一种新型九自由度运动冗余并联机构
本发明涉及机构学及机器人,具体涉及一种新型九自由度运动冗余并联机构。
背景技术:
1、与串联机构相比,并联机构具有更加紧凑的结构、更快的响应速度和更好的承载能力,因此在自动化生产和运动模拟器等领域中得到了广泛的应用。同时,并联机构的结构刚度和定位精度也有显著的提高,因而在精密仪器的制造装配领域中也具有重要的地位。
2、然而,受到奇异位形影响,目前大多并联机构工作空间均十分有限,尤以姿态空间为甚。这大幅限制了传统并联机构在制造装配领域中的应用范围,具体的,在不改变机构结构、尺寸和安装方式的条件下,大多传统并联机构都只适用于一种或几种特定的且形状结构较为简单的零件的制造装配,而不适用于结构形状复杂或者具有多个待加工表面的零件的制造装配,更无法自适应地被应用于多种零件的制造装配。
3、与传统并联机构相比,运动冗余并联机构的运动支链具有比末端动平台更多的自由度,可以在保证末端动平台的位置和姿态不变的情况下,改变运动支链和机构的位形。这使得运动冗余并联机构可以主动地对不理想的位形,包括奇异位形,进行规避,从而获得更灵活的运动以及更大的工作空间。
4、当前研究中,大多并联机构的运动支链均基于串联结构进行设计。然而,对于运动冗余并联机构的冗长的运动支链来说,这将大幅增加运动传递过程中的累积误差,从而导致末端动平台定位精度的降低。因此,运动冗余并联机构的运动支链基于混联结构设计,混联结构具有良好的综合性能,在保有串联结构的运动灵活性的同时,兼具了并联结构的结构紧凑和高精度等良好性能,可以降低累积误差对末端动平台的定位精度的影响。
技术实现思路
1、基于上述现有技术中存在的问题,本发明的目的是:提供一种新型九自由度运动冗余并联机构,其能够实现对不理想位形的主动规避,其具有较大的工作空间和极强的姿态调整能力,在制造装配领域中具有较强的自适应能力。
2、为了达到上述目的,本发明采用如下技术方案:
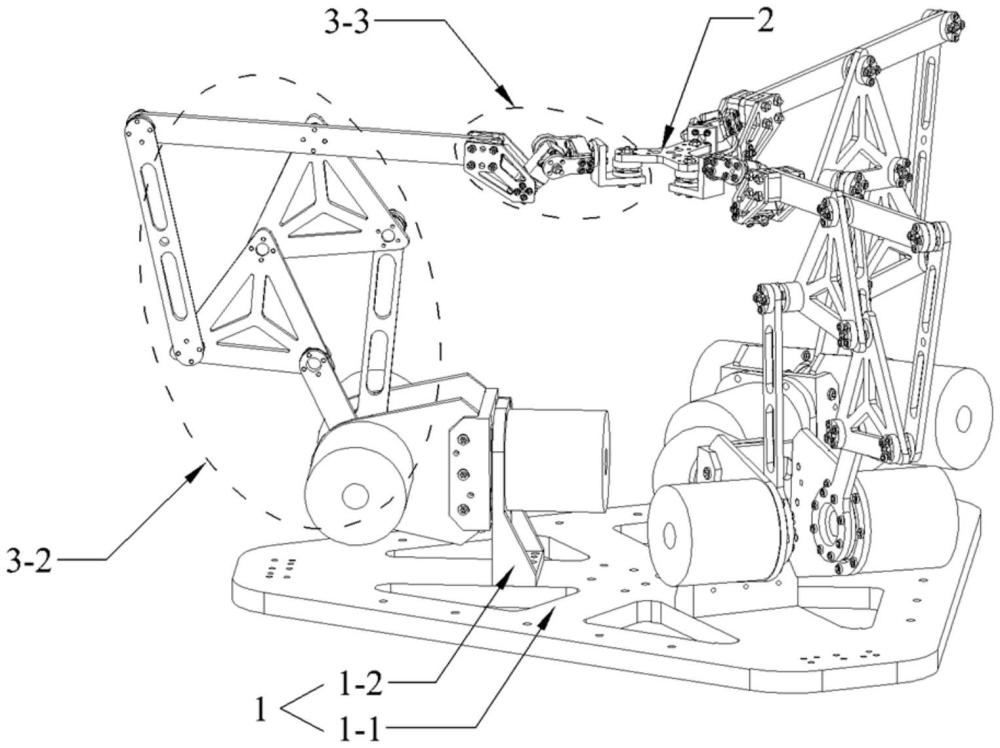
3、一种新型九自由度运动冗余并联机构,包括机架定平台、末端动平台和三个运动支链;
4、末端动平台与机架定平台相对设置,二者通过三个运动支链互相连接;
5、三个运动支链结构相同,均为混联结构,每一个运动支链均具有七个自由度,两端分别与机架定平台和末端动平台连接。
6、根据本发明一实施例,其中,机架定平台包括定平台主体和三个固定驱动器支架,固定驱动器支架沿定平台主体的周向分布并与之固连;
7、每一个运动支链均包括第一串联部分、并联部分和第二串联部分;
8、第一串联部分具有一个自由度,包括第一转动驱动器和支链驱动器支架;
9、第一转动驱动器设置于机架定平台的固定驱动器支架上,输出转轴与支链驱动器支架固连;
10、并联部分具有两个自由度,机架端设置于第一串联部分的支链驱动器支架上,输出端与第二串联部分连接;
11、第二串联部分具有四个自由度,为从动部分,包括三转动铰链和冗余连杆;三转动铰链提供三个转动自由度;冗余连杆的两端分别与三转动铰链和末端动平台连接,冗余连杆提供一个转动自由度,该转动自由度即为运动支链的冗余自由度。
12、根据本发明一实施例,其中,并联部分包括第二转动驱动器、第三转动驱动器、第一曲柄连杆、第二曲柄连杆、第一三角形连杆、第二三角形连杆、从动连杆、输出连杆、连杆转轴垫块和连杆转动连接组件;
13、第二转动驱动器和第三转动驱动器分别设置于第一串联部分的支链驱动器支架的两侧,第二转动驱动器和第三转动驱动器的输出转轴分别与第一曲柄连杆和第二曲柄连杆的曲柄端固连;
14、第一三角形连杆在三个顶点处分别与第二曲柄连杆的连杆端、第二三角形连杆的一个顶点和从动连杆的一端转动连接;
15、第二三角形连杆在不与第一三角形连杆连接的其他两个顶点处分别与第一曲柄连杆的连杆端和输出连杆的中部转动连接;
16、输出连杆的一端与从动连杆转动连接,另一端与第二串联部分固连;
17、连杆转动连接组件包括连杆转轴、连杆轴承和连杆轴承压板;第一曲柄连杆、第二曲柄连杆、第一三角形连杆、第二三角形连杆、从动连杆和输出连杆之间的转动连接均通过连杆转动连接组件实现;连杆转轴垫块用以补齐由连杆厚度所造成的高度差。
18、根据本发明一实施例,其中,第二串联部分的三转动铰链为球铰链,包括球头和球座;球头与冗余连杆固连,球座与并联部分的输出连杆固连。
19、根据本发明一实施例,其中,第二串联部分的三转动铰链为复合铰链,包括连杆基座,第一转动基座,第二转动基座和第三转动基座;
20、连杆基座,第一转动基座,第二转动基座和第三转动基座依次转动连接;
21、连杆基座与并联部分的输出连杆固连;
22、第三转动基座的法兰端与冗余连杆固连,连杆端与第二转动基座转动连接。
23、根据本发明一实施例,其中,连杆基座包括:两个完全相同的连杆基座侧板、两个完全相同的输出连杆垫块、铰链第一轴承、第一轴承基座和第一轴承端盖;
24、两个输出连杆垫块分别固连于并联部分的输出连杆两侧,外侧分别固连有一个连杆基座侧板;
25、第一轴承基座设置于连杆基座远离并联部分的输出连杆的一端,两侧分别与两个连杆基座侧板固连;第一轴承基座上设有用于安装铰链第一轴承的安装孔,铰链第一轴承通过其外圈在该安装孔处与第一轴承基座固连;所述第一轴承基座上固连有所述第一轴承端盖,二者夹紧固定所述铰链第一轴承的外圈的两侧;铰链第一轴承的内圈与第一转动基座固连。
26、根据本发明一实施例,其中,第一转动基座包括:铰链第一转轴、第二轴承基座、铰链第二轴承和第二轴承端盖;
27、铰链第一转轴的转轴端通过铰链第一轴承与连杆基座转动连接,法兰端与第二轴承基座固连;第二轴承基座上设有用于安装铰链第二轴承的安装孔,铰链第二轴承通过其外圈在该安装孔处与第二轴承基座固连;第二轴承基座上固连有第二轴承端盖,二者夹紧固定铰链第二轴承的外圈的两侧;铰链第二轴承的内圈与第二转动基座固连。
28、根据本发明一实施例,其中,第二转动基座包括两个完全相同的第二基座侧板、铰链第二转轴、铰链转轴垫圈、第三轴承基座、铰链第三轴承和第三轴承端盖;
29、铰链第二转轴的法兰端与一个第二基座侧板固连,转轴端通过铰链第二轴承与第一转动基座转动连接;铰链转轴垫圈设置于铰链第二转轴上,用以补齐铰链第二轴承与铰链第二转轴的转轴端一侧的第二基座侧板之间的高度差;第三轴承基座设置于第二转动基座远离第一转动基座的一端,两侧分别与两个第二基座侧板固连;第三轴承基座上设有用于安装铰链第三轴承的安装孔,铰链第三轴承通过其外圈在该安装孔处与第三轴承基座固连;第三轴承基座上固连有第三轴承端盖,二者夹紧固定铰链第三轴承的外圈的两侧;铰链第三轴承的内圈与第三转动基座的连杆端固连。
30、根据本发明一实施例,其中,冗余连杆包括冗余连杆转轴和冗余连杆主体;冗余连杆主体的两端分别与第二串联部分的三转动铰链和冗余连杆转轴的法兰端固连;冗余连杆转轴的转轴端与末端动平台转动连接。
31、根据本发明一实施例,其中,末端动平台包括动平台主体,三个完全相同的动平台轴承压板和三个完全相同的动平台轴承;
32、动平台轴承压板沿周向分布并固连于动平台主体上;
33、动平台主体上设有安装孔,其在对应安装孔处与动平台轴承的外圈固连,动平台主体和动平台轴承压板共同夹紧固定动平台轴承的外圈的两侧;
34、动平台轴承的内圈与冗余连杆转轴的转轴端固连。
35、总的说来,本发明具有如下优点:
36、1.本发明提供的一种新型九自由度运动冗余并联机构,其运动支链基于混联结构设计,结构紧凑且具有较高的结构刚度,可以降低运动传递的累计误差;同时,该混联运动支链可以使驱动器集中设置于机架定平台的一端,可以大幅降低运动支链在运动过程中的转动惯量,从而获得良好的动力学性能;
37、2.本发明提供的一种新型九自由度运动冗余并联机构,其运动支链的第二串联部分的冗余连杆可以提供一个冗余的转动自由度,可以实现:每一个运动支链都可以独立地变换自身的位形,而不对末端动平台的位置和姿态造成影响;这一特性使该新型九自由度运动冗余并联机构能够在运动过程中主动地规避奇异位形和其他的不理想位形,这可以令运动支链的运动更加灵活,因此,该新型九自由度运动冗余并联机构可以具有较大的工作空间和较强的姿态调整能力;
38、3.本发明提供的一种新型九自由度运动冗余并联机构,其通过运动支链的冗余自由度,还可以实现:运动支链的并联部分可以对第二转动驱动器和第三转动驱动器的输入角位移进行放大,能够进一步提高该新型九自由度运动冗余并联机构的响应速度;
39、4.本发明提供的一种新型九自由度运动冗余并联机构,其所包括的三转动铰链可以由球铰链模式转换为复合铰链的模式;采用复合铰链的模式可以大幅降低运动副行程限制对运动支链工作空间的影响,可以显著提高各运动支链的运动的灵活性,从而进一步提高该新型九自由度运动冗余并联机构末端动平台的姿态调整能力。
- 还没有人留言评论。精彩留言会获得点赞!