一种基于人工智能的铸件清理机器人自主决策辅助系统的制作方法
本发明涉及铸件清理,具体涉及一种基于人工智能的铸件清理机器人自主决策辅助系统。
背景技术:
1、在铸造行业中,铸件清理是生产过程中的关键环节。传统的铸件清理方式主要依赖人工操作,然而这种方式存在诸多弊端。
2、现有技术中,将大型铸件划分成若干单元分别打磨,频繁移动铸件或机器人来切换打磨单元,这不仅过程繁琐而且效率低下,也不能快速分析铸件并自动规划高效的打磨路径;在打磨质量方面,现有技术依赖人工拖拽示教或离线编程,容易因人工操作差异及模型与实际不符导致质量不稳定,并且也未借助智能控制算法,实时监测铸件表面的平整度;对于操作人员,现有技术要求具备较高专业技能,无论是人工示教还是离线编程都增加了人力成本和培训难度,面对铸件实际情况变化难以快速调整。
3、为此,本发明提供一种基于人工智能的铸件清理机器人自主决策辅助系统。
技术实现思路
1、本发明的目的在于提供一种基于人工智能的铸件清理机器人自主决策辅助系统,以解决上述背景中问题。
2、本发明的目的可以通过以下技术方案实现:
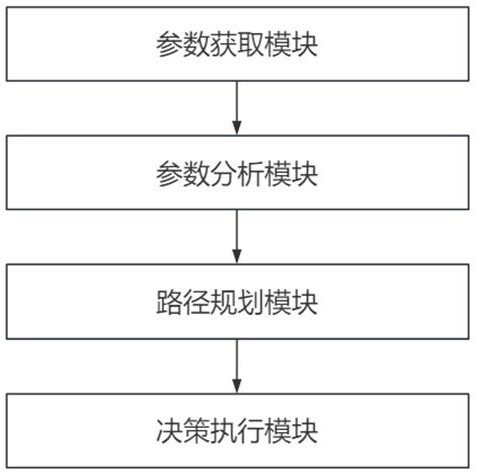
3、一种基于人工智能的铸件清理机器人自主决策辅助系统,包括:
4、参数获取模块:获取子区块的尺寸及凹凸度信息,计算得到获得区域平整度pz,区域平整度pz≤区域平整度阈值pzy,将子区块标记为优先处理区块;
5、参数分析模块:获取区域平整度pz与阈值pzy的差值,计算得到平整差接近比pj,计算优先处理区块内子区块的凹陷、凸起密度,得到区块凹凸比,根据子区块凹凸比均值,计算得到区块凹凸差值比czb,基于平整差接近比pj和区块凹凸差值比czb,计算优先清理系数yx,优先清理系数yx≥优先清理系数阈值yxz,将优先处理区块标记为待清理区块;
6、路径规划模块:基于待清理区块,使用人工智能领域中的聚类算法、a*算法构建ai清理路径模型,计算得到待清理区块的清理路径;
7、决策执行模块:获取铸件清理机器人的清理时间,进一步计算得到清理时间比sj,基于清理路径的区域平整度pz,得到路径清理比ql,基于清理时间比sj和路径清理比ql,计算决策路径系数jc,并选取最优清理路径,控制铸件清理机器人根据最优清理处理路径清理铸件表面。
8、作为本发明进一步的技术方案:所述区域平整度pz的获取方式为:
9、基于凸起数量比tq、凹陷数量比ax、凹凸面积比mj计算区域平整度pz;
10、通过公式:,获取区域平整度pz,其中a1、a2、a3为预设比例系数。
11、作为本发明进一步的技术方案:所述凸起数量比tq、凹陷数量比ax的获取方式为:
12、获取铸件的检测模型,将铸件检测模型的表面划分为多个区块,得到子区块;
13、获取子区块内凸起、凹陷数量,将子区块内凸起和凹陷数量求和处理,得到凹凸数量和;
14、将凸起、凹陷数量分别与凹凸数量和作比值处理,得到子区块凸起数量比、凹陷数量比;
15、将子区块凸起数量比标记为tq、凹陷数量比标记为ax;
16、所述凹凸面积比mj的获取方式为:
17、获取子区块内凸起、凹陷的面积,将子区块内的凸起、凹陷面积求和处理,得到凹凸面积总和;
18、将凹凸面积总和与子区块的面积进行比值处理,得到凹凸面积比,将凹凸面积比标记为mj。
19、作为本发明进一步的技术方案:所述优先处理区块的获取方式为:
20、将区域平整度pz与区域平整度阈值pzy进行比较;
21、若区域平整度pz≤区域平整度阈值pzy,将子区块标记为优先处理区块。
22、作为本发明进一步的技术方案:所述优先清理系数yx的获取方式为:
23、基于平整差接近比pj、区块凹凸差值比czb,计算优先清理系数yx;
24、通过公式:,计算得到优先清理系数yx,其中b1、b2为预设比例系数;
25、所述待清理区块的获取方式为:
26、将优先清理区块的优先清理系数yx,与优先清理系数阈值yxz进行比较;
27、若优先清理系数yx≥优先清理系数阈值yxz,将优先处理区块标记为待清理区块。
28、作为本发明进一步的技术方案:所述平整差接近比pj的获取方式为:
29、获取优先处理区块的区域平整度pz与区域平整度阈值pzy的差值,得到平整度差值;
30、将平整度差值与区域平整度阈值pzy进行比值处理,得到平整差接近比,将平整差接近比标记为pj。
31、作为本发明进一步的技术方案:所述区块凹凸差值比czb的获取方式为:
32、基于优先处理区块内,将子区块的凹陷数量与子区块面积进行比值处理,得到区块凹陷密度;
33、将子区块内凸起数量与子区块的面积进行比值处理,得到区块凸起密度;
34、将区块凹陷密度与区块凸起密度进行比值处理,得到区块凹凸比;
35、获取全部子区块的区块凹凸比,将全部子区块的区块凹凸比进行求和取均值处理,得到凹凸比均值;
36、将区块凹凸比与凹凸比均值作差并取绝对值处理,得到区块凹凸比差值;
37、将区块凹凸比差值与凹凸比均值作比值处理,得到区块凹凸差值比,将区块凹凸差值比标记为czb。
38、作为本发明进一步的技术方案:所述ai清理路径模型的获取方式为:
39、s1:将待清理区块进行聚类分析,将区块凹凸差值比czb和平整差接近比pj作为参数值,采用k-means算法将参数值大小相近的区块分为一个聚类;
40、s2:计算每个待清理区块到各个聚类中心的距离,将每个待清理区块,分配到距离最近的聚类中心所属的聚类中,并更新距离中心;
41、s3:重复s2,直至聚类中心的位置变化达到设定的迭代次数100,将平整差接近比pj最小的区块作为起始区块;
42、s4:对于每个聚类,使用路径规划中的a*算法,以聚类起始区块为起点,直至聚类内的待清理区块全部被访问过,在每个聚类内找到一条清理路径。
43、作为本发明进一步的技术方案:所述决策路径系数jc的获取方式为:
44、基于清理时间比sj、路径清理比ql,计算决策路径系数jc;
45、通过公式:,计算决策路径系数jc,其中b1、b2为预设比例系数;
46、所述最优清理路径的获取方式为:
47、获取待清理区块的全部清理路径的决策路径系数jc,将决策路径系数jc按照从大到小的顺序,选取决策路径系数jc的最大值,得到最优清理路径;
48、使用铸件清理机器人,按照最优清理路径对铸件表面进行清理。
49、作为本发明进一步的技术方案:所述清理时间比sj、路径清理比ql的获取方式为:
50、基于ai清理路径模型,获取每个聚类的内的清理路径,得到待清理路径;
51、计算待清理路径的长度,得到清理路径长度;
52、获取铸件清理机器人的清理速度,得到铸件清理速度;
53、将清理路径长度与铸件清理速度作比值处理,得到铸件清理时间;
54、将铸件清理时间与铸件清理时间阈值进行比值处理,得到清理时间比,将清理时间比标记为sj;
55、获取待清理区块的清理路径的区域平整度pz,计算清理路径上区域平整度pz总和,得到路径平整度总和;
56、获取待清理区块的区域平整度pz,计算待清理区块上区域平整度pz总和,得到区块平整度总和;
57、将路径平整度总和与区块平整度总和进行比值处理,得到路径清理比,将路径清理比标记为ql。
58、本发明的有益效果:
59、使用参数获取模块获取子区块信息计算区域平整度,区分优先处理区块和待处理区块,参数计算模块进一步基于平整差接近比和区块凹凸差值比,计算优先清理系数,确定待清理区块,路径规划模块通过构建ai清理路径模型,规划清理路径,相比传统依赖人工经验或简单编程的方式,极大提高了路径规划的合理性和精准性,有效缩短了清理路径长度,提升了清理效率;
60、通过计算清理时间比和路径清理比得出决策路径系数jc,从而确定最优清理路径,提高了清理效率,使铸件表面的清理质量更加均匀。同时,对于待处理区块也能采用同样的智能决策流程,进一步增强了系统对不同区块情况的适应性,克服了现有技术在面对铸件变化时灵活性不足的问题,有效提高了铸件清理的整体质量和智能化水平。
- 还没有人留言评论。精彩留言会获得点赞!