一种可以两栖使用的无高压气源自动补充压力的气动仿章鱼柔性机械手及其工作方法
本发明涉及软体手,具体而言,尤其涉及一种可以两栖使用的无高压气源自动补充压力的气动仿章鱼柔性机械手及其工作方法。
背景技术:
1、面向21世纪多工况探索的需求,各种软体执行器技术逐渐发展。软体机械手是物体抓取中必不可少的重要装备,小型化、轻量化是其未来的发展趋势。目前的软体机械手驱动方式以气压驱动为主,但该驱动方式需要配备气泵,占用大量空间且在水下作业时因为受到水压影响难以正常工作。利用电机驱动也是目前软体机械手的一种驱动方式,但泄露无法完全消除使得电机存在失效风险。综上,目前软体机械手驱动方式存在体积、重量大,高压环境下工作稳定性低等问题。
2、公开号为cn117817697a的专利文件公布了一种位置和角度可变的三指气动软体仿生手,三个软体手指组件沿圆周方向均布设置,驱动模块驱动软体手指模型沿圆周方向移动和沿软体手指模型的轴线方向转动,但三指气动对抓取物体适用性不够广泛。
3、公开号为cn117464709a的专利文件公布了一种抓取力可调的软体手指、软体抓手及其制备方法,该发明可先弯曲软体手指进行预抓取,然后固定指尖位置后再调节抓取力,可适用于易碎物品的无损伤抓取,但是抓取稳定性和驱动方式单一。
技术实现思路
1、根据上述提出的技术问题,而提供一种可以两栖使用的无高压气源自动补充压力的气动仿章鱼柔性机械手及其工作方法。本发明自带压力源的软体手可以在大幅减少驱动源所占用体积的同时满足工作条件,而且可以通过气压或液压对软体手进行加压工作,满足陆上或水下不同工况的应用。通过压下注射器推杆对软体手施加压力使其在弯曲缠绕的同时抓取其中的物体。自带压力源的软体手与传统启动软体手相比具有体积紧凑、应用场景灵活等优势,更适合复杂场景下的应用。
2、本发明采用的技术手段如下:
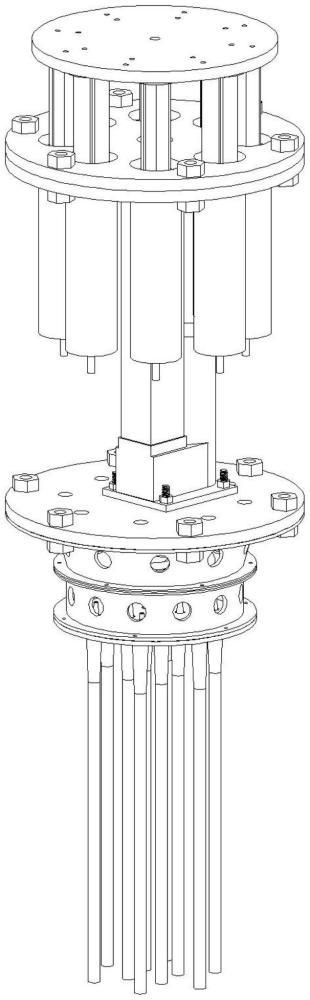
3、一种可以两栖使用的无高压气源自动补充压力的气动仿章鱼柔性机械手,包括:质心位于同一直线且自上至下依次布置的加压模块、气压源模块、壳体、压力介质管和多根软体手,所述加压模块的底部固定在壳体的顶部,所述气压源模块连接在加压模块的上方;
4、所述压力介质管置于壳体内部,所述压力介质管的内部充入有加压介质,所述压力介质管的上部通过多根第一软管与气压源模块连接,所述压力介质管的下部通过多根第二软管与多根软体手连接,所述多根软体手连接在壳体的底部,通过加压模块驱动气压源模块向软体手加压实现抓取功能。
5、进一步地,所述加压模块包括压板、推杆和推缸,所述气压源模块连接在压板上,所述推杆的顶部与压板固定连接,所述推杆的下部穿过气压源模块的中心滑动连接在推缸中,所述推缸固定在壳体的顶部。
6、进一步地,所述气压源模块包括多个注射器推杆、多个注射器壳、注射器上固定板以及位于注射器上固定板下方的注射器下固定板,所述注射器上固定板与注射器下固定板固定连接,所述注射器下固定板与加压模块的推缸相连;
7、所述多个注射器推杆呈圆周分布,所述多个注射器推杆的上端均与压板固定连接,且每个所述注射器推杆的下端均穿过注射器上固定板和注射器下固定板插入注射器壳中,所述注射器壳的顶部与注射器下固定板固定连接,所述注射器壳的尾部通过第一软管与压力介质管相连,所述注射器壳上还设有自动补充压力介质孔。
8、进一步地,所述注射器上固定板的圆周方向上开有多个第一通孔,所述注射器下固定板的圆周方向上开有多个第二通孔,所述多个第一通孔分别与多个第二通孔同轴设置,每组同轴的第一通孔和第二通孔构成安装孔,每个所述注射器推杆的下端穿过对应的安装孔插入注射器壳中;
9、所述注射器上固定板和注射器下固定板的中心开有连通的贯穿孔,加压模块的推杆穿过贯穿孔置于加压模块的推缸中,多个注射器壳围绕分布在推缸的外侧。
10、进一步地,所述壳体包括壳体上盖、上壳、下壳和壳体下盖,加压模块的推缸底部固定在壳体上盖上,所述上壳的上端与壳体上盖相连,所述上壳的下端与下壳的上端固定连接,所述下壳的下端与壳体下盖固定连接,所述壳体上盖、上壳、下壳和壳体下盖的内部构成容纳腔室,所述压力介质管置于该容纳腔室内。
11、进一步地,所述壳体上盖上设有多个第三通孔,所述多根第一软管分别穿过多个第三通孔;所述上壳的上端直径大于下端直径。
12、进一步地,所述压力介质管包括相连通的多个上端孔和多个下端孔,所述上端孔通过第一软管与气压源模块的注射器壳相连,所述下端孔通过第二软管与软体手相连。
13、进一步地,所述多根软体手呈圆周分布,包括直通和柔性手,所述直通连接在柔性手的顶部,所述柔性手的顶部固定在壳体的壳体下盖底部,所述壳体下盖上开有多个第四通孔,多个直通分别经多个第四通孔插入至壳体内,且所述直通通过第二软管与压力介质管连接。
14、进一步地,所述直通和柔性手偏心设置,所述柔性手的内部具有偏心孔,所述柔性手为下端封闭的硅胶柔性手,当压力介质进入加压时使柔性手卷曲缠绕以便抓取软体手中的物体。
15、本发明还提供了一种可以两栖使用的无高压气源自动补充压力的气动仿章鱼柔性机械手的工作方法,包括如下步骤:
16、s1、制备硅胶柔性手,使用模具使柔性手具有一定直径与一定偏心距的孔,且柔性手的下端在制作时保证密封;
17、s2、根据柔性机械手使用的环境,陆地或水下,来选择驱动柔性手的压力介质,在陆地使用时使用气体作为压力介质,在水下工作时选用液体作为压力介质,将压力介质加入压力介质管中;
18、s3、接通加压模块中推缸的电源,使推杆带动压板并且将注射器推杆提升至最高点,确保所有的注射器推杆随着压板一同提升,使注射器推杆的活塞位于注射器壳的自动补充压力介质孔上端补充压力介质;
19、s4、移动柔性机械手至待抓取的物体上方,将柔性机械手放下到最适合进行抓取工作的位置后,驱动推缸带动推杆使压板向下压注射器推杆,此时注射器推杆会推动注射器壳当中的压力介质,压力介质会通过软管流向软体手从而进一步推动对软体手施加压力,软体手受压时由于柔性手有偏心孔,受压后会在孔壁较薄处产生弯曲膨胀从而缠绕物体向上卷曲,多根软体手共同工作时会相互缠绕卷曲同时将物体抓取,完成抓取工作;
20、s5、抓取完物体后,将柔性机械手移动至规定位置,驱动推缸带动压板向上移动,同时带动注射器推杆向上移动进行释压从而放下物体;在抓取过程当中有一定量的压力介质泄漏产生内外压力差,从而导致下一次抓取工作无法顺利进行时,通过在每个注射器壳上设置的自动补充压力介质孔,当注射器推杆的活塞向上移动至注射器壳的自动补充压力介质孔后,压力介质自动补充消除内外压力差,使柔性机械手恢复至最初状态以便于进行下一次抓取。
21、较现有技术相比,本发明具有以下优点:
22、1、本发明采用了自带压力源的驱动方式,通过注射器向软体手加压实现抓取功能,软体手数量多且抓取稳定性好。
23、2、本发明结构紧凑且体积小,能够实现便捷快速驱动,有利于抓取软体机械的小型化、轻量化设计。
24、3、本发明可以根据具体工况使用不同压力介质进行灵活切换,可以适应陆上与水下环境。
25、基于上述理由本发明可在陆上与水下抓取等领域广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!