一种跳纤机械手控制方法、装置、设备及介质与流程
本技术涉及跳纤机械手领域,尤其是涉及一种跳纤机械手控制方法、装置、设备及介质。
背景技术:
1、在光通信领域,跳纤操作是连接不同设备或模块的关键步骤,对网络的稳定性和性能至关重要。跳纤操作,简单来说,就是将通信设备之间的光纤进行连接的工作。它通常涉及将两端具有相同接口(如sc、fc、st等)的光纤连接起来,以实现不同光纤间的信号传输。跳纤的施工质量直接影响到通信系统的正常运行,因此,在进行跳纤操作时,必须严格按照操作规范进行,以确保通信系统的稳定性和可靠性。
2、目前,多数跳纤操作仍依赖人工完成,人工跳纤需要逐个连接光纤,并在复杂的网络布局中仔细查找和匹配接口,这极大地消耗了人力资源。因此,如何降低跳纤操作中的人工成本成为当前亟需解决的问题。
技术实现思路
1、为了降低跳纤操作中的人工成本,本技术提供一种跳纤机械手控制方法、装置、设备及介质。
2、第一方面,本技术提供一种跳纤机械手控制方法,采用如下的技术方案:
3、一种跳纤机械手控制方法,包括:
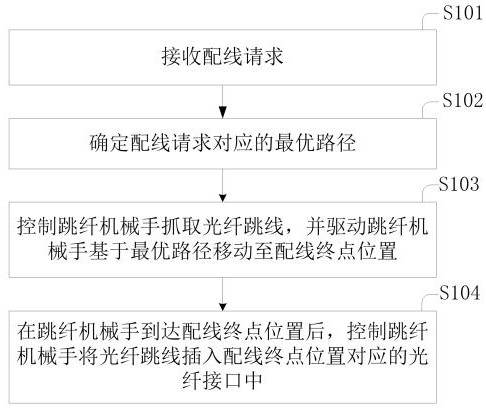
4、接收配线请求,所述配线请求包括配线起点位置以及配线终点位置;
5、确定所述配线请求对应的最优路径;
6、控制跳纤机械手抓取光纤跳线,并驱动所述跳纤机械手基于所述最优路径移动至所述配线终点位置;
7、在所述跳纤机械手到达所述配线终点位置后,控制所述跳纤机械手将所述光纤跳线插入所述配线终点位置对应的光纤接口中。
8、通过采用上述技术方案,通过自动化控制跳纤机械手,能够快速响应配线请求,自动计算最优路径,并快速、准确地完成光纤跳线的抓取、移动和插入等步骤,不仅极大地缩短了配线时间,还减轻了工作人员的劳动强度,降低跳纤操作中的人工成本,提高了整体工作效率。自动化控制还可以实现配线过程的实时监控和记录,便于后续的运维管理和故障排查。通过对配线过程的记录和分析,可以不断优化配线路径和操作方法,进一步提升运维管理水平。
9、在一种可能的实现方式中,确定所述配线请求对应的最优路径,包括:
10、构建所述配线请求对应的配线地图;
11、基于所述配线地图,确定所述配线起点位置与所述配线终点位置之间的途径位置;
12、基于所述配线起点位置、所述配线终点位置以及所述途径位置,确定所述配线请求对应的最优路径。
13、通过采用上述技术方案,通过构建配线地图,将复杂的网络环境以图形化的方式展现出来。这有助于清晰地了解配线起点、终点以及途中可能经过的各种设备、线缆布局等。基于配线地图,可以精确地识别出配线起点位置与终点位置之间的所有可能途径位置。在确定了配线起点、终点和途径位置后,通过算法对这些位置进行综合分析,选择出最优路径。
14、在一种可能的实现方式中,基于所述配线起点位置、所述配线终点位置以及所述途径位置,确定所述配线请求对应的最优路径,包括:
15、建立所述配线起点位置与相邻途径位置之间的边,并建立每两个相邻途径位置的边,并建立所述配线终点位置与相邻途径位置的边;
16、基于每个边、所述配线起点位置、所述配线终点位置以及所述途径位置,建立所述配线请求对应的第一集合;
17、确定每个边对应的权重;
18、基于每个边对应的权重,对所述第一集合进行迭代处理,并基于迭代结果建立第二集合,所述第二集合包括所述配线起点位置、所述配线终点位置以及至少一个所述途径位置;
19、基于所述第二集合,确定所述配线请求对应的最优路径。
20、通过采用上述技术方案,通过建立配线起点位置与相邻途径位置之间的边,以及每两个相邻途径位置和配线终点位置与相邻途径位置之间的边,创建了一个详细且准确的网络拓扑模型,确保了所有可能的路径都被考虑在内,从而提高了路径选择的精确性。为每个边确定对应的权重,基于每个边对应的权重,对第一集合进行迭代处理,通过算法逐步排除非最优路径,最终生成包含配线起点位置、配线终点位置以及至少一个途径位置的第二集合,能够确保找到全局最优或接近全局最优的路径。
21、在一种可能的实现方式中,确定每个边对应的权重,包括:
22、获取所述跳纤机械手的移动速度;
23、基于所述移动速度,确定每个边对应的移动时长;
24、基于每个边对应的移动时长,确定每个边对应的权重。
25、通过采用上述技术方案,在光通信网络中,时间往往是一个关键资源,通过获取跳纤机械手的实时或预设的移动速度,能够动态地评估不同路径上机械手所需的时间成本,并通过考虑移动时长来确定权重,能够优先选择那些耗时较短的路径,从而优化网络资源的配置,提高网络的整体运行效率。
26、在一种可能的实现方式中,构建所述配线请求对应的配线地图,包括:
27、获取所述跳纤机械手对应的全局图;
28、确定所述配线起点位置在所述全局图的第一位置以及所述配线终点位置在所述全局图的第二位置;
29、基于所述全局图、所述第一位置以及所述第二位置,建所述配线请求对应的配线地图。
30、通过采用上述技术方案,通过获取跳纤机械手对应的全局图,能够全面把握整个网络或工作区域的结构和布局。有助于在规划配线路径时,综合考虑各种因素,如空间限制、设备分布、光缆走向等,从而提高路径规划的精确性。在全局图中确定配线起点和终点的具体位置(即第一位置和第二位置),为后续的路径规划提供了精确的起点和终点,从而能够确保路径规划时不会偏离实际需求,提高路径的准确性和实用性。
31、在一种可能的实现方式中,控制跳纤机械手抓取光纤跳线,包括:
32、控制图像采集设备采集所述跳纤机械手的当前图像;
33、接收所述跳纤机械手上雷达传感器采集到的雷达数据;
34、基于所述当前图像、所述雷达数据以及所述全局图,构建包含所述跳纤机械手在内的虚拟场景;
35、基于所述虚拟场景以及所述配线起点位置对应的光纤跳线,模拟所述跳纤机械手对应的第一过程以及第二过程,所述第一过程为所述跳纤机械手从当前位置移动至所述配线起点位置的过程,所述第二过程为所述跳纤机械手在所述配线起点位置抓取所述光纤跳线的过程;
36、基于所述第一过程以及所述第二过程,控制跳纤机械手抓取光纤跳线。
37、通过采用上述技术方案,结合图像采集设备的当前图像和雷达传感器的雷达数据,图像数据提供了视觉上的细节,如光纤跳线的具体位置和状态,而雷达数据则提供了跳纤机械手周围环境的空间布局和动态变化,通过多源数据的融合,可以构建出更加准确、全面的虚拟场景。并基于构建的虚拟场景,能够模拟跳纤机械手从当前位置移动到配线起点位置的第一过程,以及在配线起点位置抓取光纤跳线的第二过程。不仅帮助提前发现潜在的碰撞或错误操作,还允许对操作路径和手法进行优化,从而提高实际操作的准确性和安全性。
38、在一种可能的实现方式中,驱动所述跳纤机械手基于所述最优路径移动至所述配线终点位置,包括:
39、基于所述最优路径,确定所述配线起点位置对应的起点移动方向;
40、基于所述起点移动方向以及所述起点移动方向,驱动所述跳纤机械手基于所述最优路径移动至所述配线终点位置。
41、通过采用上述技术方案,通过确定配线起点位置对应的起点移动方向,并基于该方向以及后续路径信息,跳纤机械手可以沿着最优路径精确移动。这种精确控制减少了不必要的移动和转向,从而提高了移动效率。
42、第二方面,本技术提供一种跳纤机械手控制装置,采用如下的技术方案:
43、一种跳纤机械手控制装置,包括:
44、接收模块,用于接收配线请求,所述配线请求包括配线起点位置以及配线终点位置;
45、确定模块,用于确定所述配线请求对应的最优路径;
46、驱动模块,用于控制跳纤机械手抓取光纤跳线,并驱动所述跳纤机械手基于所述最优路径移动至所述配线终点位置;
47、控制模块,用于在所述跳纤机械手到达所述配线终点位置后,控制所述跳纤机械手将所述光纤跳线插入所述配线终点位置对应的光纤接口中。
48、第三方面,本技术提供一种电子设备,采用如下的技术方案:
49、一种电子设备,该电子设备包括:
50、至少一个处理器;
51、存储器;
52、至少一个应用程序,其中至少一个应用程序被存储在存储器中并被配置为由至少一个处理器执行,所述至少一个应用程序配置用于:执行上述第一方面所述的跳纤机械手控制的方法。
53、第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:
54、一种计算机可读存储介质,包括:存储有能够被处理器加载并执行上述第一方面所述的跳纤机械手控制方法的计算机程序。
55、综上所述,本技术包括以下有益技术效果:
56、通过自动化控制跳纤机械手,能够快速响应配线请求,自动计算最优路径,并快速、准确地完成光纤跳线的抓取、移动和插入等步骤,不仅极大地缩短了配线时间,还减轻了工作人员的劳动强度,降低跳纤操作中的人工成本,提高了整体工作效率。自动化控制还可以实现配线过程的实时监控和记录,便于后续的运维管理和故障排查。通过对配线过程的记录和分析,可以不断优化配线路径和操作方法,进一步提升运维管理水平。
- 还没有人留言评论。精彩留言会获得点赞!