所述的仿生吞咽一体化机器人包括咀嚼机器人机械本体、辅助吞咽搅拌仿生舌、仿生检测食团运动装置三部分。
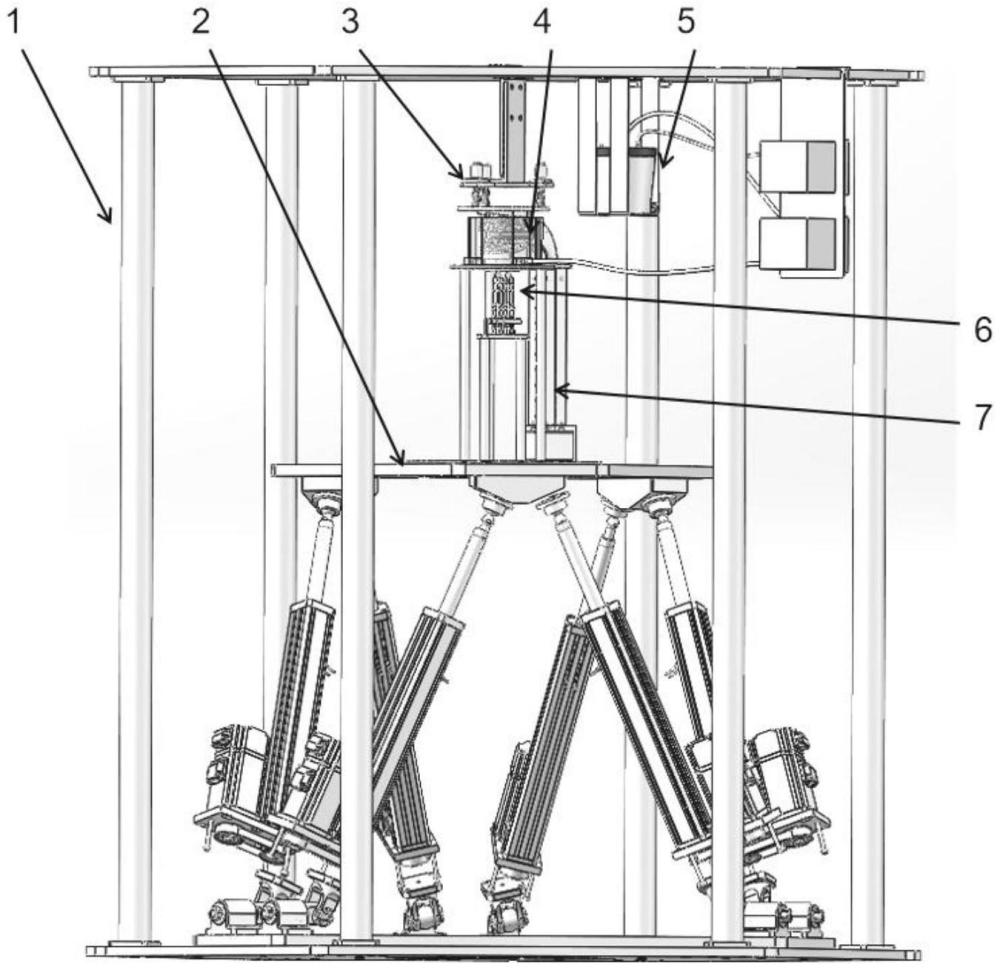
4、所述的咀嚼机器人机械本体包括主体支架1,支架下方的六自由度平台2,支架内部前上方的柔性上颌结构3,六自由度上平台2上方的下颌结构4,支架内部后上方的唾液滴注系统5,上下颌结构3、4之间的仿生舌系统6和位于下颌结构正后方的检测食团运动装置7以及装载windows系统的上位机。上颌结构3和唾液滴注系统5吊装在主体支架上方,通过六自由度平台2带动下颌结构4与柔性上颌结构3进行挤压,配合仿生舌系统6完成咀嚼运动。
5、所述的主体支架1包括水平底板101、侧面布置的6个支撑柱102和水平顶板103,其中,支撑柱102位于水平底板101、水平顶板103之间。所述底板101与六自由度平台底板201进行连接。所述顶板103从后至前,依次与蠕动泵吊装组件503、唾液瓶吊装组件506与柔性上颌结构主体吊装板301之间进行连接。
6、所述的六自由度运动平台2包括平台顶板201、顶板201下方布置的6个上铰安装座202、与上铰安装座202连接的6个推杆圆杆203、推杆圆杆203下方布置的6个缸筒204、推杆圆杆203旁布置的6个电机205、底部布置的6个卧式虎克铰206、平台底板207。
7、所述的柔性上颌结构3包括上夹具301、下夹具302、柔性上颌上板303、直线轴承304、弹簧305、导向柱306、柔性上颌下板307、上颌牙模组308。所述上夹具301吊装在顶板103正下方,所述下夹具302布置在上夹具301正后方使用螺栓紧固连接固定,所述柔性上颌上板303布置在下夹具302正下方使用螺栓紧固连接,所述直线轴承304布置在柔性上板303正上方使用螺栓紧固连接,所述弹簧305以及导向柱306布置在柔性上板303与柔性下板307之间,导向柱306使用螺栓紧固连接,所述上颌牙模组308通过使用电镜扫描人体口腔上颌结构,得到相应模型,进而通过3d打印技术进行制备,并通过螺栓紧固连接布置在柔性上颌上板307下方。
8、所述的下颌结构4包括仿生密闭口腔401、下颌牙模组件402、下牙过渡板403、下颌同轴板404、下颌支撑柱405、下颌底板406。仿生密闭口腔401布置在下颌同轴板404正上方使用螺栓紧固连接,下牙过渡板403布置在仿生密闭口腔401内,使用螺栓与下颌同轴板404紧固连接,所述下颌支撑柱405负责连接下颌同轴板404以及所述下颌底板406,所述下颌底板406固定平台顶板201上,使用螺栓紧固连接。所述下颌牙模组件402与上颌牙模组件305采用相同的制备工艺进行制造。所述仿生密闭口腔401其正后面的右上和左下角分别布置4mm圆孔用于安装进流软管506、回流软管507。整个下颌结构4布置在柔性上颌结构3正下方,通过与六自由度运动平台顶板201连接的下颌同轴板404带动整个下颌牙模组件305进行运动,配合固定的上颌牙模组件308完成模拟人类咀嚼运动。此外还可以通过调整上夹具301与下夹具302的上下距离从而调整上下颌牙模组件间距,满足不同工况下的咀嚼要求。
9、所述的唾液滴注系统5包括回流蠕动泵501、进流蠕动泵502、蠕动泵吊装组件503、唾液瓶吊装组件504、透明唾液瓶505、进流软管506、回流软管507。所述回流蠕动泵501、进流蠕动泵502安装在蠕动泵吊装组件503内,回流蠕动泵501通过进流软管506与透明唾液瓶505连通,进流蠕动泵502通过回流软管507与透明唾液瓶505连通;蠕动泵吊装组件503和唾液瓶吊装组件504安装在主体支架1上,透明唾液瓶505安装在唾液瓶吊装组件504上。所述进流软管506由透明唾液瓶505引出,经进流蠕动泵502指向仿生密闭口腔401的进流孔。所述回流软管507经仿生密闭口腔401回流孔引出,经回流蠕动泵501,重新流入透明唾液瓶505。两者构成完整的唾液回路。具体的:所述回流蠕动泵501、进流蠕动泵502通过泵头旋转不断挤压回流软管507、进流软管506内的人造唾液向泵头旋转方向输送。所述蠕动泵吊装组件503与水平顶板103固定连接,并沿着垂直方向根据蠕动泵尺寸开矩形孔,套住回流蠕动泵501、进流蠕动泵502的外周,配合蠕动泵自身携带的卡扣进行固定连接。所述唾液瓶吊装组件504由矩形托盘和四周的吊装板组成,吊装板与水平顶板103固定连接。所述的透明唾液瓶505布置在唾液瓶吊装组件504的矩形托盘中,其瓶盖上方布置由两个圆形孔,用于布置进流软管506和回流软管507。
10、所述的仿生舌系统6包括舌头组件支柱601、电缸夹持底座602、电缸夹持板603、电缸604、舌中铰链605、舌尖铰链606、软体仿生舌607。所述舌头组件支柱601固定在下颌底板406上方,使用螺栓紧固连接,所述电缸夹持底座602布置在舌头组件支柱601上方使用螺栓紧固连接,所述电缸夹持板603布置在电缸夹持底座603上方,使用螺栓紧固连接,所述电缸604布置在电缸夹持底座602以及电缸夹持板603中间,所述舌中铰链605、舌尖铰链606分别布置在两不同电缸的伸缩杆上方,所述软体仿生舌607布置在舌中铰链605、舌尖铰链606上方,通过两电缸同步、异步伸缩,使得软体仿生舌产生不同运动姿态从而完成搅拌及吞咽任务。
11、所述的检测食团运动装置7包括仿生喉咙701、仿生食道702、透明食道外壳703、食团收集装置外框704、食团收集盒705。所述的仿生喉咙701由3d打印制备而成,紧固在仿生密闭口腔401以及透明食道外壳703上,将仿生舌系统6输送的咀嚼食团传送至仿生食道702处;所述的仿生食道702为气动软体装置,布置在透明食道外壳703内部,由全透明硅胶制成,采用多环型密闭腔体结构,每部分腔体之间相互独立,通过控制气室的通断状况及频率则可生成波状蠕动运动运动,且可以满足多种不同的蠕动模式。所述的食团收集装置外框704、食团收集盒705由3d打印制备而成,布置在透明食道外壳703以及下颌同轴板404之间,使用螺栓进行紧固连接,便于收集咀嚼后的食团。
12、一种用于检验食品特性的仿生吞咽一体化机器人的使用方法,基于上述咀嚼吞咽一体化机器人进行食品可食用性能测试,包括以下步骤;
13、首先,对制造的特种食品进行特性评估,通过叉勺实验确定特种食品各项性能大致范围,完成测试前的准备工作。根据食品所需咬合力要求,将上、下颌牙模组件305、404装配至对应位置,使用紧定螺钉拧紧。
14、其次,在完成以上牙模组件305、404的装配工作后,进行唾液滴注系统5回路的连通,将仿生密闭口腔401内的唾液再回流蠕动泵501的输送下沿回流软管507回流至透明唾液瓶505中。唾液瓶505中的唾液在进流蠕动泵502的输送下沿进流软管506滴注至仿生密闭口腔401中,参与湿润食团。按顺序开启回流蠕动泵501与进流蠕动泵502,并将进流蠕动泵502转速设置低于回流蠕动泵501,保证密闭口腔401内唾液不溢出。
15、再次,面对不同特性食物,通过上位机对六自由度平台控制器设定上平台运动轨迹,从而带动下颌结构,间接控制下颌运动轨迹,启动咀嚼机器人的运动控制系统。六自由度平台运动控制器向六个处于位置控制模式电机驱动器发送位置信号,驱动器进一步驱动电机205,推动六个缸筒204带动平台顶板201进行运动,从而带动下颌结构4进行咀嚼轨迹运动,完成咀嚼食团功能。
16、而后,在特种食物开始咀嚼后,在上位机启动电缸控制系统使得对应的电缸进行同步、异步伸缩,从而完成软体仿生舌607的搅拌和辅助吞咽功能,在完成咀嚼后打开气泵控制系统使得仿生食道702对应的腔室进行充气/放气从而实现仿生食道702的波状蠕动功能。
17、最后,实验结束后,通过上位机首先结束六自由度平台2运动,而后对单片机和电缸下达结束指令并关闭气泵,然后依次自动关闭进流蠕动泵502,待仿生密闭口腔401中无肉眼可见残留唾液再关闭回流蠕动泵501。
18、本发明的效果和益处是:
19、1)本发明驱动装置采用成熟的六自由度平台,调试方便,可编辑多种运动轨迹,可适应不同种类特种食品的咀嚼要求,实现对多种产品特性的检测,并提供新的食品检测标准。
20、2)本发明采用全透明硅胶制成的多腔体仿生食道,可模拟人体食道波状蠕动机制,且为全透明,便于使用视觉相机对咀嚼后的食团进行观测,观测指标包括食团性状,以及食团通过仿生食道所需时间,此外还可通过改变上位机程序控制波状蠕动速度,从而实现不同的吞咽速率,保证了食团检测的高仿生性,且本发明提供的为咀嚼吞咽一体化机器人,可以同时进行咀嚼和吞咽两种不同的食品检测实验,功能更加宽泛。
21、3)本发明采用气动软体仿生舌辅助咀嚼和吞咽功能。在牙模组件中布置仿生舌,通过改变充气压强,使其能够进行辅助咀嚼和吞咽动作,避免口腔内残留过多食物残渣,此仿生舌上表面采用人体仿生舌面设计凹槽结构,可保证咀嚼食团能够存放在上舌面,使得咀嚼食团能够顺利进入仿生食道中,避免食团流至别处。
22、4)本发明驱动装置采用beckhoff系统进行控制,气动软体装置采用单片机控制电磁阀,单片机通过上位机使用arduino系统进行控制,电缸使用串口调试板进行控制此三种系统运行环境均为windows,便于使用一台上位机进行集成控制。一方面避免了切换系统降低复杂性,保证了操作简便,实验安全;另一方面,提高了测试流程的自动化程度。
- 还没有人留言评论。精彩留言会获得点赞!