工业机器人协同控制方法、系统、设备及存储介质与流程
本发明涉及工业机器人的,特别涉及一种工业机器人协同控制方法、系统、设备及存储介质。
背景技术:
1、工业机器人作为现代制造业中不可或缺的自动化设备,在提高生产效率、降低生产成本和保证产品质量方面发挥着重要作用。但现有的工业机器人协同控制方法往往只关注单一方面,如机器人本身的性能参数或简单的任务分配,而忽视了工作环境、任务需求和协作模式等多方面因素的综合考虑。这种简化的方法难以充分发挥多机器人系统的整体优势,可能导致资源分配不合理、协同效率低下等问题。同时,由于缺乏对任务和环境的全面分析,也难以针对复杂多变的实际生产场景做出灵活适应。
技术实现思路
1、本发明的主要目的为提供一种工业机器人协同控制方法、系统、设备及存储介质,能够使整个工业机器人系统更加适应复杂多变的实际生产场景,提高了多机器人系统的应灵活性和适应性。
2、为实现上述目的,本发明提供一种工业机器人协同控制方法,包括:
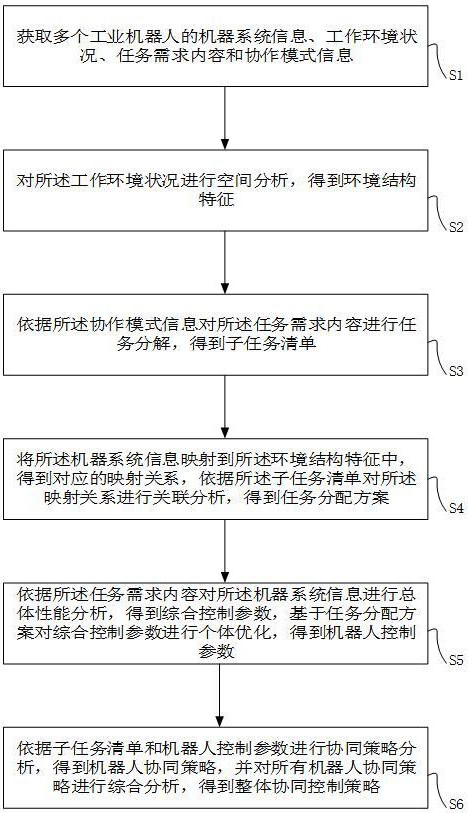
3、获取多个工业机器人的机器系统信息、工作环境状况、任务需求内容和协作模式信息;
4、对所述工作环境状况进行空间分析,得到环境结构特征;
5、依据所述协作模式信息对所述任务需求内容进行任务分解,得到子任务清单;
6、将所述机器系统信息映射到所述环境结构特征中,得到对应的映射关系,依据所述子任务清单对所述映射关系进行关联分析,得到任务分配方案;
7、依据所述任务需求内容对所述机器系统信息进行总体性能分析,得到综合控制参数,基于任务分配方案对综合控制参数进行个体优化,得到机器人控制参数;
8、依据子任务清单和机器人控制参数进行协同策略分析,得到机器人协同策略,并对所有机器人协同策略进行综合分析,得到整体协同控制策略。
9、进一步地,所述获取多个工业机器人的机器系统信息、工作环境状况、任务需求内容和协作模式信息,包括:
10、获取所有所述工业机器人的环境传感数据,对传感实时数据进行滤波处理,得到初步环境状况信息;
11、对所述初步环境状况信息进行特征提取,得到环境特征向量,依据预设的环境数据库对所述环境特征向量进行匹配分析,得到所述工作环境状况;
12、获取机器人参数信息,对机器人参数信息进行聚类,得到机器人类型信息,将所述机器人类型信息与预设的机器人能力数据库进行匹配,得到所述机器系统信息;
13、对接收到的任务指令进行语义分析并提取关键词,得到任务特征,将所述任务特征与预定义的任务模板库进行匹配,得到所述任务需求内容;
14、依据所述机器系统信息和所述任务需求内容,对所述工业机器人的空间位置关系进行分析,得到初步协作关系;
15、对所述初步协作关系进行优化计算并结合所述工作环境状况,得到所述协作模式信息。
16、进一步地,,所述对所述工作环境状况进行空间分析,得到环境结构特征,包括:
17、对所述工作环境状况数据进行三维点云重建,得到环境的三维点云表示,对所述三维点云表示进行优化处理,得到优化后的点云数据;
18、对所述点云数据进行平面分割和轮廓提取,得到环境中的轮廓平面和轮廓信息;
19、基于所述轮廓平面和所述轮廓信息进行特征匹配,识别环境中的结构元素,得到初步结构特征;
20、对所述初步结构特征的各结构元素之间的相对位置和方向进行空间关系分析,得到空间拓扑关系;
21、依据所述空间拓扑关系构建环境的层次化结构框架,得到环境的层次结构表示;
22、对所述层次结构表示中的各结构元素标注上所述工业机器人操作相关的功能属性,得到语义化的环境结构描述;
23、基于所述环境结构描述对环境中各区域进行可达性分析,得到可达性地图;
24、对所述可达性地图进行所述工业机器人的工作区域和障碍区域的划分处理,得到区域分类结果;
25、根据所述区域分类结果和所述环境结构描述,生成所述环境结构特征。
26、进一步地,所述依据所述协作模式信息对所述任务需求内容进行任务分解,得到子任务清单,包括:
27、从所述任务需求内容中提取关键词和任务目标,得到任务语义特征;
28、根据所述任务语义特征对预设任务模板库进行匹配,得到初步任务结构,对所述初步任务结构进行层次分解并构建任务层次树,得到多层级任务结构;
29、根据所述协作模式信息对所述多层级任务结构进行并行性分析,得到任务并行度序列矩阵,依据预设的资源计算规则对所述任务并行度序列矩阵进行资源需求计算,得到子任务资源需求表;
30、依据所述子任务资源需求表对子任务进行优先级排序,得到子任务优先级列表;
31、对所述子任务优先级列表进行时间依赖性分析,得到子任务时序关系;
32、根据所述子任务时序关系计算每个所述子任务的最早开始时间和最晚结束时间,得到子任务时间窗口;
33、将所述子任务优先级列表、所述子任务资源需求表和所述子任务时间窗口整合,生成所述子任务清单。
34、进一步地,所述将所述机器系统信息映射到所述环境结构特征中,得到对应的映射关系,依据所述子任务清单对所述映射关系进行关联分析,得到任务分配方案,包括:
35、对所述机器系统信息进行多维度特征提取,得到机器人能力特征张量;
36、对所述环境结构特征进行自适应八叉树空间划分,得到多分辨率环境网格表征;
37、依据所述机器人能力特征张量对所述多分辨率环境网格表征进行张量卷积运算,得到机器人适应性四维张量;
38、对所述子任务清单进行多层次分析,得到多层次任务需求矩阵;
39、基于所述机器人适应性四维张量和所述多层次任务需求矩阵进行框架构建,得到多约束条件下的混合规划框架,依据预设的遗传算法对所述混合规划框架进行方案分析,得到初步分配方案;
40、对所述初步任务分配方案进行冲突权重分析,得到带权重的冲突任务图;
41、依据所述冲突任务图对所述初步分配方案进行冲突消解,得到优化分配方案;
42、对所述优化任务分配方案进行多目标资源平衡分析,得到资源分配张量;
43、依据所述资源分配张量对优化分配方案进行动态微调,得到具适应能力的所述任务分配方案。
44、进一步地,所述依据所述任务需求内容对所述机器系统信息进行总体性能分析,得到综合控制参数,基于任务分配方案对综合控制参数进行个体优化,得到机器人控制参数,包括:
45、对所述任务需求内容进行任务特征提取,得到任务特征集合;
46、对所述机器系统信息进行多维度特征分析,得到机器系统特征集合;
47、将所述任务特征集合与所述机器系统特征集合进行匹配分析,得到任务与机器的性能匹配度;
48、依据所述性能匹配度结合所述任务需求内容对所述机器系统信息进行多目标参数优化分析,得到初始控制参数;
49、依据预设的敏感度规则对所述初始控制参数进行敏感性分析,得到参数敏感度;
50、根据所述参数敏感度对初始控制参数进行优化调整,得到所述综合控制参数;
51、对所述任务分配方案进行任务特性分析,得到任务特性指标;
52、根据所述任务特性指标对所述综合控制参数进行参数映射,得到初始个体控制参数;
53、对所述初始个体控制参数进行约束条件分析,得到参数约束集合,依据所述参数约束集合对所述初始个体控制参数进行可行性评估,得到可行参数集;
54、依据所述可行参数集结合所述机器系统特征集合进行个体性能评估,得到个体性能指标;
55、依据预设的稳定性评估规则对所述个体性能指标进行稳定性评估,得到稳定性评分;
56、根据所述稳定性评分从所有的所述初始个体控制参数中提取对应的参数
57、选择最优参数组合,得到所述机器人控制参数。
58、进一步地,所述依据子任务清单和机器人控制参数进行协同策略分析,得到机器人协同策略,并对所有机器人协同策略进行综合分析,得到整体协同控制策略,包括:
59、对所述子任务清单进行任务需求分析,得到每个所述子任务的具体任务需求参数,对所述具体任务需求参数进行优先级排序,得到子任务优先级列表;
60、将所述机器人控制参数与子任务优先级列表进行参数任务匹配,得到子任务匹配关系;
61、对所述子任务匹配关系进行工作负载均衡分析,得到负载均衡方案;
62、将所述负载均衡方案模拟映射到各个所述工业机器人中,得到各个所述工业机器人的负载分配;
63、根据所述负载分配对各个所述工业机器人的工作路径进行路径规划,得到初步规划方案;
64、对所述初步规划方案进行路径优化处理,得到优化路径方案;
65、根据所述优化路径方案对各个所述工业机器人的执行顺序进行调度分析,得到执行顺序安排;
66、根据所述优化路径方案对各个所述工业机器人的协同动作进行动作协调分析,得到动作协调方案;
67、对所述执行顺序安排和所述动作协调方案进行时间同步分析,得到时间同步策略;
68、将所述执行顺序安排、所述动作协调方案和所述时间同步策略进行整合处理,得到综合同步策略;
69、依据所述综合同步策略对所有的所述工业机器人进行综合整体协调,得到所述整体协同控制策略。
70、本发明还提供一种工业机器人协同控制系统,应用于上述任意一项的工业机器人协同控制方法,包括:
71、采集模块,所述采集模块用于获取多个工业机器人的机器系统信息、工作环境状况、任务需求内容和协作模式信息;
72、分析模块,所述分析模块用于对所述工作环境状况进行空间分析,得到环境结构特征;
73、关联模块,所述关联模块用于依据所述协作模式信息对所述任务需求内容进行任务分解,得到子任务清单;
74、处理模块,所述处理模块用于将所述机器系统信息映射到所述环境结构特征中,得到对应的映射关系,依据所述子任务清单对所述映射关系进行关联分析,得到任务分配方案;
75、控制模块,所述控制模块用于依据所述任务需求内容对所述机器系统信息进行总体性能分析,得到综合控制参数,基于任务分配方案对综合控制参数进行个体优化,得到机器人控制参数。
76、执行模块,所述执行模块用于依据子任务清单和机器人控制参数进行协同策略分析,得到机器人协同策略,并对所有机器人协同策略进行综合分析,得到整体协同控制策略。
77、本发明还提供一种工业机器人协同控制设备,包括:
78、存储器,用于存储程序;
79、处理器,用于执行所述程序,实现上述任意一项所述的一种空气源热泵系统热负荷量化方法的各个步骤。
80、本发明还提供一种存储介质,存储有计算机指令,所述计算机指令用于使计算机执行上述任一项所述的方法。
81、本发明提供的一种工业机器人协同控制方法、系统、设备及存储介质,具有以下有益效果:
82、通过对工作环境状况进行空间分析,结合协作模式信息对任务需求进行分解,能够更准确地评估不同子任务的特征和需求,从而提高了任务分配的合理性,为多机器人系统的协同作业提供了更为可靠的基础。将机器系统信息映射到环境结构特征中,并依据子任务清单进行关联分析,实现了对不同机器人能力和任务需求的精细化匹配,有助于充分发挥每个机器人的优势,避免资源浪费。基于任务需求内容对机器系统信息进行总体性能分析,能够确保系统在不同任务场景下均能高效运行,减少了不必要的性能损耗,提高了系统的整体运行效率。通过对所有机器人协同策略进行综合分析,制定出更为合理的整体协同控制策略,从而有效提升了多机器人系统的协作效率,减少了生产时间和成本。同时,通过考虑协作模式信息,能够根据不同类型的协作需求灵活调整控制策略,使得系统更加适应复杂多变的实际生产场景,提高了多机器人系统的应灵活性和适应性。
- 还没有人留言评论。精彩留言会获得点赞!