驱动装置、驱控方法以及机器人与流程
本技术涉及驱动,具体而言,涉及一种驱动装置、驱控方法以及机器人。
背景技术:
1、为了让机器人(足式机器狗、人形机器人、多旋翼无人机等)更灵活且具有更强的负载作业能力,机器人的驱动装置需要具有较高的扭矩、推力密度、高动态响应以及高爆发力等。其中,驱动装置是机器人能够完成高爆发工况的关键部件,驱动装置需要具备较大的扭矩和电流过载倍数来完成机器人的高爆发工况。在实际的使用过程中,机器人的高爆发运行必然导致巨大电能转换为热能,驱动装置内的功率板的瞬时发热严重。但是,驱动装置的安装空间受到较大的空间限制,这会限制热量散失不充分,易导致功率板的温升过高,机器人存在被烧毁的风险。
技术实现思路
1、本技术的主要目的在于提供一种驱动装置、驱控方法以及机器人,以解决背景技术提到的机器人完成高爆发工况时,驱动装置内功率板的散热效果较差、功率板温升过高的问题。
2、根据本技术的一个方面,提供了一种驱动装置。该驱动装置包括:
3、安装壳;
4、电机,所述电机安装于所述安装壳内;
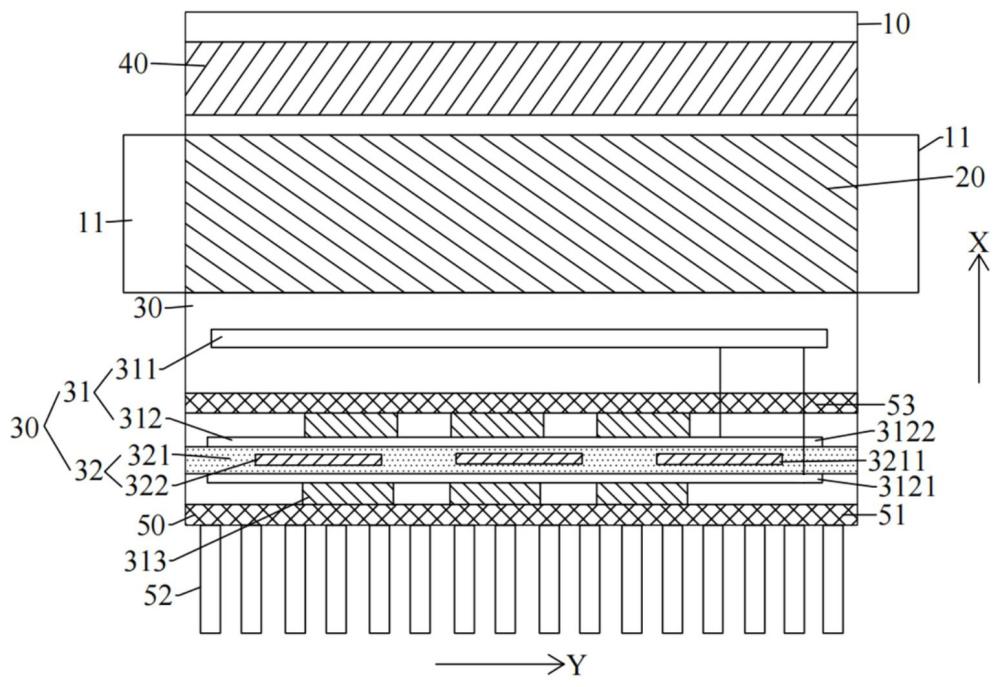
5、驱动器,所述驱动器包括控制组件以及吸热组件,所述控制组件包括控制板和功率板,所述控制板安装于所述安装壳内,所述功率板电连接于所述电机与所述控制板之间,所述控制板用于控制所述功率板驱动所述电机;
6、其中,所述功率板包括至少两块,至少两块所述功率板安装于所述控制板沿第一方向的一侧,且所述吸热组件贴靠于相邻两块所述功率板之间。
7、进一步地,所述吸热组件包括:
8、安装主体,所述安装主体内设置有空腔;
9、相变吸热体,所述相变吸热体嵌设于所述空腔内,所述相变吸热体用于通过物理状态的变化吸收热量。
10、进一步地,所述安装主体为板状结构,相邻两块所述功率板贴靠于所述安装主体沿第一方向的相对两侧。
11、进一步地,沿第一方向,所述功率板的投影外轮廓位于所述安装主体的投影外轮廓内。
12、进一步地,所述空腔包括多个,多个所述空腔沿第二方向间隔设置于所述安装主体内,且多个所述空腔内均嵌设有所述相变吸热体。
13、进一步地,所述驱动器还包括导通开关,所述导通开关凸设于所述功率板沿自身厚度方向的一侧,所述吸热组件贴靠于相邻两块所述功率板背离所述导通开关的一侧,所述导通开关电连接于所述功率板和所述电机之间并与所述控制板电连接,所述控制板控制所述导通开关导通或断开所述功率板和所述电机之间的连接通路;和/或,
14、所述吸热组件的轮廓外边缘与所述安装壳的内侧壁贴紧连接。
15、进一步地,所述驱动装置还包括:
16、散热组件,所述散热组件安装于靠近所述安装壳内侧壁的所述功率板和所述安装壳之间,和/或,所述散热组件安装于靠近所述控制板的所述功率板和所述控制板之间。
17、进一步地,所述功率板包括第一功率板和第二功率板,沿第一方向,所述第一功率板位于所述吸热组件靠近所述安装壳内侧壁的一侧,所述第二功率板位于所述吸热组件靠近所述控制板的一侧;所述散热组件包括:
18、第一导热硅脂层,所述第一导热硅脂层贴靠于所述第一功率板和所述安装壳的内侧壁之间;
19、第一散热翅片,所述第一散热翅片包括多块,多块所述第一散热翅片沿第二方向依次排布于所述安装壳外侧并与所述第一导热硅脂层对应设置。
20、进一步地,所述散热组件还包括:
21、第二导热硅脂层,所述第二导热硅脂层贴靠于所述第二功率板和所述控制板之间,且所述第二导热硅脂层轮廓外边缘的至少部分与所述安装壳的内侧面抵接。
22、另一方面,本技术还提供了一种驱控方法,所述驱控方法利用所述的驱动装置执行,所述驱控方法包括:
23、在所述电机需执行第一工况时,通过所述控制板控制至少两块所述功率板驱动所述电机产生第一工作电流,以使所述电机在所述第一工况下工作;
24、在所述电机需执行第二工况时,通过所述控制板控制其中一块所述功率板驱动所述电机产生第二工作电流,以使所述电机在所述第二工况下工作。
25、进一步地,通过所述控制板控制其中一块所述功率板驱动所述电机产生第二工作电流的步骤包括:
26、通过所述控制板控制第一功率板驱动所述电机产生所述第二工作电流,所述第一功率板位于吸热组件靠近安装壳内侧壁的一侧。
27、进一步地,所述功率板包括第一功率板和第二功率板,所述控制板上设置有电路结构,所述电路结构包括控制电路、第一驱动电路和第二驱动电路,所述第一驱动电路电连接于所述控制电路与所述第一功率板之间,所述第二驱动电路与所述第一驱动电路并联并电连接于所述控制电路与所述第二功率板之间,通过所述控制板控制至少两块所述功率板驱动所述电机产生第一工作电流的步骤包括:
28、通过所述控制电路控制所述第一驱动电路驱动所述第一功率板工作,并通过所述控制电路控制所述第二驱动电路驱动所述第二功率板工作,以使所述第一功率板和所述第二功率板驱动所述电机产生所述第一工作电流。
29、进一步地,通过所述控制板控制其中一块所述功率板驱动所述电机产生第二工作电流的步骤包括:
30、通过所述控制电路控制所述第一驱动电路驱动所述第一功率板工作,以使所述第一功率板驱动所述电机产生所述第二工作电流。
31、另一方面,本技术还提供了一种机器人,所述机器人包括所述的驱动装置。
32、在本技术中,通过将吸热组件贴靠于相邻的两块功率板之间,使吸热组件可以较好地吸收并分散功率板产生的热量,减少热量的积聚,可以有效降低功率板的温度,极大地提高功率板的散热效率。本技术在通过控制板控制至少两块功率板同时驱动电机产生第一工作电流,以使电机在第一工作电流的作用下执行高爆发的第一工况的过程中,吸热组件不仅可及时带走靠近安装壳内侧壁的边缘处的功率板上的热量,还能够及时带走位于中间的不好散热的功率板(如控制板和吸热组件之间的功率板,和/或,位于距离控制板最远的功率板和控制板之间的功率板)上的热量,从而提高驱动装置在电机执行第一工况期间的散热效果。在通过控制板控制其中一块功率板驱动电机产生第二工作电流,以使电机在第二工作电流的作用下执行第二工况的过程中,由于只有一块功率板工作,所以驱动装置产生的较少的热量能够被吸热组件及时带走,使得驱动装置的散热效果更佳。
33、因此,本实施例中的吸热组件能够吸收功率板产生的热量,进而有效降低功率板的温升,还有利于延长功率板的使用寿命,大大降低驱动装置因过热导致的被烧损的风险。同时,吸热组件贴靠在相邻两块功率板之间,这样设置还能够更充分地利用安装壳内的竖向空间,既能保障驱动器的结构更加紧凑,又确保驱动器内具有足够的散热空间,较好地平衡了驱动器的安装空间与功率板的温升之间的冲突。
34、其中,相互并联设置的功率板可以分担电流负载,使得每块功率板上的电流密度降低,多块功率板并联后可为电机提供更大的电流,确保机器人可以稳定地完成高爆发工况。该驱动装置的电流承载能力能够得到显著地提升,驱动器可以为电机提供较大的电机扭矩输出能力和电流过载倍数。
- 还没有人留言评论。精彩留言会获得点赞!