一种船舶喷涂机器人外板喷涂调平控制系统及其工作方法与流程
本发明属于自动控制,具体涉及一种船舶喷涂机器人外板喷涂调平控制系统及其工作方法。
背景技术:
1、船舶涂装作业在船舶建造和维护中起着至关重要的作用。传统船舶喷涂作业采用人工手持喷枪进行喷涂,这种方式不仅存在自动化程度低、工程作业成本高、高位作业安全隐患风险较大、环境污染严重等问题,且喷涂质量直接受工人的作业经验影响,在阴雨潮湿的环境中工人运用此喷涂方式又无法维持原有的作业效率,严重阻碍了船舶智能化的发展方向。
2、随着船舶涂装设计技术的创新和发展以及应用场景需求,市场中衍生出多种喷涂方式,如大流量低压力雾化喷涂、自动喷涂、多组喷涂等,这些技术在喷涂过程中无法保持水平持续喷涂作业,导致油漆重叠面膜厚一致性较差,且无法在天气恶劣、风速较大的情况下作业,鉴于上述喷涂控制的现状,亟需新技术、新工艺、新装备替换现有喷涂作业方式。
3、本发明采用船舶外板喷涂自动调平控制系统,利用can总线将系统采集信号实时传输至控制中心,通过多角度支架调整机构、滑台移动机构以及末端机械臂间相互配合实现装置调平,保证漆料喷嘴在竖直及水平方向上距船舶外板在一定范围内,从而达到外板漆面厚度一致,提高喷涂效率,减少人工投入的目的。
4、现有的调平系统及装置,存在水平调节范围较小、系统功能单一、对船舶外板喷涂作业适用性较差等问题,如专利cn108112293a,提供了一种液压调平装置,现有的专利提及的关于调平装置,如cn218323996u提供了一种装配式墙体的定位调平装置,包括墙体定位柱,所述墙体定位柱包括有左侧定位柱与右侧定位柱,所述左侧定位柱位于右侧定位柱一侧,所述墙体定位柱下表面固定安装有支撑底座,所述支撑底座一侧外表面固定安装有第一连接伸缩柱,所述墙体定位柱一侧外表面开设有限位凹槽,所述限位凹槽内部活动安装有限位块,所述限位块一侧外表面固定安装有限位连接板,所述限位连接板另一侧外表面固定安装有电动伸缩柱。该装置解决了安装墙体的位置以及对地面调平的问题,但设备存在水平调节范围较小、系统功能单一,从而针对船舶外板喷涂作业适用性较差。
技术实现思路
1、发明目的:为了解决现有技术的不足,本发明提供了一种船舶喷涂机器人外板喷涂调平控制系统及其工作方法。
2、技术方案:一种船舶喷涂机器人外板喷涂调平控制系统,包括:信号采集单元、信号处理单元、控制中心及执行机构;系统利用can总线将经信号处理单元处理的信息传输至控制中心,系统再根据数据进行装置驱动测算后,发送指令至各执行机构完成喷涂作业;
3、所述的信号采集单元包括:第一激光测距传感器、第二激光测距传感、第一测距全景摄像头、第二测距全景摄像头、第三测距全景摄像头、第四测距全景摄像头和陀螺仪组成;系统利用第一激光测距传感器与第二激光测距传感完成喷枪与船舶外板水平距离的测算,利用第一测距全景摄像头、第二测距全景摄像头、第三测距全景摄像头与第四测距全景摄像头辅助装置支架调平测算,利用陀螺仪完成装置支架与地面水平测算;
4、所述的装置驱动测算过程中,设o点为装置臂车原点,c1为装置臂车与船舶外板间水平距离,θl为臂车大臂与竖直距离夹角,a、b、c三点分别为喷涂执行机构中三个喷涂点位;臂车分别由a、b、c三点进行水平喷涂,在a点上,支架前端整体与船舶外喷枪间水平距离为m1,喷枪与外板间水平距离为l1,系统通过控制臂车与船舶外板间水平距离c1、臂车大臂与竖直距离夹角θl、支架前端与船舶外喷枪间水平距离为m1来保持机构稳定;
5、支架与船舶外板水平控制过程包括:设q’点支架原点,a1b1c1d1为支架初始位置,a2b2c2d2为支架调整位置,调整后a2、b2、c2、d2距外板水平距离分别为l1、l2、l3、l4,支架旋转机构旋至水平角度值为t,四组伺服电机驱动系数分别为f驱1、f驱2、f驱3和f驱4,旋转电机驱动系数为fz;系统分别对四组伺服电机f驱1、f驱2、f驱3和f驱4与旋转电机fz进行协同控制,当满足:l1≈l2≈l3≈l4,且误差值α∈[αmin,αmax],水平角度值t时(t=x°)时,支架与船舶外板保持水平状态;
6、所述的系统电机同步控制包括:各回路为保证电机间转速趋于同步并消除转速偏差和超调,采用耦合同步控制系统对多电机协同控制,其中各回路间第i台电机转速满足:
7、vi=kvi+1 (1)
8、式中vi为第i台电机转速,vi+1为第i+1台电机转速,k为电机转速同步系数,其中速度偏差为e;
9、在喷涂过程中,支架水平调整机构控制回路4个电机需满足系统同步要求,系统周期性采集电机转速,t0时刻,当e≠0时,此时系统电机vi与vi+1不同步,其中同步控制补偿电路采用pid控制,其中控制算法如下:
10、
11、kd=kp×td (3)
12、
13、式中,kp为比例系数,kd为微分时间常数,ki为积分时间常数;
14、其中,比例系数值越大电机加速度越大,通过修正信号微分时间常数避免转速超调;
15、其中,增量式算法如下:
16、kp[e(k)-e(k-1)]+kie(k)+kd[e(k)-2e(k-1)+e(k-2)](5)
17、系统对参数kp、kd、ki进行在线调整,利用控制直接对控制回路进行闭环控制。
18、作为优化:所述的控制中心主要包括:信号转换器、cpu、存储器与输入输出接口组成,系统采集的数据经控制器算法的调节,实现装置对环境的实时感知,以及各机构间多点协调控制,完成持续水平喷涂作业。
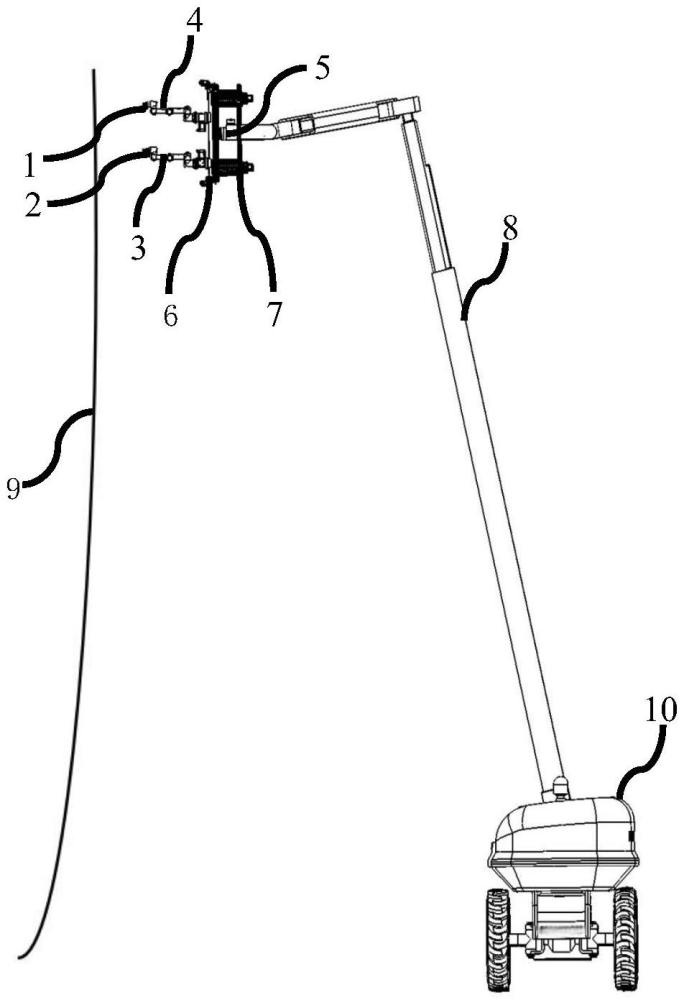
19、作为优化:所述的执行机构包括:喷涂臂车机构、喷涂支架旋转机构、支架水平调整机构、支架滑台移动机构、喷涂机械臂、喷枪以及漆雾防护机构组成,其中,喷涂臂车机构与直臂高架车一体化连接置于地面,喷涂支架旋转机构与支架水平调整机构通过旋转轴承相接悬于空中,支架滑台移动机构与支架水平调整机构相连并嵌于支架外侧,喷涂机械臂与喷枪以及漆雾防护机构连于一体通过滑块与支架滑台移动机构相接。
20、作为优化:所述的喷涂支架旋转机构包括:左侧连接直杆、陀螺仪收纳罩、陀螺仪、右侧连接直杆、旋转机构连接件以及旋转轴承组成,左、右侧连接直杆将旋转机构水平固定于支架中心,前置旋转机构连接件与旋转轴承相连嵌与支架槽内,陀螺仪收纳罩水平置于旋转机构顶部中央,收纳罩内置陀螺仪嵌于罩内。
21、作为优化:所述的支架水平调整机构包括:第一可移动支架与第二可移动支架组成,其中,支架滑台移动机构位于第一移动支架上,第一移动支架顶部四角置有4个距全景摄像头,支架底层安有两个驱动步进电机,分别位于左侧底部与右侧顶部,支架外侧连有两个水平支架通过两个竖直移动滑块与底层相接。
22、作为优化:所述的水平支架侧边装有驱动步进电机,顶部装有水平移动滑块,所述的第二可移动支架侧边装有四组支架驱动件,通过前端、后端连接件置于两支架侧边,其中,支架驱动件外置驱动伺服电机、内置螺杆,驱动滑块装于螺杆并与第一直接相连。
23、作为优化:所述的喷涂机械臂位于支架滑台移动机构上,通过水平移动滑块与支架滑台移动机构相连,所述的喷涂机械臂与喷枪以及漆雾防护机构连于一体。
24、作为优化:所述的漆雾防护机构位于喷枪底部,机构包括:漆雾防护机构底座与漆雾防护机构顶板组成,其中底座右侧装有石英材料防护罩,防护罩底部装有伺服电机,分别与底座相连,底座顶部左端装有驱动电机,顶部中端装有清洗喷头,右端装有轴承垫片,通过底端可旋转毛刷与漆雾防护机构底座相接。
25、作为优化:所述的系统控制回路原理包括:臂车控制回路、支架旋转机构控制回路、支架水平调整机构控制回路、支架滑台移动机构控制回路、机械臂控制回路以及漆雾防护机构控制回路组成;
26、系统通过臂车控制回路实现臂车与外板水平距离控制,喷涂支架旋转机构控制回路实现支架与地面平行控制,支架水平调整机构控制回路实现方形支架四边距外板水平距离等宽控制,机械臂控制回路实现喷枪与外板水平距离控制,漆雾防护机构控制回路实现防护启停控制。
27、一种船舶喷涂机器人外板喷涂调平控制系统的工作方法,所述的系统的控制流程包括如下步骤:
28、s1:系统船舶外板喷涂调平控制系统,工人按照系统预设初始位置将直臂高架车开往初始起点位;
29、s2:信号采集单元开始工作,4组测距全景摄像头随机采样,系统进行距离检测;
30、s3:高架车臂向船舶外板处开始移动,系统实时检测支架与外板距离;
31、s4:若支架与船舶外板距离满足l1∈[lmin,lmax]、l2∈[lmin,lmax]、l3∈[lmin,lmax]、l4∈[lmin,lmax],则系统控制高架车臂停止移动,同理若支架与船舶外板距离不满足上述条件,则高架车臂继续向前或向后移动;
32、s5:系统信号采集单元开启内置陀螺仪,实时采集支架位置信息,并传输至控制中心;
33、s6:控制中心接收到信号采集单元信号,对支架旋转机构内置转轴电机发出指令,驱动转轴旋至指定位置处;
34、s7:当支架旋转机构旋至水平角度值t时(t=x°),驱动电机停止旋转,此时支架水平调整机构开始工作;
35、s8:控制中心对采集信号进行数值对比分析,并测算出水平调整机构4组电机机电控制关系;
36、s9:控制中心发送指令至电机驱动器,支架驱动电机1、电机2、电机3、电机4开始运转;
37、s10:当系统采集测距值l1≈l2≈l3≈l4且误差范围α∈[αmin,αmax]时,启动支架滑台移动机构;
38、s11:滑台支架电机按系统规划路线驱动滑块移至指定位置处;
39、s12:信号采集单元中激光测距传感器开启激光测距,系统控制机械手臂协同动作;
40、s13:当系统接收到激光测距值m1∈[mmin,mmax]、m2∈[mmin,mmax]时,手臂驱动电机停止运转,此时开启漆雾防护装置;
41、s14:漆雾防护装置内置驱动电机开始运转,喷枪喷涂、此时直臂高架车开动。
42、有益效果:本发明的系统利用can总线将采集的信号实时传输至控制中心,通过多角度支架调整机构、滑台移动机构以及末端机械臂间相互配合实现装置调平,保证漆料喷嘴在竖直及水平方向上距船舶外板在一定范围内,从而达到外板漆面厚度一致,提高喷涂效率,减少人工投入的目的。
- 还没有人留言评论。精彩留言会获得点赞!