气动软体致动器、气动软体致动器的控制方法、装置及电子设备
本发明涉及机械外骨骼,具体而言,涉及一种气动软体致动器、气动软体致动器的控制方法、装置及电子设备。
背景技术:
1、可穿戴机器人外骨骼正在彻底改变人类的能力,其应用范围从增强体力和耐力到协助康复和改善日常活动。这些设备通过减少身体疲劳、提高负重能力以及帮助身体残疾个体恢复活动能力和进行独立性生活方面特别有效。
2、可穿戴机器人外骨骼因其轻盈、低成本和简单驱动等优点,被大量应用于康复外骨骼机械手中,以辅助手功能障碍患者的康复训练和日常生活。然而,目前的可穿戴机器人外骨骼的灵活性、舒适性和轻便性均较差。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种气动软体致动器、气动软体致动器的控制方法、装置及电子设备,该气动软体致动器具有更小的体积,极大了提升了灵活性、舒适性和轻便性,同时高精度地实现自动控制。
2、为了实现上述目的,本发明采用的技术方案如下:
3、第一方面,本发明提供一种气动软体致动器,包括气动模块、气泵模块、控制设备和检测模块;
4、所述气动模块包括柔性支撑板和设置于所述柔性支撑板上的多个气囊,所述气囊的一端设置于所述柔性支撑板上,且每两个相邻的所述气囊的设置位置之间的间距均等于预设值,每个所述气囊上均设置有气孔;
5、所述气泵模块与所述气孔连通,所述检测模块设置于所述气动模块上,所述控制设备分别与所述检测模块和所述气泵模块通信连接;
6、所述检测模块用于实时对所述气动模块的致动情况进行监测,得到当前的测量致动量,并将所述测量致动量上报至所述控制设备;其中,所述测量致动量包括角度和扭矩;
7、所述控制设备用于根据目标致动量和当前的所述测量致动量,调节所述气泵模块的气体注入量,以调节所述气动模块的致动量。
8、可选地,所述控制设备用于根据目标致动量和当前的所述测量致动量,调节所述气泵模块的气体注入量的步骤,包括:
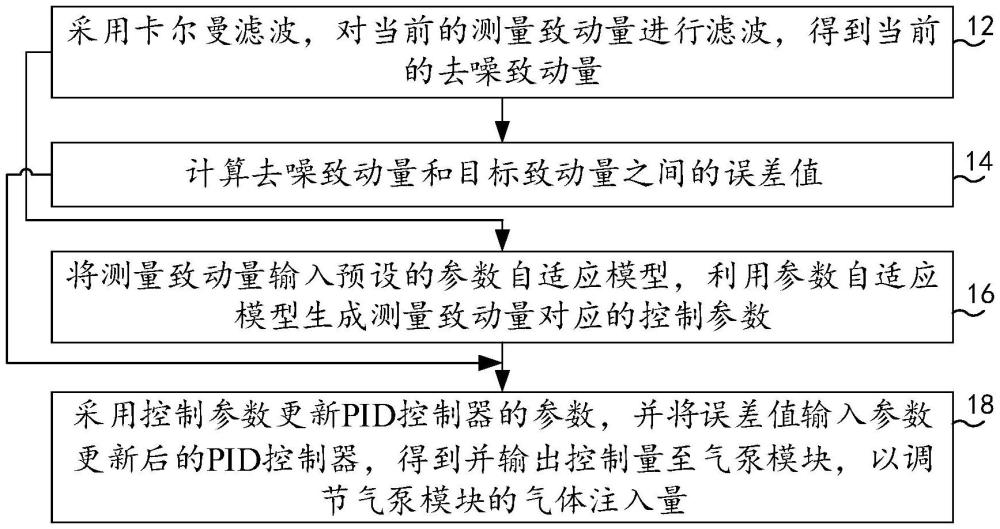
9、采用卡尔曼滤波,对当前的所述测量致动量进行滤波,得到当前的去噪致动量;
10、计算所述去噪致动量和目标致动量之间的误差值;
11、将所述测量致动量输入预设的参数自适应模型,利用所述参数自适应模型生成所述测量致动量对应的控制参数;
12、采用所述控制参数更新pid控制器的参数,并将所述误差值输入参数更新后的pid控制器,得到并输出控制量至所述气泵模块,以调节所述气泵模块的气体注入量。
13、可选地,所述气泵模块包括气泵、气管和控制阀,所述气泵通过所述气管与所述气囊的气孔连通,所述控制阀设置于所述气管上,所述控制设备分别与所述气泵和所述控制阀通信连接。
14、可选地,所述采用卡尔曼滤波,对当前的所述测量致动量进行滤波,得到当前的去噪致动量的步骤,包括:
15、获取状态方程在上一时刻对当前时刻的状态估计数据;其中,所述状态估计数据包括致动估计量和误差协方差;
16、使用观测方程,结合当前时刻所述致动估计量和所述误差协方差,对所述测量致动量进行滤波去噪,得到当前时刻的去噪致动量;
17、使用所述状态方程,根据当前时刻的去噪致动量对下一时刻的去噪致动量进行估计,得到下一时刻的状态估计数据。
18、可选地,所述参数自适应模型的获取步骤包括:
19、获取所述气动软体致动器的多组实验数据;其中,每组所述实验数据包括状态量,以及所述气动模块处于所述状态量时所述pid控制器的最优控制参数,所述状态量包括角度和扭矩;
20、以所述实验数据中的状态量为输入,以所述实验数据中的最优控制参数为输出,拟合得到参数自适应模型。
21、可选地,所述以所述实验数据中的状态量为输入,以所述实验数据中的最优控制参数为输出,拟合得到参数自适应模型的步骤,包括:
22、采用多种模型拟合方法,以所述实验数据中的状态量为输入,以所述实验数据中的最优控制参数为输出,拟合得到多个初始模型;
23、根据所述实验数据,对所述初始模型进行评估,得到每个初始模型的性能值;其中,所述性能值包括准确度;
24、将所述性能值最优的所述初始模型,作为参数自适应模型。
25、可选地,在所述采用卡尔曼滤波,对当前的所述测量致动量进行滤波,得到当前的去噪致动量的步骤之前,还包括:
26、基于当前时刻之前的至少一个测量致动量,判断当前的所述测量致动量是否异常;
27、若否,则执行所述采用卡尔曼滤波,对当前的所述测量致动量进行滤波,得到当前的去噪致动量的步骤;
28、若是,则发出报警。
29、第二方面,本发明提供一种气动软体致动器的控制方法,应用于如第一方面所述的气动软体致动器中,所述控制方法包括:
30、对所述气动软体致动器的检测模块进行采样,以获取所述气动软体致动器的气动模块当前的测量致动量;其中,所述测量致动量包括角度和扭矩;
31、根据目标致动量和当前的所述测量致动量,调节所述气动软体致动器中气泵模块的气体注入量,以调节所述气动模块的致动量。
32、可选地,所述根据目标致动量和当前的所述测量致动量,调节所述气动软体致动器中气泵模块的气体注入量的步骤,包括:
33、采用卡尔曼滤波,对当前的所述测量致动量进行滤波,得到当前的去噪致动量;
34、计算所述去噪致动量和目标致动量之间的误差值;
35、将所述测量致动量输入预设的参数自适应模型,利用所述参数自适应模型生成所述测量致动量对应的控制参数;
36、采用所述控制参数更新pid控制器的参数,并将所述误差值输入参数更新后的pid控制器,得到并输出控制量至所述气泵模块,以调节所述气泵模块的气体注入量。
37、第三方面,本发明提供一种气动软体致动器的控制装置,应用于如第一方面所述的气动软体致动器中,所述控制装置包括检测采样模块和控制模块;
38、所述检测采样模块,用于对所述气动软体致动器的检测模块进行采样,以获取所述气动软体致动器的气动模块当前的测量致动量;其中,所述测量致动量包括角度和扭矩;
39、所述控制模块,用于根据目标致动量和当前的所述测量致动量,调节所述气动软体致动器中气泵模块的气体注入量,以调节所述气动模块的致动量。
40、第四方面,本发明提供一种电子设备,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机程序,所述处理器可执行所述计算机程序以实现如第二方面所述的气动软体致动器的控制方法。
41、第五方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第二方面所述的气动软体致动器的控制方法。
42、本发明实施例提供的气动软体致动器、气动软体致动器的控制方法、装置及电子设备,至少具有以下有益效果:
43、(1)通过将多个气囊等间距设置于柔性支撑板上来形成气动模块,使得气动模块在充气状态下能够产生高扭矩来致动,而在放气后体积又能大幅缩小仅占用很小的空间,从而极大地缩小了气动软体致动器的体积,提升了轻便性;
44、(2)控制设备采用反馈调节的方式,根据气动模块实时的测量致动量调节气泵模块的气体注入量,以实现对气动模块的角度和/或扭矩高精度调节,同时能实现任意角度或扭矩的调整,极大地提升了气动模块的灵活性;
45、(3)充气后的气囊压强低且具有柔性,从而最大限度地减低了佩戴者的不适,提升了舒适性。
46、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!