多自由度转动机构、机器手、机器人的控制方法及系统、计算机可读存储介质与流程
本发明涉及机器人,尤其涉及的是一种多自由度转动机构、机器手、机器人的控制方法及系统、计算机可读存储介质。
背景技术:
1、随着机器人技术的发展,机器人得到广泛应用。机器人是自动执行工作的机器装置,主要由机械身体、记忆或程序功能和核心零件等组成。它既可以接受人类指挥控制,又可以运行预先编排的程序进行控制,也可以根据以人工智能技术制定的原则纲领进行控制。它的任务是协助或取代人类的工作,例如生产业、建筑业,或是危险的工作。机器人可以具有多个可以活动的肢体,通过肢体来执行相应任务和完成工作。
2、机器人的肢体通过转动展现不同姿态,从而执行多种不同任务。现有技术中,机器人的肢体通常采用单向转动控制,例如,公开号为cn109808791a的专利文献中,连接体通过转轴连接,实现两个相邻连接体的单向转动,并通过液压缸进行转动控制,虽然运动精度高,但是肢体的适应性较差,难以执行多种不同任务。
3、因此,现有技术还有待于改进和发展。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种多自由度转动机构、机器手、机器人的控制方法及系统、计算机可读存储介质,旨在解决现有技术中机器人的肢体通常采用单向转动控制,难以执行多种不同任务的问题。
2、本发明解决技术问题所采用的技术方案如下:
3、一种多自由度转动机构的控制方法,其中,所述多自由度转动机构包括:
4、基座;
5、活动组件,与所述基座活动连接;
6、第一驱动器和第二驱动器,均设置于所述基座,并与所述活动组件连接;
7、第一肢体,设置于所述活动组件;
8、其中,所述第一驱动器用于驱动所述活动组件活动,并带动所述第一肢体沿第一方向转动;
9、所述第二驱动器用于驱动所述活动组件活动,并带动所述第一肢体沿第二方向转动;
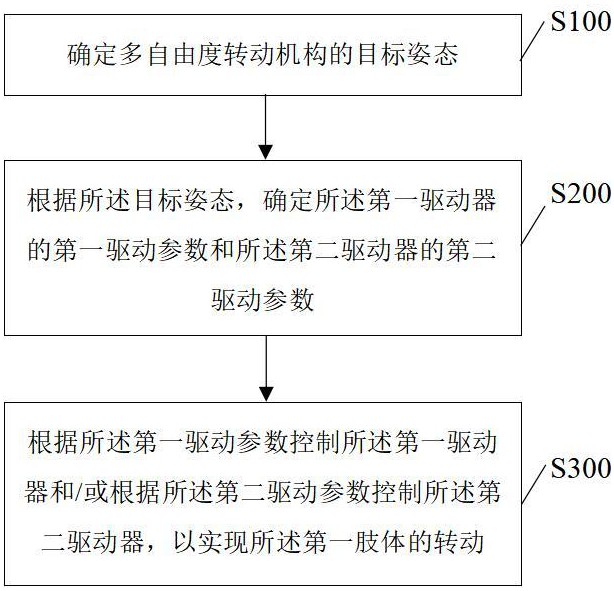
10、所述控制方法包括步骤:
11、确定多自由度转动机构的目标姿态;
12、根据所述目标姿态,确定所述第一驱动器的第一驱动参数和所述第二驱动器的第二驱动参数;
13、根据所述第一驱动参数控制所述第一驱动器和/或根据所述第二驱动参数控制所述第二驱动器,以实现所述第一肢体的转动。
14、所述的多自由度转动机构的控制方法,其中,所述活动组件包括:
15、第一转动架和第二转动架,均转动设置于所述基座;
16、第三转动架,与所述第二转动架转动连接;
17、连接杆,两端分别与所述第一转动架、所述第三转动架转动连接;
18、其中,所述第一转动架与所述第一驱动器连接,所述第二转动架与所述第二驱动器连接;
19、所述第一肢体设置于所述第三转动架;
20、所述第一驱动参数为所述第一转动架的第一转动角度,所述第二驱动参数为所述第二转动架的第二转动角度;
21、所述根据所述目标姿态,确定所述第一驱动器的第一驱动参数和所述第二驱动器的第二驱动参数,包括:
22、根据所述目标姿态,确定所述第一转动角度和所述第二转动角度。
23、所述的多自由度转动机构的控制方法,其中,所述多自由度转动机构还包括:
24、第二肢体,与第一肢体转动连接;
25、第三驱动器,设置于所述第一肢体;
26、转动轮,转动设置于所述第一肢体;
27、其中,所述转动轮抵靠于所述第二肢体;
28、所述第三驱动器用于驱动所述转动轮转动;
29、所述控制方法还包括:
30、根据所述目标姿态,确定所述第三驱动器的第三驱动参数;
31、根据所述第三驱动参数,控制所述第三驱动器,以转动所述第二肢体。
32、所述的多自由度转动机构的控制方法,其中,所述多自由度转动机构还包括:
33、扭矩传感器,用于检测所述转动轮或所述第三驱动器的扭矩;
34、控制器,分别与所述扭矩传感器、所述第一驱动器、所述第二驱动器、所述第三驱动器电连接;
35、所述控制方法还包括:
36、获取所述扭矩传感器采集的扭矩值;
37、根据所述扭矩值,控制所述第三驱动器驱动所述转动轮转动。
38、所述的多自由度转动机构的控制方法,其中,所述根据所述扭矩值,控制所述第三驱动器驱动所述转动轮转动,包括:
39、当所述扭矩值小于或等于第一预设扭矩值时,控制所述第三驱动器驱动所述转动轮转动第一预设角度。
40、所述的多自由度转动机构的控制方法,其中,所述根据所述扭矩值,控制所述第三驱动器驱动所述转动轮转动,还包括:
41、当所述扭矩值大于或等于第二预设扭矩值时,控制所述第三驱动器驱动所述转动轮逐渐转动;其中,所述第二预设扭矩值大于所述第一预设扭矩值。
42、所述的多自由度转动机构的控制方法,其中,所述控制方法还包括:
43、根据所述扭矩值,控制所述第一驱动器驱动所述第一肢体转动。
44、所述的多自由度转动机构的控制方法,其中,所述根据所述扭矩值,控制所述第一驱动器驱动所述第一肢体转动,包括:
45、当所述扭矩值小于或等于第一预设扭矩值时,控制所述第一驱动器驱动所述第一肢体转动第二预设角度;
46、当所述扭矩值大于或等于第二预设扭矩值时,控制所述第一驱动器和/或所述第二驱动器驱动所述第一肢体逐渐活动。
47、一种多自由度转动机构的控制系统,包括存储器和处理器,所述存储器存储有计算机程序,其中,所述处理器执行所述计算机程序时实现权如上任一项所述的控制方法的步骤。
48、一种计算机可读存储介质,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现如上任一项所述的控制方法的步骤。
49、一种机器手的控制方法,其中,所述机器手包括:
50、基座;
51、活动组件,与所述基座活动连接;
52、第一驱动器和第二驱动器,均设置于所述基座,并与所述活动组件连接;
53、第一肢体,设置于所述活动组件;
54、其中,所述第一驱动器用于驱动所述活动组件活动,并带动所述第一肢体沿第一方向转动;
55、所述第二驱动器用于驱动所述活动组件活动,并带动所述第一肢体沿第二方向转动;
56、所述控制方法包括步骤:
57、确定机器手的目标姿态;
58、根据所述目标姿态,确定所述第一驱动器的第一驱动参数和所述第二驱动器的第二驱动参数;
59、根据所述第一驱动参数控制所述第一驱动器和/或根据所述第二驱动参数控制所述第二驱动器,以实现所述第一肢体的转动。
60、一种机器人的控制方法,其中,所述机器人包括:
61、基座;
62、活动组件,与所述基座活动连接;
63、第一驱动器和第二驱动器,均设置于所述基座,并与所述活动组件连接;
64、第一肢体,设置于所述活动组件;
65、其中,所述第一驱动器用于驱动所述活动组件活动,并带动所述第一肢体沿第一方向转动;
66、所述第二驱动器用于驱动所述活动组件活动,并带动所述第一肢体沿第二方向转动;
67、所述控制方法包括步骤:
68、确定机器人的目标姿态;
69、根据所述目标姿态,确定所述第一驱动器的第一驱动参数和所述第二驱动器的第二驱动参数;
70、根据所述第一驱动参数控制所述第一驱动器和/或根据所述第二驱动参数控制所述第二驱动器,以实现所述第一肢体的转动。
71、有益效果:本技术通过目标姿态,确定第一驱动器和第二驱动器的驱动参数,并根据驱动参数分别控制第一驱动器和/或第二驱动器,实现第一肢体沿不同方向转动控制,多自由度转动机构呈现多种不同的目标姿态,第一肢体的控制更加灵活,从而完成多种不同的任务。
- 还没有人留言评论。精彩留言会获得点赞!