一种并联机器人在玻璃幕墙施工终端的辅助控制方法与流程
本发明涉及玻璃幕墙安装,具体为一种并联机器人在玻璃幕墙施工终端的辅助控制方法。
背景技术:
1、玻璃幕墙是指由支撑结构体系可相对主体结构有一定位移能力、不分担主体结构所受作用的建筑外围护结构或装饰结构,其是一种美观新颖的建筑墙体装饰方法,是现代主义高层建筑时代的显著特征,墙体有单层和双层玻璃两种,有轻巧美观、不易污染、节约能源等优点,传统玻璃幕墙安装机器方式主要是在楼顶安装吊装装置,通过绳索绑定玻璃幕墙后悬吊下来,或是使用脚手架吊篮将工人与玻璃幕墙一起送下去,以这种方式进行安装,存在工作效率低,工作经验要求高,工作风险大等问题;而使用吊车+“吸盘”的方式进行安装的方法效率低下,工作空间小,不适宜进行快速安装。
2、现有的市场上玻璃幕墙安装机器人在运动方面,主要通过在楼顶安装悬臂梁,钢丝绳索卷机悬吊玻璃幕墙,由于需要在楼顶安装吊装装置,所以对楼宇会存在一定损伤,而且布置时间过长致使整体作业效率低,且由于只在一个方向存在约束,其玻璃幕墙以及安装吊篮稳定性差,安全系数低;使用吊车+“吸盘”安装的方式,主要通过在吊车臂末端安装吸盘运送玻璃幕墙进行安装,每次安装需要重新调整吊车位置,安装效率低,且对技术工人的要求较高。
技术实现思路
1、针对现有技术的不足,本发明提供了一种并联机器人在玻璃幕墙施工终端的辅助控制方法,解决了由于施工中需要安装的玻璃多,被安装的楼也较高,所以机器人所需要的工作空间较大,工作空间小,不适宜进行快速安装的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种并联机器人在玻璃幕墙施工终端的辅助控制方法,具体包括以下步骤:
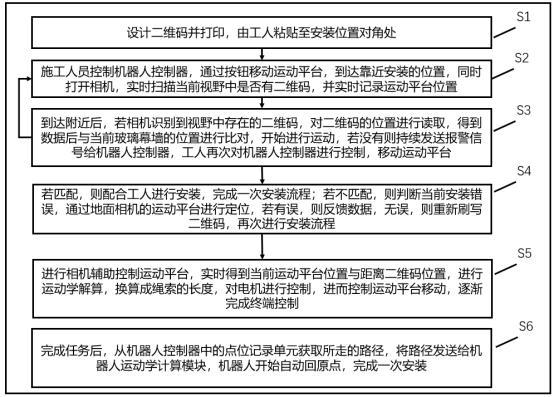
3、s1、设计二维码并打印,由工人粘贴至安装位置对角处;
4、s2、施工人员控制机器人控制器,通过按钮移动运动平台,到达靠近安装的位置,同时打开相机,实时扫描当前视野中是否有二维码,并实时记录运动平台位置;
5、s3、到达附近后,若相机识别到视野中存在的二维码,对二维码的位置进行读取,得到数据后与当前玻璃幕墙的位置进行比对,开始进行运动,若没有则持续发送报警信号给机器人控制器,工人再次对机器人控制器进行控制,移动运动平台;
6、s4、若匹配,则配合工人进行安装,完成一次安装流程;若不匹配,则判断当前安装错误,通过地面相机的运动平台进行定位,若有误,则反馈数据,无误,则重新刷二维码,再次进行安装流程;
7、s5、进行相机辅助控制运动平台,实时得到当前运动平台位置与距离二维码位置,进行运动学计算,换算成绳索的长度,对电机进行控制,进而控制运动平台移动,逐渐完成终端控制;
8、s6、完成任务后,从机器人控制器中的点位记录单元获取所走的路径,将路径发送给机器人运动学计算模块,机器人开始自动回原点,完成一次安装。
9、优选的,所述s1中设定二维码,在电脑端对二维码数据进行烧写,里面包含各个玻璃幕墙安装的位置信息。
10、优选的,所述s2中,将相机安装在机器人运动平台的上部,调整深度相机的视野覆盖运动平台前方的工作空间,对相机的内参进行调整,消除畸变所带来的影响,同时安装二维码识别模块和深度测量模块,使得相机有识别二维码与测量长度的能力,所述二维码识别模块获取为空集的黑色像素点集合,作为目标黑色像素点集合,获取目标黑色像素点集合对应的二维码基准图片的二维码信息,作为待识别二维码图像的二维码信息。
11、优选的,所述深度测量模块用于根据相机拍摄的编码图案序列,计算待测对象在相机坐标系下的结构光解码深度图像,包括:
12、利用相机拍摄的编码图案序列,i=1,2,...,,计算相机成像平面下任一像素坐标()的多周期编码相位与单周期编码相位,表达式如下:
13、;
14、式中,为相机拍摄的第i张双频相移结构光编码图案;
15、通过相位解包裹计算坐标的绝对相位;
16、;
17、式中,tm,ts分别为多周期编码图案与单周期编码图案的周期像素长度,[*]为就近取整运算符;
18、根据、相机和结构光投影模块的内参矩阵、相机与结构光投影模块之间的坐标转换矩阵,利用三角测量法计算得到待测对象在相机坐标系下的结构光解码深度图像。
19、优选的,所述s3中在运动平台安装终端与相机相连,安装无线传输模块与下面设置的机器人控制器进行无线通讯,并在机器人控制器中设置有点位记录单元,可以记录所走过的路径,以坐标点的形式存储在机器人控制器中,并对路径进行规划,同时在机器人控制器中设定报警单元,当相机看不到二维码时进行报警,反馈未识别到相机信号,人工进行干预,同时编写程序,在机器人控制器控制运动平台的基础上,加入视觉进行辅助控制,在原有的基础上进行叠加,完成整个机器人的控制。
20、优选的,所述对机器人运动平台路径进行规划的操作为:
21、b1、获取机器人运动平台位于预设的环境感知模型中的起始点坐标和目标点坐标;
22、b2、以所述起始点坐标与所述目标点坐标之间的路径长度最短为优化目标条件,并通过确定约束条件,构建路径规划模型;
23、b3、基于强化学习和寻优算法,对所述路径规划模型进行寻优求解,根据最优解确定所述机器人运动平台的最优规划路径。
24、优选的,所述s3中,得到数据后与当前玻璃幕墙的位置进行比对,比对的结果为:
25、结果一、若二维码存在,则进行下一步;
26、结果二、若不存在,则启动报警系统,发送报警信号给机器人控制器,并停止运行;
27、工人收到报警信息后,继续进行手动控制模式,对运动平台进行控制,移动运动平台,相机持续对二维码进行扫描,如果找到二维码,则发送信号给机器人控制器,再次进行辅助控制。
28、优选的,所述s5的具体操作为:
29、s51、相机找到二维码,对二维码进行扫描,得到与二维码相差的向量值,之后将其转化为索驱动并联机器人绳索长度值,自动对机器人的绳索进行控制,在这里使用pd控制;
30、s52、在一次控制之后继续使用相机进行扫描,对绳索长度的控制量进行迭代控制,直到达到应到达的位置,完成相机辅助控制;
31、s53、同时持续记录运动平台所在的位置,在完成后,按照所记录的出发点进行示教性的返回,完成一次安装过程。
32、本发明提供了一种并联机器人在玻璃幕墙施工终端的辅助控制方法。与现有技术相比具备以下有益效果:
33、、该并联机器人在玻璃幕墙施工终端的辅助控制方法,通过使用相机来对玻璃幕墙安装机器人进行辅助控制,使用两段式机器人控制方式来对机器人进行控制,控制方案简单,操作流程简单,同时也当前运动平台的位置进行判断,在未到达时发送警报信息,达到节约成本,解决了现有安装玻璃幕墙过程中易出现安装流程困难导致工期延误以及降低在安装过程中的人力成本等所需要的问题。
34、、该并联机器人在玻璃幕墙施工终端的辅助控制方法,通过找到索驱动并联机器人运动平台在玻璃幕墙安装的位置,减少控制的复杂程度,减少索驱动并联机器人在安装时的控制精度要求,减少了工人的成本,降低使用门槛,通过相机来进行辅助定位,价格便宜,减少了使用成本,同时加快了安装效率,能够快速对玻璃幕墙进行快速安装,提高使用效率。
- 还没有人留言评论。精彩留言会获得点赞!