一种工业巡检机器人
本发明涉及巡检机器人,具体为一种工业巡检机器人。
背景技术:
1、目前,为了保证工厂车间内的生产安全,一般会采用巡检机器人来回巡视,一般巡检机器人分为半空中轨道式的和地面上自由活动的,轨道式的巡检机器人活动轨迹固定,无法根据需要自由调整巡检轨迹,而地面上自由活动的机器人虽然活动轨迹方便调整,但是由于其在地面活动,容易和其他设备相互阻碍,因此,半空中轨道式的和地面上自由活动的巡检机器人适用性均一般。
技术实现思路
1、本发明要解决的技术问题是克服现有的缺陷,提供一种工业巡检机器人,即可以沿着巡检轨道在半空中对工厂车间进行巡检,也可以从巡检轨道下到地面上自由活动,巡检轨迹方便根据需要调整,可以有效解决背景技术中的问题。
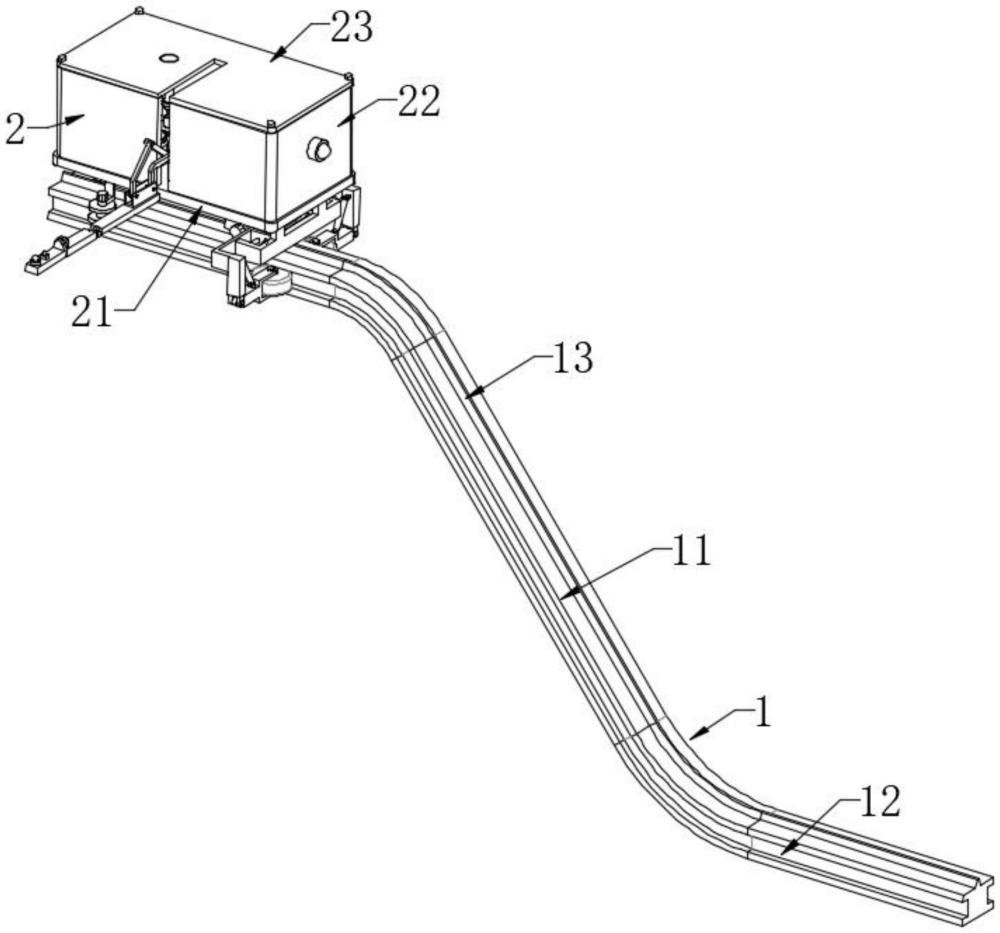
2、为实现上述目的,本发明提供如下技术方案:一种工业巡检机器人,包括巡检轨道,所述巡检轨道包含有轨道主体,所述轨道主体包括高空巡检段、倾斜段和落地段,高空段和落地段均水平设置,所述轨道主体的两侧分别开设有侧导槽,且轨道主体的顶部设置有凸条,还包括:
3、机器人主体,包含有座板,所述座板的顶部边沿固定连接有侧壳,侧壳的顶部可拆卸安装有壳盖,所述侧壳的一侧开设有侧缺口,所述壳盖的一侧开设有与侧缺口对应的顶缺口,且壳盖的后侧开设有圆孔;
4、轮距同步控制机构,安装在座板的底部前端,且轮距同步控制机构的两端分别安装有两个折叠式行进机构;
5、行进动力机构,安装在座板上,行进动力机构的顶部安装有随动视觉机构,所述随动视觉机构与圆孔对应设置;
6、巡检部件伸出机构,安装在座板上,所述巡检部件伸出机构与侧缺口对应设置,且巡检部件伸出机构连接巡检机构。
7、轨道主体上的高空巡检段在工厂车间的半空中分布,轮距同步控制机构带动两个折叠式行进机构相互靠近,让折叠式行进机构与轨道主体两侧的侧导槽滚动配合,行进动力机构与轨道主体上的凸条滚动配合,行进动力机构工作让机器人主体沿着轨道主体上的高空巡检段在半空中行进,此时巡检部件伸出机构让巡检机构从侧壳的侧缺口内伸出,且让巡检机构下垂,此时巡检机构位于座板的下侧方,借助巡检机构对工厂车间进行巡检,落地段可以设置在工厂车间的空地处,机器人主体沿着倾斜段可以下落至落地段,下落过程中巡检部件伸出机构将巡检机构抬升,让巡检机构位于壳盖的上侧方,然后折叠式行进机构接触地面,随着行进动力机构继续行进,行进动力机构与凸条和轨道主体脱离,然后行进动力机构接触地面,随着行进动力机构的工作可以控制该工业巡检机器人在地面上向后行进,随动视觉机构能够随着该工业巡检机器人向后行进时方向的改变而改变,从而提供该工业巡检机器人行进方向的视野,利于该工业巡检机器人避开障碍。
8、进一步的,所述轮距同步控制机构包含有安装板、拱形架、对向同步移动组件和弯架,所述座板的底部前端通过安装板固定连接有拱形架,拱形架内通过对向同步移动组件连接两个弯架相互靠近的一端。安装板用于设置拱形架,拱形架用于安装对向同步移动组件,对向同步移动组件能够控制两个弯架相互靠近或者相互远离。
9、进一步的,所述折叠式行进机构包含有折叠电动伸缩杆,两个弯架相互远离的一端分别固定连接两个立杆的顶端,两个立杆的底端分别通过纵向的折叠轴活动连接两个折叠杆的一端,两个折叠杆的另一端分别固定连接有两个轮架一,两个轮架一内分别转动连接有两个导轮,两个导轮分别与两个侧导槽滚动连接,两个立杆相互靠近的一侧分别固定连接有两个活动座一,两个活动座一分别活动连接两个折叠电动伸缩杆的一端,两个折叠杆相互靠近的一侧分别固定连接有两个活动座二,两个活动座二分别活动连接对应的两个折叠电动伸缩杆的另一端。
10、需要在轨道主体上活动时,折叠电动伸缩杆缩短,拉动折叠杆通过折叠轴相对于立杆活动,让折叠杆与立杆垂直设置,对向同步移动组件通过两个弯架带动两个导轮伸入两个侧导槽内,可以让该工业巡检机器人稳定的沿着轨道主体活动,需要让该工业巡检机器人在地面上自由活动时,对向同步移动组件先通过两个弯架带动两个导轮相互远离,然后折叠电动伸缩杆伸长,让折叠杆处于竖直状态,能够让两个导轮分别与地面滚动接触,此时对向同步移动组件带动两个导轮再次相互靠近能够让该工业巡检机器人的宽度减小,适合在较窄的地面通道行进。
11、进一步的,所述行进动力机构包含有综合动力电机、摆动控制组件和转向动力组件,所述座板的后端通过轴承转动连接有竖向的转向轴,转向轴的顶部外周侧连接转向动力组件,所述转向轴的底端固定连接方向控制圆盘的中部,所述方向控制圆盘的底部中心固定连接有活动座三,所述活动座三活动连接摆杆的顶端,所述摆杆的底端固定连接有轮架二,轮架二内转动连接有动力轮,所述动力轮的一端固定连接综合动力电机的输出轴,综合动力电机安装在轮架二的侧面,所述动力轮的底部与轨道主体的上侧滚动连接,所述动力轮的中部外周侧开设有与凸条配合的防脱环形槽,所述方向控制圆盘的底部前侧通过摆动控制组件连接摆杆的前侧。
12、防脱环形槽与凸条配合,让动力轮能沿着轨道主体稳定行进,综合动力电机工作带动动力轮转动,动力轮沿着轨道主体滚动可以带动机器人主体沿着轨道主体行进,当该工业巡检机器人主体位于落地段准备下地时,综合动力电机工作让动力轮与落地段前端脱离,然后摆动控制组件控制摆杆处于竖直状态,此时动力轮与地面滚动接触,综合动力电机工作带动动力轮在地面上滚动,可以让机器人主体在地面上向后行进,需要注意为了更好的控制方向,机器人主体在地面上行进时要确保行进动力机构朝着行进的方向,此时借助行进动力机构上的随动视觉机构可以提供行进方向的视野,需要转向时则转向动力组件控制方向控制圆盘、转向轴相对于机器人主体转动,从而改变动力轮的方向,也就可以改变机器人主体行进的方向。
13、进一步的,所述摆动控制组件包含有摆动电动伸缩杆和活动座五,所述方向控制圆盘的底部前侧设置有活动座四,所述活动座四活动连接摆动电动伸缩杆的一端,所述摆杆的前侧固定连接有活动座五,所述活动座五活动连接摆动电动伸缩杆的另一端。
14、当机器人主体在轨道主体上活动时,摆动电动伸缩杆缩短,让摆杆倾斜设置,让防脱环形槽与凸条配合的同时保持机器人主体处于水平状态,当机器人主体需要到地面上活动时,摆动电动伸缩杆伸长,让摆杆处于竖直状态,让动力轮接触地面的同时让机器人主体保持水平状态。
15、进一步的,还包括轨道稳固附着机构,所述轨道稳固附着机构包含有轨道夹紧动力组件、附着轮、轨道动力电机和附着环形槽,所述座板的后端底部固定连接有两个底杆,两个底杆底部之间固定连接有横向的方导杆,方导杆的两端分别与两个弯板上的矩形滑孔滑动连接,且方导杆的中部套接有压缩弹簧,两个弯板的底端分别转动连接有两个竖向的附着轮,两个附着轮的外周侧分别开设有两个附着环形槽,两个附着环形槽分别与轨道主体的顶部两侧滚动配合,附着轮的顶部固定连接轨道动力电机的输出轴,轨道动力电机安装在对应的弯板上,座板的后端安装有轨道夹紧动力组件。轨道夹紧动力组件可以带动两个弯板沿着方导杆相互靠近,此时压缩弹簧被压缩,两个附着轮上的两个附着环形槽与轨道主体的顶部两侧配合,可以避免机器人主体与轨道主体脱离,轨道动力电机工作可以带动对应的附着轮转动,可以为机器人主体在轨道主体上的行进提供动力,需要离开轨道主体时,轨道夹紧动力组件脱离与两个弯板的接触,压缩弹簧让两个弯板沿着方导杆相互远离,此时两个附着轮脱离轨道主体。
16、进一步的,所述轨道夹紧动力组件包含有竖滑杆、顶杆、竖电动伸缩杆和控制斜面,座板的后端左右两侧分别开设有两个滑杆孔,两个滑杆孔内分别竖向滑动连接有两个竖滑杆,两个竖滑杆的顶部分别固定连接顶杆的两端,所述座板的后端上侧安装有竖电动伸缩杆,竖电动伸缩杆的顶部连接顶杆的中部,两个竖滑杆的底端相互靠近的一侧分别设置有两个控制斜面,两个控制斜面分别与两个弯板顶部相互远离的一侧摩擦接触。
17、竖电动伸缩杆缩短能够带动顶杆和竖滑杆下降,两个竖滑杆通过两个控制斜面可以挤压着两个弯板沿着方导杆相互靠近,竖电动伸缩杆伸长能够顶杆和竖滑杆上升,能够让两个竖滑杆与两个弯板脱离。
18、进一步的,所述随动视觉机构包含有随动摄像头,转向轴的顶端固定连接竖向的棱杆,所述棱杆顶部竖向滑动套接有竖筒,竖筒的底部外周侧转动套接有随动环,随动环通过随动杆连接顶杆,所述竖筒的顶端安装有随动摄像头,且随动摄像头的顶部安装有与圆孔对应的圆盖。当机器人主体在轨道主体上时,由于沿着轨道主体按既定轨迹行进,因此不需要提供行进方向的视野,且此时竖电动伸缩杆为缩短状态,此时竖筒随着竖电动伸缩杆的顶部下移,此时圆盖将圆孔封闭,保持机器人主体顶部的平齐状态,当机器人主体在地面上行进时,竖电动伸缩杆伸长让两个附着轮脱离轨道主体,竖电动伸缩杆继续伸长,通过随动杆和随动环带动竖筒相对于棱杆上移,可以让随动摄像头从圆孔内伸出,此时随动摄像头朝向后方,机器人主体在地面上也向后方行进,借助随动摄像头提供行进方向的视野,利于避开障碍,当转向动力组件控制方向控制圆盘和转向轴转向时,转向轴通过棱杆和竖筒也带动随动摄像头转向,让随动摄像头始终朝着要行进的方向。
19、进一步的,所述巡检部件伸出机构包含有一百八十度翻动组件和伸出板,所述座板上安装有一百八十度翻动组件,一百八十度翻动组件连接伸出板的一端,伸出板与侧缺口对应设置,所述伸出板的另一端连接巡检部件。当机器人主体在轨道主体上时,由于机器人主体处于半空中,此时一百八十度翻动组件让伸出板朝下设置,让巡检部件位于机器人主体的下侧方,借助巡检部件在半空中对工厂车间的异常状况进行巡检,当机器人主体在地面上时,一百八十度翻动组件带动伸出板翻动一百八十度,让伸出板朝向设置,让巡检部件位于机器人主体的上侧方,从而在地面上完成对周围环境的巡检工作。
20、进一步的,所述巡检部件包含有翻转板、扭转长板、翻转动力组件和扭转动力组件,所述伸出板远离一百八十度翻动组件的一端通过翻转动力组件连接翻转板的一端,所述翻转板的另一端通过扭转动力组件连接扭转长板,所述扭转长板的侧面分别安装有巡检红外线探头和巡检摄像头。翻转动力组件能够带动翻转板相对于伸出板活动,改变伸出板和翻转板之间的夹角,扭转动力组件用于带动扭转长板相对于翻转板的端部转动,从而改变巡检红外线探头和巡检摄像头的朝向,让巡检红外线探头和巡检摄像头的巡检方向更加自由,巡检红外线探头用于快速检测火灾,巡检摄像头用于提供摄像功能,不需要使用巡检红外线探头和巡检摄像头时,借助一百八十度翻动组件让伸出板处于侧缺口内,将侧缺口封闭,同时让翻转板和扭转长板将顶缺口封闭,此时巡检红外线探头和巡检摄像头均处于侧壳的内部,可以让壳盖的顶部更加整洁,同时也能保护处于侧壳内部的巡检红外线探头和巡检摄像头。
21、与现有技术相比,本工业巡检机器人的有益效果是:
22、1、轨道主体上的高空巡检段在工厂车间的半空中分布,轮距同步控制机构带动两个折叠式行进机构相互靠近,让折叠式行进机构与轨道主体两侧的侧导槽滚动配合,行进动力机构与轨道主体上的凸条滚动配合,行进动力机构工作让机器人主体沿着轨道主体上的高空巡检段在半空中行进,此时巡检部件伸出机构让巡检机构从侧壳的侧缺口内伸出,且让巡检机构下垂,此时巡检机构位于座板的下侧方,借助巡检机构对工厂车间进行巡检;
23、2、机器人主体沿着倾斜段可以下落至落地段,下落过程中巡检部件伸出机构将巡检机构抬升,让巡检机构位于壳盖的上侧方,然后折叠式行进机构接触地面,随着行进动力机构继续行进,行进动力机构与凸条和轨道主体脱离,然后行进动力机构接触地面,随着行进动力机构的工作可以控制该工业巡检机器人在地面上向后行进,随动视觉机构能够随着该工业巡检机器人向后行进时方向的改变而改变,从而提供该工业巡检机器人行进方向的视野,利于该工业巡检机器人避开障碍;
24、3、即可以沿着巡检轨道在半空中对工厂车间进行巡检,也可以从巡检轨道下到地面上自由活动,巡检轨迹方便根据需要调整。
- 还没有人留言评论。精彩留言会获得点赞!