机器人乘梯的错层恢复方法、装置、机器人及存储介质与流程
本技术涉及机器人,尤其是涉及一种机器人乘梯的错层恢复方法、装置、机器人及存储介质。
背景技术:
1、随着人工智能、自动控制、传感技术的迅速发展,机器人技术在过去几十年中取得了显著的进步,特别是在服务机器人领域。服务机器人能够在人类生活和工作环境中完成各种辅助任务,为社会带来了前所未有的便利和效率提升。如今,机器人已经广泛应用于家庭、酒店、医院、商业楼宇等场景,承担了包括清洁、递送、安防、陪护等多种任务。随着自动化水平的提高,在现代智能建筑、酒店、医院等多层结构中,服务机器人逐渐承担起跨楼层任务,为用户提供物品递送、导引、安防监控、清洁等多种服务。
2、然而,跨层任务的实现面临诸多挑战,例如:在机器人乘梯时,由于电梯空间有限,有时候会被人为挪出电梯,此时机器人和工作人员无法具体感知,当移出楼层非目标楼层时,定位无法恢复,导致卡死在被移出楼层,无法正常完成任务。因此,如何在机器人执行跨楼层任务时,及时确定机器人的错层行为以及对错层行为进行正确恢复,从而保证任务正常进行,是机器人执行跨楼层任务时亟待解决的。
3、为此,现有技术(cn115235469a)公开了一种机器人在电梯场景下的定位方法、装置、设备及介质,该方案通过预设滑动窗口对每个电梯在不同时刻的运行速度进行计算,得到各电梯的运行区间,并按照时间先后顺序依次将电梯的运行区间与机器人imu事件进行匹配;当电梯组群中存在与待进入电梯标识一致的电梯,则表示机器人定位准确,进入了待进入电梯标识对应的电梯;当电梯组群中不存在与待进入电梯标识一致的电梯,则表示机器人定位不准确,需对机器人进行重新定位,以确保机器人在不能识别周围环境或gps定位错误的情况下,可以准确地进入需要进入的电梯。
4、根据上述内容可知,cn115235469a是采集所有电梯运行区间与机器人imu事件匹配,确定机器人是否进入目标电梯,从而避免因进错电梯的情况。但是在进入正确电梯的情况下也会存在错误出梯的错层情况,因此通过cn115235469a的方案,并不能解决机器人错误出梯问题的发生,并且也未提供错层后如何恢复的具体技术手段。
5、此外,现有技术(cn114180430b)公开了一种机器人执行任务的方法及装置,该方案在机器人上设置有惯性测量传感器(imu),可以基于该惯性测量传感器检测机器人在水平或者竖直方向上的加速度,若在竖直方向上有加速度,确定机器人被抬起而搬出电梯;若在水平方向上有加速度,确定机器人被推出电梯。然后通过视觉传感器采集电梯的序号、和/或周围的环境标识(每层楼的标识)、和/或wifi信息中的楼层信息、和/或周围人员的语音交互信息确定机器人当前所在楼层,并根据该所在楼层确定机器人的位置信息。
6、但是,在机器人乘梯,电梯升降过程中惯性测量传感器(imu)也会检测出加速度,从而导致出梯状态误识别。并且在电梯未标有序号、周围未添加楼层标识、无具有楼层信息的wifi信息以及周围无人员的情况下,该技术方案(cn114180430b)是无法确定机器人当前所在楼层的,从而无法执行目标任务。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种机器人乘梯的错层恢复方法、装置、机器人及存储介质,可及时准确的确定机器人的错层行为,并在错层时对机器人的位置进行及时恢复,从而可有效保证机器人任务的正常执行。
2、本技术实施例提供了一种机器人乘梯的错层恢复方法,所述错层恢复方法包括:
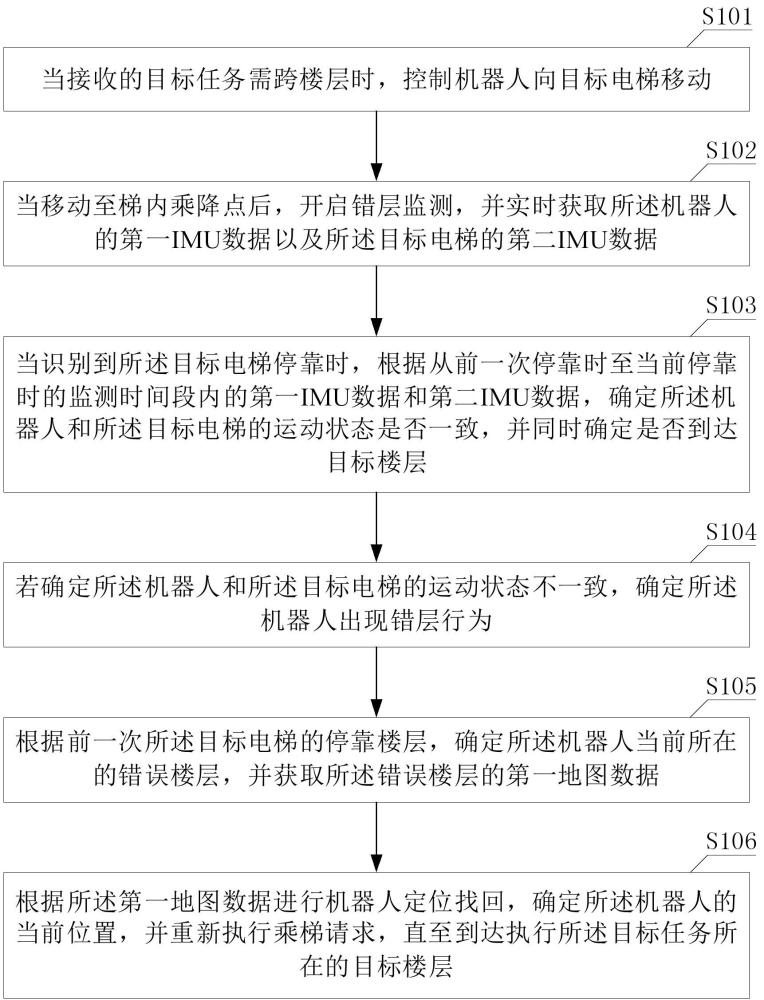
3、当接收的目标任务需跨楼层时,控制机器人向目标电梯移动;
4、当移动至梯内乘降点后,开启错层监测,并实时获取所述机器人的第一imu数据以及所述目标电梯的第二imu数据;
5、当识别到所述目标电梯停靠时,根据从前一次停靠时至当前停靠时的监测时间段内的第一imu数据和第二imu数据,确定所述机器人和所述目标电梯的运动状态是否一致,并同时确定是否到达目标楼层;
6、若确定所述机器人和所述目标电梯的运动状态不一致,确定所述机器人出现错层行为;
7、根据前一次所述目标电梯的停靠楼层,确定所述机器人当前所在的错误楼层,并获取所述错误楼层的第一地图数据;
8、根据所述第一地图数据进行机器人定位找回,确定所述机器人的当前位置,并重新执行乘梯请求,直至到达执行所述目标任务所在的目标楼层;
9、其中,所述根据所述第一地图数据进行机器人定位找回,确定所述机器人的当前位置,包括:
10、从所述第一地图数据中截取所述错误楼层中所述目标电梯所在预定区域内的局部地图;
11、使用所述机器人所采集的环境数据与所述局部地图进行匹配,确定局部定位搜索是否成功;
12、若局部定位搜索成功,确定所述机器人的当前位置。
13、可选的,所述当接收的目标任务需到跨楼层时,控制机器人向目标电梯移动,包括:
14、当接收目标任务后,确定执行所述目标任务所在的目标楼层与所述机器人当前所在楼层是否一致;
15、若不一致,确定执行所述目标任务需乘坐的目标电梯,并控制所述机器人向所述目标电梯的梯外等候点移动;
16、到达所述目标电梯的梯外等候点后,监测所述目标电梯是否到达;
17、当监测到所述目标电梯到达后,控制所述机器人移动至梯内乘降点;
18、当所述机器人移动至所述目标电梯的梯内乘降点后,所述机器人中的地图数据切换为所述目标楼层的第二地图数据;
19、其中,通过以下步骤确定执行所述目标任务需乘坐的目标电梯:
20、根据所有电梯的调度数据,按预设选择策略从至少一个电梯中确定出目标电梯;
21、或,根据所述机器人的当前位置和所在楼层的地图数据,将距离所述机器人最近的电梯确定为目标电梯。
22、可选的,所述根据从前一次停靠时至当前停靠时的监测时间段内的第一imu数据和第二imu数据,确定所述机器人和所述目标电梯的运动状态是否一致,包括:
23、分别对该监测时间段内的第一imu数据和第二imu数据进行惯性数据趋势分析处理,得到所述机器人和所述目标电梯的至少一项惯性趋势参考参数;
24、当两者的惯性趋势参考参数符合一致性判定要求时,确定所述机器人和所述目标电梯的运动状态一致;否则,确定所述机器人和所述目标电梯的运动状态不一致;
25、其中,所述惯性趋势参考参数包括以下至少一项:加速度曲线拟合结果、数据连续性、加速度单调性、以及速度单调性。
26、可选的,所述根据所述第一地图数据进行机器人定位找回,确定机器人的当前位置,还包括:
27、若局部定位搜索失败,进行全局定位搜索;
28、若全局定位搜索成功,确定所述机器人的当前位置;若全局定位搜索失败,向目标人员发送求助指令,以找回所述机器人的当前位置。
29、可选的,所述错层恢复方法还包括:
30、当确定所述机器人和所述目标电梯的运动状态一致,但未达到目标楼层时:
31、继续执行错层监测,并实时获取所述机器人的第一imu数据以及所述目标电梯的第二imu数据;
32、当确定所述机器人和所述目标电梯的运动状态一致,且达到目标楼层时:
33、控制所述机器人向电梯外移动;
34、当移动至所述目标楼层中的出梯点后,关闭错层监测,并开始执行目标任务。
35、可选的,所述错层恢复方法还包括:
36、若所述机器人在预定时间内未移动至目标楼层中的出梯点时,执行控制电梯开门操作,并继续控制所述机器人向电梯外移动;
37、若在所述目标电梯开门期间,还未移动至所述目标楼层中的出梯点,则重新执行乘梯请求,并继续执行错层监测。
38、可选的,所述确定执行所述目标任务需乘坐的目标电梯,并控制所述机器人向所述目标电梯的梯外等候点移动,包括:
39、获取所述目标电梯的梯外等候点;
40、根据所述机器人的当前位置和所述目标电梯的梯外等候点,并结合所述机器人当前所在楼层的地图数据进行路径规划处理,确定所述机器人从当前位置移动至梯外等候点的移动路径;
41、按所述移动路径控制所述机器人移动,直至移动到所述目标电梯的梯外等候点;
42、所述在监测所述目标电梯是否到达前,所述错层恢复方法还包括:
43、向所述目标电梯的控制系统发送携带有目标楼层信息的第一乘梯请求;其中,所述第一乘梯请求的发送方式为以下任一种:
44、通过无线通信向所述目标电梯对应的电梯控制系统发送第一乘梯请求;
45、通过所述机器人与所述目标电梯所建立的物联网平台,向所述目标电梯对应的电梯控制系统发送第一乘梯请求;
46、当所述机器人到达所述目标电梯的梯外等候点后,通过短距离通信方式向所述目标电梯对应的电梯控制系统发送第一乘梯请求;
47、当所述机器人到达所述目标电梯的梯外等候点后,控制所述机器人对所述目标电梯外的呼梯键进行操作,以向所述目标电梯对应的电梯控制系统发送第二乘梯请求;其中,第二乘梯请求中不携带目标楼层信息;
48、所述控制所述机器人对所述目标电梯外的呼梯键进行操作之后,所述错层恢复方法还包括:
49、当确定所述机器人移动至梯内乘降点后,控制所述机器人对所述目标电梯内的楼层选择键进行操作,以向所述目标电梯对应的电梯控制系统发送所需达到的目标楼层信息。
50、本技术实施例还提供了一种机器人乘梯的错层恢复装置,所述错层恢复装置包括:
51、控制模块,用于当接收的目标任务需跨楼层时,控制机器人向目标电梯移动;
52、第一监测模块,用于当移动至梯内乘降点后,开启错层监测,并实时获取所述机器人的第一imu数据以及所述目标电梯的第二imu数据;
53、第一确定模块,用于当识别到所述目标电梯停靠时,根据从前一次停靠时至当前停靠时的监测时间段内的第一imu数据和第二imu数据,确定所述机器人和所述目标电梯的运动状态是否一致,并同时确定是否到达目标楼层;
54、第二确定模块,用于若确定所述机器人和所述目标电梯的运动状态不一致,确定所述机器人出现错层行为;
55、第三确定模块,用于根据前一次所述目标电梯的停靠楼层,确定所述机器人当前所在的错误楼层,并获取所述错误楼层的第一地图数据;
56、恢复模块,用于根据所述第一地图数据进行机器人定位找回,确定所述机器人的当前位置,并重新执行乘梯请求,直至到达执行所述目标任务所在的目标楼层;
57、其中,所述恢复模块在用于根据所述第一地图数据进行机器人定位找回,确定所述机器人的当前位置时,所述恢复模块用于:
58、从所述第一地图数据中截取所述错误楼层中所述目标电梯所在预定区域内的局部地图;
59、使用所述机器人所采集的环境数据与所述局部地图进行匹配,确定局部定位搜索是否成功;
60、若局部定位搜索成功,确定所述机器人的当前位置。
61、本技术实施例还提供一种机器人,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当机器人运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如上述的错层恢复方法的步骤。
62、本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的错层恢复方法的步骤。
63、本技术实施例提供的一种机器人乘梯的错层恢复方法、装置、机器人及存储介质,所述错层恢复方法包括:当接收的目标任务需跨楼层时,控制机器人向目标电梯移动;当移动至梯内乘降点后,开启错层监测,并实时获取所述机器人的第一imu数据以及所述目标电梯的第二imu数据;当识别到所述目标电梯停靠时,根据从前一次停靠时至当前停靠时的监测时间段内的第一imu数据和第二imu数据,确定所述机器人和所述目标电梯的运动状态是否一致,并同时确定是否到达目标楼层;若确定所述机器人和所述目标电梯的运动状态不一致,确定所述机器人出现错层行为;根据前一次所述目标电梯的停靠楼层,确定所述机器人当前所在的错误楼层,并获取所述错误楼层的第一地图数据;根据所述第一地图数据进行机器人定位找回,确定所述机器人的当前位置,并重新执行乘梯请求,直至到达执行所述目标任务所在的目标楼层。
64、这样,本方案在机器人执行跨楼层任务时,当机器人进入目标电梯后,开启乘梯过程的错层监测,能够避免非乘梯过程监测相关数据占用处理资源,实时获取机器人的第一imu数据和目标电梯的第二imu数据,并在每次电梯停靠时,基于监测时间段内(前一次停靠时至当前停靠时的时段内)的imu数据判断机器人和电梯的运动状态是否一致,从而能对机器人乘梯过程中发生的错层行为及时确定;并且,本方案中确定机器人发生错层行为后,根据前一次目标电梯的停靠楼层,快速确定所述机器人当前所在的错误楼层,从而根据错误楼层的地图数据进行局部定位搜索,可在减少计算量的基础上,快速准确的确定机器人的当前位置(所在错误楼层中的位置);确定完错层行为以及进行自主定位恢复后,机器人重新执行乘梯请求,确保最终到达目标楼层中执行目标任务。
65、综上所述,本方案确保机器人即使在发生错层的情况下,也能自动恢复和调整,提升了机器人在多楼层环境中的任务执行效率和稳定性,从而确保机器人在多层建筑环境中高效准确地完成任务。
66、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!