一种基于四足机器人的变电站巡检方法及系统与流程
本发明涉及变电站巡检,特别是一种基于四足机器人的变电站巡检方法及系统。
背景技术:
1、随着现代化电力系统规模的不断扩大,变电站设备的运行维护复杂度逐渐增加,传统的人工巡检方法由于其高成本、低效率以及安全隐患等缺点,已逐渐不能满足智能化电网的需求,近年来,基于机器人技术的变电站巡检方案逐渐兴起,传统的移动机器人、无人机等方式已初步应用于电力巡检,但多足机器人,尤其是四足机器人,因其结构特点更适应复杂地形及环境,且具有较强的机动性和负载能力,因此越来越受到关注。
2、在巡检功能上,现有技术中的巡检机器人通常配备图像采集设备、红外温度检测仪等传感器,基本能够完成静态变电站设备的温度监测和部分表面状态识别,但缺乏对声学分析的功能,无法及时发现变电站设备内部的声波异常或局部噪声的异常波动,导致设备的早期故障难以及时检测,降低了巡检效率。
技术实现思路
1、鉴于上述现有的基于四足机器人的变电站巡检方法及系统中存在的问题,提出了本发明。
2、因此,本发明所要解决的问题在于现有技术中的巡检机器人通常配备图像采集设备、红外温度检测仪等传感器,基本能够完成静态变电站设备的温度监测和部分表面状态识别,但缺乏对声学分析的功能,无法及时发现变电站设备内部的声波异常或局部噪声的异常波动,导致设备的早期故障难以及时检测,降低了巡检效率。
3、为解决上述技术问题,本发明提供如下技术方案:一种基于四足机器人的变电站巡检方法,其包括,
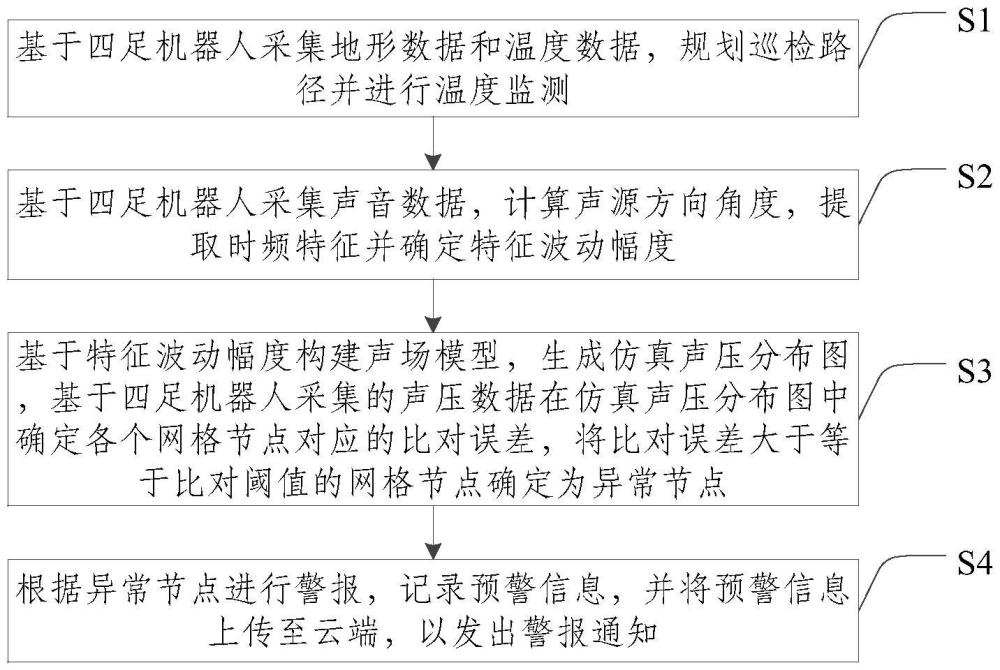
4、基于四足机器人采集地形数据和温度数据,规划巡检路径并进行温度监测;
5、基于四足机器人采集声音数据,计算声源方向角度,提取时频特征并确定特征波动幅度;
6、基于特征波动幅度构建声场模型,生成仿真声压分布图,基于四足机器人采集的声压数据在仿真声压分布图中确定各个网格节点对应的比对误差,将比对误差大于等于比对阈值的网格节点确定为异常节点;
7、根据异常节点进行警报,记录预警信息,并将预警信息上传至云端,以发出警报通知。
8、作为本发明所述基于四足机器人的变电站巡检方法的一种优选方案,其中:所述基于四足机器人采集地形数据和温度数据,包括,
9、基于四足机器人装备的高精度激光雷达,采集变电站所有巡检路径的地形数据,形成实时点云数据构建三维地形模型;
10、基于四足机器人装备的红外热成像摄像头,采集变电站设备表面的温度数据。
11、作为本发明所述基于四足机器人的变电站巡检方法的一种优选方案,其中:所述规划巡检路径并进行温度监测,包括,
12、基于三维地形模型,计算四足机器人距离障碍物的欧氏距离,采用a*算法计算从起点到终点的最短路径,将最短路径作为变电站的巡检路径并生成巡检路径对应的移动指令,机器人控制系统依据移动指令执行巡检路径的移动操作;
13、基于设备表面的温度数据,在四足机器人按照变电站的巡检路径进行移动时,根据安全规范的温度阈值进行变电站设备的温度监测。
14、作为本发明所述基于四足机器人的变电站巡检方法的一种优选方案,其中:所述基于四足机器人采集声音数据,计算声源方向角度,提取时频特征并识别特征波动幅度,包括,
15、基于四足机器人两侧安装的声音传感器,进行双通道的音频采样;
16、利用互相关算法计算左右声道之间的时间延迟差δt,表示为:
17、
18、其中,z表示总采样数,rxy(τ)表示在时间延迟τ下左、右声道信号的相似性,x[n]表示左声道信号在时间点n的采样值,y[n-τ]右声道信号在时间点n-τ的采样值;
19、取rxy(τ)最大时的τ值为左右声道之间的实际时间延迟差δt;
20、基于实际时间延迟差δt,确定声源方向角度,表示为:
21、
22、其中,θ表示声源方向角度,arc表示arcsin反正弦函数,c表示声速,d表示两个声音传感器的间距;
23、使用离散小波变换dwt分解每个声道信号,二级小波分解将信号分为低频和多层次的高频分量;
24、将低频分量作为环境噪声,并基于高频分量进行时频特征提取,表示为:
25、
26、其中,表示第i个分量在时间t时刻的短时能量,ω表示采集窗口大小,di(n)表示第i个高频分量在时间点n的信号值;
27、基于rnn神经网络构建深度学习模型,包括输入层、隐藏层和输出层,其中输入层输入短时能量数据和对应的声源方向角度,隐藏层使用tanh作为激活函数,保持时间序列中的短期记忆能力,输出层输出特征波动幅度;
28、使用训练集训练模型,选择交叉熵损失函数计算模型输出与实际标签之间的差异,使用adam优化器进行梯度下降优化,更新模型的参数,在连续迭代过程中模型的损失下降符合预设要求时停止迭代输出模型参数;
29、将不同时间的声学短时能量和对应的声源方向角度输入深度学习模型,并输出特征波动幅度值,将基于历史数据计算的均值和标准差的相加和相减的值作为范围阈值,若特征波动幅度值超过范围阈值,则判断为存在异常波动,且基于声源方向角度确定声源方向。
30、作为本发明所述基于四足机器人的变电站巡检方法的一种优选方案,其中:所述基于特征波动幅度构建声场模型,生成仿真声压分布图,包括,
31、构建初步的声场模型,并对初步的声场模型进行网格划分,将每个网格定义为网格节点,网格共有m×n个网格节点,并确定相邻节点对的距离;
32、根据在特征波动幅度中实际检测到的异常声音波动频率,设定该频率为激励频率,基于故障设备的实际声压计算对应的声压级,并将该声压级设置为激励声压级;
33、基于每个网格节点使用有限差分法离散化亥姆霍兹方程,表示为:
34、
35、其中,p0表示空气密度,pi,j表示网格节点(i,j)的声压值,pi+1,j和pi-1,j分别表示左右相邻节点的声压,pi,j+1和pi,j-1分别表示上下相邻节点的声压,h表示网格间距,表示声源的角频率,c表示声速;
36、基于离散化亥姆霍兹方程确定中心节点pi,j的系数为以及相邻节点的系数均为
37、构建系数矩阵a,矩阵的每一行和每一列对应一个网格节点(i,j)的离散方程;
38、基于系数矩阵a的主对角线位置,填入中心节点pi,j的系数并根据系数矩阵a主对角线位置的相邻节点,填入相邻节点的系数
39、基于网格节点分别构建边界条件列向量b和声压列向量p,基于变电站设备在网格节点的分布,在边界条件向量b中对应网格节点填入激励声压级对应的声压值;
40、基于系数矩阵a声压列向量p和边界条件向量b构建矩阵方程,表示为:
41、a·p=b;
42、使用共轭梯度法的迭代计算矩阵方程求解p,基于历史数据确定收敛阈值并在满足收敛条件时停止迭代,得到声压列向量p,并明确每个网格节点的声压值,根据每个网络节点的声压值计算对应的声压级;
43、基于网格节点的声压级,通过matlab工具生成仿真声压分布图。
44、作为本发明所述基于四足机器人的变电站巡检方法的一种优选方案,其中:所述基于四足机器人采集的声压数据在仿真声压分布图中确定各个节点对应的比对误差,将比对误差大于等于比对阈值的节点确定为异常节点,包括,
45、在四足机器人按照变电站的巡检路径进行移动时,基于四足机器人装备的声压传感器,采集周围环境的声压数据,并计算对应的声压级数据;
46、根据四足机器人的巡检路径将计算的声压级数据标记在网格节点,并与仿真声压分布图中对应网格节点的声压级数据进行比对;
47、收集在正常状态下的声压级数据,计算平均值及标准差,将均值与二倍标准差的和作为比对阈值,若计算的声压级数据与仿真声压分布图中对应网格节点的声压级数据的比对误差大于等于比对阈值,则判断为声压级数据异常,并标记对应网格节点为异常节点。
48、作为本发明所述基于四足机器人的变电站巡检方法的一种优选方案,其中:所述根据异常节点进行警报,记录预警信息,并将预警信息上传至云端,以发出警报通知,包括,
49、基于异常节点,四足机器人触发声光警报,并记录预警信息;
50、使用tls加密协议对预警信息进行加密,并通过5g网络将加密后的预警信息上传至云端数据存储,同时发送至巡检人员终端,进行警报通知。
51、异常节点本发明的另外一个目的是提供一种基于四足机器人的变电站巡检方法的系统,其包括,
52、数据采集模块,采集四足机器人设备周围数据;
53、特征分析模块,根据双通道声音数据,利用声源定位算法计算声源方向角度,提取声音信号的时频特征,识别特征波动幅度;
54、声场仿真模块,基于亥姆霍兹方程和离散化方法,构建设备周围的声场模型,生成仿真声压分布图;
55、警报通信模块,将警报信息上传至云端,根据异常程度实时触发警报,提醒现场或远程监控人员。
56、一种计算机设备,包括:存储器和处理器;所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述基于四足机器人的变电站巡检方法的步骤。
57、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述基于四足机器人的变电站巡检方法的步骤。
58、本发明有益效果为:通过结合声音数据分析和声场模型,实现了对变电站设备的多维度监测,不仅包括温度监测和表面状态识别,还包括声学分析,弥补了现有巡检机器人的不足,以使得能够及时发现设备内部的声波异常或局部噪声的异常波动,提高了巡检的实时性和响应速度,即提升了巡检效率。通过互相关算法计算双通道音频的时间延迟差并确定声源方向角度,可以准确定位声源的方向,通过离散小波变换将音频信号分解为低频和多层次高频分量,并对高频分量提取时频特征,使系统能够从复杂的声音环境中识别出异常声源,提升了异常声的识别准确性,通过rnn深度学习模型,能够学习历史数据中的声音特征模式,并基于输入的短时能量数据和声源方向角度预测特征波动幅度,以此达到基于声音的快速传递,让机器人快速对周围较大环境进行监测,提高了巡检效率,同时基于声场模型,通过仿真生成的声压分布图能够精确地展示变电站中不同位置的声压情况,从而实现对异常声源的准确定位,有效支持设备维护和状态管理的决策。
- 还没有人留言评论。精彩留言会获得点赞!