一种机器人抓取控制方法
【】本发明涉及一种机器人抓取控制方法,属于机器人抓取领域。
背景技术
0、
背景技术:
1、传统的机器人抓取方法往往依赖于预定义的抓取范式,无法根据目标属性进行自适应调整,难以实现精准灵活的抓取。部分方法通过将深度学习技术应用到机器人抓取中,旨在提高机器人在非结构化场景中的性能。然而,现有方法主要集中在基于机器人二指手的抓取方法,缺乏人手抓取的灵活性和多样性,无法进行精细的抓取。由于机器人多指灵巧手拥有更多的手指,通过控制和协调多个手指的动作,使得机器人能够执行更加复杂、精准、多样化的操作。
2、现有的机器人抓取控制方法主要通过视觉感知来检测目标的抓取点。然而,仅依赖抓取点来控制机器人多指灵巧手,缺乏对手指角度的精细控制,容易导致抓取过程中的稳定性和准确性不足。此外,这些方法无法利用抓取过程中的接触信息来判别当前的抓取状态并进行适时调整。而且,现有的方法通常只考虑单一的抓取模式,未能充分利用机器人多指灵巧手的多种抓取模式。因此,提出一种机器人抓取控制方法具有重要的研究意义。
技术实现思路
0、
技术实现要素:
1、有鉴于此,本发明面向机器人抓取操作,提出了一种机器人抓取控制方法。
2、本发明实例提供了一种机器人抓取控制方法,包括:
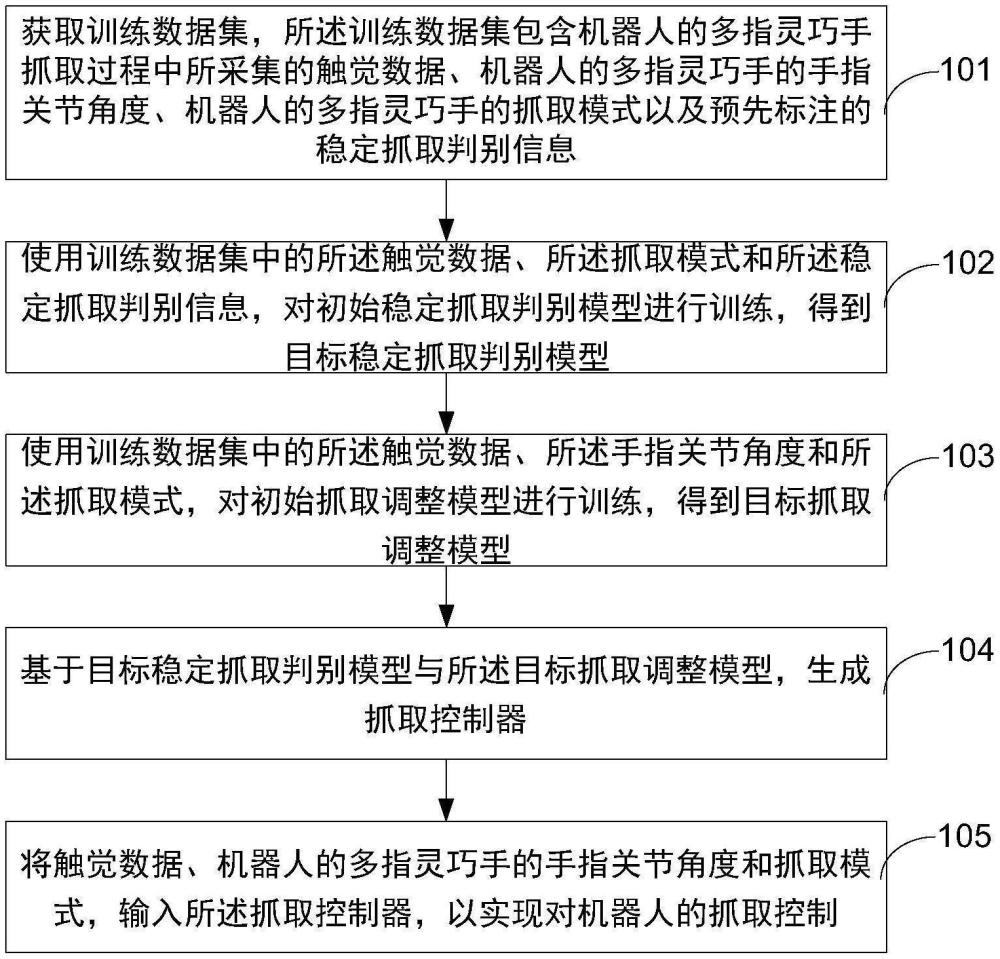
3、获取训练数据集,所述训练数据集包含机器人的多指灵巧手抓取过程中所采集的触觉数据、机器人的多指灵巧手的手指关节角度、机器人的多指灵巧手的抓取模式以及预先标注的稳定抓取判别信息;
4、使用训练数据集中的所述触觉数据、所述抓取模式和所述稳定抓取判别信息,对初始稳定抓取判别模型进行训练,得到目标稳定抓取判别模型;
5、使用训练数据集中的所述触觉数据、所述手指关节角度和所述抓取模式,对初始抓取调整模型进行训练,得到目标抓取调整模型;
6、基于目标稳定抓取判别模型与所述目标抓取调整模型,生成抓取控制器;
7、将触觉数据、机器人的多指灵巧手的手指关节角度和抓取模式,输入所述抓取控制器,以实现对机器人的抓取控制。
8、上述方法中,获取训练数据集,包括:
9、使用触觉传感器采集机器人的多指灵巧手抓取过程中的触觉数据;
10、使用机器人操作系统平台获取机器人的多指灵巧手抓取过程中的手指关节角度与抓取模式;所述抓取模式包括:基础抓取、宽指抓取以及并指抓取三种模式。
11、上述方法中,所述获取训练数据集,包括:
12、选择若干不同形状和硬度的物体,针对每个物体,在每个数据收集周期开始时,将该物体以不同方向放置在水平面的中心,并控制机器人执行下述操作:
13、物体放置在指定位置时,且机器人到达物体上方指定高度的位置时,机器人的多指灵巧手对该物体进行抓取操作;
14、机器人成功抓取物体后,垂直上升指定高度,在机器人启动提升过程中,使用触觉传感器采集触觉数据,使用机器人操作系统平台采集机器人的多指灵巧手的手指关节角度与抓取模式;
15、机器人到达指定姿势后,保持静止指定时长后,返回初始位置,机器人在初始位置释放物体。
16、上述方法中,所述使用训练数据集中的所述触觉数据、所述抓取模式和所述稳定抓取判别信息,对初始稳定抓取判别模型进行训练,得到目标稳定抓取判别模型,包括
17、将所述触觉数据输入初始稳定抓取判别模型的gcn特征提取子模型,得到触觉数据的图特征信息;
18、将所述机器人的多指灵巧手的抓取模式编码为one-hot向量信息;
19、将触觉数据的图特征信息与one-hot向量信息输入初始稳定抓取判别模型的特征融合单元,得到稳定抓取判别信息;
20、根据所述稳定抓取判别信息与预先标注的稳定抓取判别信息,判断所述初始稳定抓取判别模型是否达到预设的收敛条件,如果是,将当前初始稳定抓取判别模型作为目标稳定抓取判别模型;如果否,继续执行上述训练过程直至所述初始稳定抓取判别模型达到预设的收敛条件。
21、上述方法中,gcn特征提取子模型,包括:多个触觉阵列传感器;
22、其中,每个触觉阵列传感器由16个触感单元组成,每个触感单元由三维力向量组成,单个关节触觉传感单元的基本矩阵是构造一个边连接固定的静态触觉图g=(v,e),其中v表示触觉阵列传感器的各触感单元,e表示各触感单元之间的边连接,定义gcn特征提取子模型为f,抓取稳定性的稳定性分类表示为c∈(0,1),数值0和1分别表示稳定状态与滑动状态,为预测值,gcn特征提取子模通过静态触觉图g、基本矩阵f与稳定性分类,学习映射函数f,表示如下:
23、
24、采用多尺度卷积层提取特征信息,表示如下:
25、
26、其中,是第l+1层中触感单元v的特征向量,n(v)为触感单元v的相邻触感单元集合,w(l)为第l层的可学习权重矩阵,为第l层中触感单元u的特征向量,cvu为归一化常数,σ为relu激活函数,m表示第m个卷积层,n表示卷积层个数。
27、上述方法中,初始稳定抓取判别模型的特征融合单元包括:
28、将通过gcn特征提取子模型提取后的特征向量与one-hot向量信息进行拼接,将拼接结果输入全连接层中,表示如下:
29、
30、z=contact(o1,o2,,o3,m)
31、其中,h(l)表示第l层触感单元的触感单元特征矩阵,表示邻接矩阵a与单位矩阵i的和,表示的度矩阵,σ为relu激活函数,w(l)表示第l层触感单元的触感单元权重矩阵,oi表示单个关节的图特征信息,m表示抓取模式的one-hot向量信息,z表示拼接后得到的特征向量。
32、上述方法中,所述预先标注的稳定抓取判别信息包含所述触觉数据和机器人的多指灵巧手的抓取模式对应的机器人抓取状态,所述机器人抓取状态包括稳定状态和滑动状态。
33、上述方法中,所述使用训练数据集中的所述触觉数据、所述手指关节角度和所述抓取模式,对初始抓取调整模型进行训练,得到目标抓取调整模型,包括:
34、将触觉数据的图特征信息与机器人多指灵巧手的抓取模式输入基于mlp的初始抓取调整模型,得到预测的机器人的多指灵巧手的手指关节角度;
35、根据所述预测的机器人的多指灵巧手的手指关节角度与实际的机器人的多指灵巧手的手指关节角度的偏差值,判断所述初始抓取调整模型是否达到预设的收敛条件,如果是,将当前初始抓取调整模型作为目标抓取调整模型;如果否,继续执行上述训练过程直至所述初始稳抓取调整模型达到预设的收敛条件。
36、上述方法中,初始抓取调整模型,包括:
37、建立基于mlp的模型ks分别映射机器人的多指灵巧手的各关节的触觉数据的图特征信息g到机器人的多指灵巧手的各关节移动距离j:
38、j=ks(g,m;w,b)
39、其中,j=[θ1,θ2,θ3]t是关节角度向量,g=[g1,g2,g3]t为各手指的图特征信息,m为抓取模式,w和b分别表示模型的权重矩阵和偏置向量。
40、定义损失函数l来评估所述偏差值,表示如下:
41、
42、上述方法中,所述将触觉数据、机器人的多指灵巧手的手指关节角度和抓取模式,输入所述抓取控制器,以实现对机器人的抓取控制,包括
43、抓取控制器的抓取控制分为位置控制阶段与抓取调整阶段,并通过机器人的多指灵巧手的关节角度的向量范数的分段线性函数实现两阶段过渡,表示如下:
44、
45、其中,j表示多指手的当前手指角度,表示抓握参数内的手指角度,state表示目标稳定抓取判别模型的结果,0表示稳定状态,1表示滑动状态。
46、位置控制阶段:给定机器人预定义的目标多指灵巧手关节角度,机器人多指灵巧手逐渐合拢手指,合拢过程中,将触觉数据与机器人的多指灵巧手的抓取模式输入目标稳定抓取判别模型,得到稳定抓取判别信息,当到达预定义的多指灵巧手关节角度,并且目标稳定抓取判别模型的判别信息为稳定,机器人实现稳定抓取;目标稳定抓取判别模型的判别结果为滑动,则机器人停止位置控制阶段,进入抓取调整阶段;
47、抓取调整阶段:将当前触觉数据的图特征信息、预定义的触觉数据的图特征信息和抓取模式输入目标抓取调整模型,目标抓取调整模型得到多指灵巧手的手指关节所需的调整角度;将触觉数据和机器人的多指灵巧手抓取模式输入目标稳定抓取判别模型,目标稳定抓取判别模型得到当前抓取状态;机器人不断调整多指灵巧手的手指关节角度,直到目标稳定抓取判别模型的判别结果为稳定。
48、抓取控制器表示为:
49、
50、其中,kp为位置控制阶段的增益矩阵,j为当前多指灵巧手关节角度,为预定义多指灵巧手关节角度,ks为抓取调整模型,为预定义的触觉数据的图特征向量,g为实际的图特征向量。
51、由以上技术方案可以看出,本发明实施例具有以下有益效果:
52、本发明提出通过触觉数据与机器人多指灵巧手的抓取模式构建稳定抓取判别模型,通过触觉数据、机器人多指灵巧手的手指角度和抓取模式来构建抓取调整模型。通过结合稳定抓取判别模型与抓取调整模型,构建了机器人抓取控制器,实现机器人的稳定抓取控制。
- 还没有人留言评论。精彩留言会获得点赞!