系统以及机器人的制作方法
本发明涉及系统以及机器人。
背景技术:
1、在专利文献1中记载有能够不增加成本地进行高效的搬运的搬运系统、机器人以及机器人的控制方法。
2、专利文献1:日本特许第6492271号公报
技术实现思路
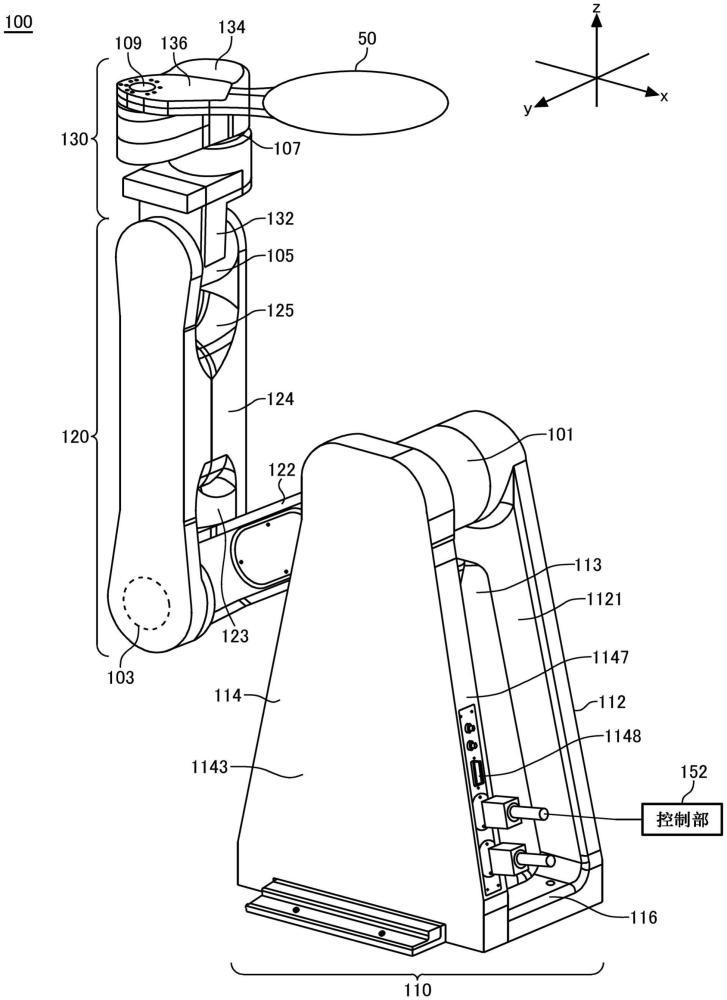
1、根据本发明的一个实施方式,提供一种系统。所述系统可以具备框体,该框体具有正面壁和与所述正面壁对置的背面壁,所述正面壁包括用于进入保存晶片的盒的多个开口部。所述系统可以具备配置于所述框体的机器人。所述机器人可以具有:第一基部;第一可动部,其具有第一臂和第二臂,所述第一臂的基端侧以如下方式连结于所述第一基部:使得所述第一臂能够以第一旋转轴为中心在垂直面内旋转,所述第二臂的基端侧以如下方式连结于所述第一臂的末端侧:使得所述第二臂能够以第二旋转轴为中心在垂直面内旋转;第二可动部,其具有第二基部、第三臂和手部,所述第二基部的基端侧以如下方式连结于所述第二臂的末端侧:使得所述第二基部能够以第三旋转轴为中心在垂直面内旋转,所述第三臂的基端侧以如下方式连结于所述第二基部的末端侧:使得所述第三臂能够以第四旋转轴为中心旋转,所述手部的基端侧以如下方式连结于所述第三臂的末端侧:使得所述手部能够以第五旋转轴为中心旋转,所述手部保持所述晶片;以及控制部,其以如下方式控制所述第一可动部和所述第二可动部:在所述手部与水平面平行的状态下使所述手部进入所述多个开口部中的各个开口部。所述多个开口部可以位于所述手部的最大可进入区域内,所述最大可进入区域基于所述机器人配置于所述框体的位置、使所述第一可动部最大地伸长的状态下的所述第一可动部的长度、以及使所述第二可动部最大地伸长的状态下的所述第二可动部的长度来确定。
2、在所述系统中,也可以是,使所述第二可动部最大地伸长的状态下的所述第二可动部的长度是在所述第三臂以及所述手部与水平面平行的状态下使所述第三臂以及所述手部最大地伸长时的从所述第四旋转轴到所述手部的末端的长度。
3、在所述任一系统中,也可以是,所述手部的所述最大可进入区域还基于使所述第一可动部最大地伸长的状态下的、使所述第三旋转轴旋转时的所述第二可动部的可动域来确定。
4、在所述任一系统中,也可以是,所述手部的所述最大可进入区域还基于使所述第一可动部最大地弯曲的状态下的、使所述第三旋转轴旋转时的所述第二可动部的可动域来确定。
5、在所述任一系统中,也可以是,所述手部的所述最大可进入区域还基于使所述第一可动部最大地伸长的状态下的、使所述第四旋转轴旋转时的所述第三臂和所述手部的可动域来确定。
6、在所述任一系统中,也可以是,所述手部的所述最大可进入区域还基于使所述第一可动部最大地弯曲的状态下的、使所述第四旋转轴旋转时的所述第三臂和所述手部的可动域来确定。
7、在所述任一系统中,也可以是,所述手部的所述最大可进入区域还基于使所述第一可动部最大地伸长的状态下的、使所述第五旋转轴旋转时的所述手部的可动域来确定。
8、在所述任一系统中,也可以是,所述手部的所述最大可进入区域还基于使所述第一可动部最大地弯曲的状态下的、使所述第五旋转轴旋转时的所述手部的可动域来确定。
9、在所述任一系统中,也可以是,所述手部的所述最大可进入区域还基于向量与所述第一基部的配置面垂直且与所述第四旋转轴平行的状态下的、从所述第三旋转轴到所述第二可动部的上端的长度来确定,所述向量与通过所述第二旋转轴及所述第三旋转轴且垂直于所述第二旋转轴及所述第三旋转轴的直线平行。
10、在所述任一系统中,也可以是,所述手部的所述最大可进入区域包括所述第三旋转轴的高度比所述第一旋转轴的高度高的状态下的所述手部的上方可进入区域、和所述第三旋转轴的高度比所述第一旋转轴的高度低的状态下的所述手部的下方可进入区域。
11、在所述任一系统中,所述背面壁可以包括位于所述手部的所述最大可进入区域内的开口部,所述控制部可以以如下方式控制所述第一可动部和所述第二可动部:在所述手部与水平面平行的状态下使所述手部进入所述背面壁的所述开口部。
12、在所述任一系统中,也可以是,所述控制部以如下方式控制所述第一可动部和所述第二可动部:一边维持第一角度满足预先确定的角度条件的状态,一边使所述手部进入位于所述手部的所述最大可进入区域内的进入对象,所述第一角度是与所述第一基部的配置面垂直的向上的向量和与通过所述第一旋转轴及所述第二旋转轴且垂直于所述第一旋转轴及所述第二旋转轴的直线平行的向量之间的角度。
13、在所述任一系统中,也可以是,所述机器人还具有:条件保存部,其保存包括第一候选条件和第二候选条件的所述角度条件,所述第一候选条件以所述第一角度包含于第一角度范围为条件,所述第二候选条件以所述第一角度包含于第二角度范围为条件;以及条件选择部,其基于所述进入对象的位置,从所述第一候选条件和所述第二候选条件中选择使所述手部进入所述进入对象的进入处理的所述角度条件,所述控制部以如下方式控制所述第一可动部和所述第二可动部:一边维持满足由所述条件选择部选择的所述角度条件的状态,一边使所述手部进入所述进入对象。
14、在所述任一系统中,也可以是,在所述进入对象位于所述框体的侧面壁侧、并且仅在所述第一角度包含于所述第一角度范围时所述手部能够进入的情况下,所述条件选择部选择所述第一候选条件作为所述进入处理的所述角度条件。
15、所述任一系统可以还具备pa(pre-aligner:预对准装置),所述pa位于所述框体的所述侧面壁侧,并且仅在所述第一角度包含于所述第一角度范围的情况下所述手部能够进入所述pa,所述条件选择部可以在所述进入对象为所述pa的情况下,选择所述第一候选条件作为所述进入处理的所述角度条件。
16、在所述任一系统中,也可以是,在选择了所述第一候选条件作为第一进入处理的所述角度条件时,在所述第一角度包含于所述第一角度范围的状态下所述手部能够进入所述第一进入处理的接下来的进入处理即第二进入处理的进入对象的情况下,所述条件选择部选择所述第一候选条件作为所述第二进入处理的所述角度条件,在所述第一角度包含于所述第一角度范围的状态下所述手部无法进入所述第二进入处理的所述进入对象的情况下,所述条件选择部选择所述第二候选条件作为所述第二进入处理的所述角度条件。
17、在所述任一系统中,也可以是,在所述条件选择部选择了所述第二候选条件作为所述第二进入处理的所述角度条件的情况下,所述控制部以将所述第一角度从所述第一角度范围变更为所述第二角度范围的方式控制所述第一可动部和所述第二可动部。
18、在所述任一系统中,也可以是,在所述第一角度包含于所述第一角度范围的状态下所述手部能够进入所述第二进入处理的接下来的进入处理即第三进入处理的进入对象的情况下,所述条件选择部选择所述第一候选条件作为所述第三进入处理的所述角度条件。
19、在所述任一系统中,也可以是,在所述第一角度包含于所述第二角度范围的状态下所述手部能够进入所述第二进入处理的接下来的进入处理即第三进入处理的进入对象的情况下,所述条件选择部选择所述第二候选条件作为所述第三进入处理的所述角度条件。
20、在所述任一系统中,也可以是,所述手部的所述最大可进入区域包括所述第一角度包含于所述第一角度范围的情况下的所述手部的第一可进入区域和所述第一角度包含于所述第二角度范围的情况下的所述手部的第二可进入区域,所述多个开口部中的至少一个开口部位于所述手部的所述第一可进入区域内且位于所述手部的所述第二可进入区域内。
21、在所述任一系统中,也可以是,在所述第二旋转轴的高度比所述第一旋转轴的高度低的状态下,所述控制部以如下方式控制所述第一可动部和所述第二可动部:使所述第三旋转轴和所述第二可动部不通过与所述第一基部的配置面垂直且包含所述第一旋转轴的平面而使所述第二旋转轴通过所述平面。
22、在所述任一系统中,也可以是,所述第一角度范围为从0°到220°的角度,所述第二角度范围为从-220°到0°的角度。
23、在所述任一系统中,也可以是,所述多个开口部位于如下这样的位置:所述手部能够以所述第一可动部与所述第三臂不发生干涉的方式进入。
24、在所述任一系统中,也可以是,所述手部的所述最大可进入区域包括所述第三旋转轴的最大动作范围的范围内的区域和所述第三旋转轴的所述最大动作范围的范围外的区域,所述多个开口部中的至少一个开口部位于所述第三旋转轴的所述最大动作范围的范围外的所述区域内。
25、在所述任一系统中,也可以是,所述至少一个开口部位于在使所述第一可动部最大地伸长且所述第三臂和所述手部与水平面平行的状态下使所述第一旋转轴旋转时的所述第三臂和所述手部的轨迹内。
26、在所述任一系统中,也可以是,所述多个开口部中的一个开口部位于如下这样的位置:在使所述第一可动部最大地弯曲的状态下,所述手部能够进入配置于与所述一个开口部对应的位置的盒的最下段的晶片保存部。
27、在所述述任一系统中,所述多个开口部可以位于比所述第一旋转轴高的位置,所述框体可以在所述手部的所述最大可进入区域内且比所述第一旋转轴低的位置具有开口部。
28、在所述任一系统中,也可以是,位于比所述第一旋转轴低的位置的所述开口部位于如下这样的位置:所述手部能够以所述第三臂与所述第一基部不发生干涉的方式进入。
29、所述任一系统可以还具备位于所述框体的侧面壁侧且位于所述手部的所述最大可进入区域内的pa,所述控制部可以以如下方式控制所述第一可动部和所述第二可动部:在所述手部与水平面平行的状态下使所述手部进入所述pa。
30、在所述任一系统中,也可以是,所述多个开口部中的由所述手部进入的频率最高的最频开口部位于如下这样的位置:第一角度满足在使所述手部进入所述pa时所述第一角度必须满足的第一pa进入条件,所述第一角度是使所述手部进入所述最频开口部时的、与所述第一基部的配置面垂直的向上的向量和与通过所述第一旋转轴及所述第二旋转轴且垂直于所述第一旋转轴及所述第二旋转轴的直线平行的向量之间的角度。
31、在所述任一系统中,也可以是,所述多个开口部中的由所述手部进入的频率最高的最频开口部位于如下这样的位置:第二角度满足在使所述手部进入所述pa时所述第二角度必须满足的第二pa进入条件,所述第二角度是使所述手部进入所述最频开口部时的、与通过所述第四旋转轴及所述第五旋转轴且垂直于所述第四旋转轴及所述第五旋转轴的直线平行的向量和与垂直于所述第五旋转轴且通过所述第五旋转轴的所述手部的中心线平行的向量之间的角度。
32、在所述任一系统中,也可以是,所述多个开口部中的由所述手部进入的频率最高的最频开口部位于如下这样的位置:第三角度满足在使所述手部进入所述pa时所述第三角度必须满足的第三pa进入条件,所述第三角度是与在动作区域内搬运所述晶片的方向平行的向量和与垂直于所述第五旋转轴且通过所述第五旋转轴的所述手部的中心线平行的向量之间的角度,所述动作区域以不与开闭区域重叠的方式定义于所述正面壁与所述背面壁之间的空间,所述开闭区域是供使所述手部进入最频开口部时的、设置于与所述多个开口部中的各个开口部对应的位置的盒开启器对所述盒进行开闭的区域。
33、根据本发明的一个实施方式,提供一种机器人,其配置于框体,该框体具有:正面壁,其具有用于进入保存晶片的盒的多个开口部;以及背面壁,其与所述正面壁对置。所述机器人可以具备第一基部。所述机器人可以具备第一可动部,所述第一可动部具有第一臂和第二臂,所述第一臂的基端侧以如下方式连结于所述第一基部:使得所述第一臂能够以第一旋转轴为中心在垂直面内旋转,所述第二臂的基端侧以如下方式连结于所述第一臂的末端侧:使得所述第二臂能够以第二旋转轴为中心在垂直面内旋转。所述机器人可以具备第二可动部,所述第二可动部具有具有第二基部、第三臂和手部,所述第二基部的基端侧以如下方式连结于所述第二臂的末端侧:使得所述第二基部能够以第三旋转轴为中心在垂直面内旋转,所述第三臂的基端侧以如下方式连结于所述第二基部的末端侧:使得所述第三臂能够以第四旋转轴为中心旋转,所述手部的基端侧以如下方式连结于所述第三臂的末端侧:使得所述手部能够以第五旋转轴为中心旋转,所述手部保持所述晶片。所述机器人可以具备控制部,所述控制部以如下方式控制所述第一可动部和所述第二可动部:在所述手部与水平面平行的状态下使所述手部进入所述多个开口部中的各个开口部,所述多个开口部包含于所述手部的最大可进入区域内,所述最大可进入区域基于所述机器人配置于所述框体的位置、使所述第一可动部最大地伸长的状态下的所述第一可动部的长度、以及使所述第二可动部最大地伸长的状态下的所述第二可动部的长度来确定。
34、另外,上述发明的概要并非列举了本发明的所有必要特征。另外,这些特征群的子组合也可成为发明。
- 还没有人留言评论。精彩留言会获得点赞!