一种机器人的切割控制方法及系统与流程
本发明涉及输电塔切割倒塔,具体涉及一种机器人的切割控制方法及系统。
背景技术:
1、输电塔在电力传输网络中发挥着至关重要的作用,随着时间的推移,这些塔的结构可能会因老化、损坏、技术升级或更换线路等原因需要拆除。传统的输电塔通常使用钢材和混凝土建造,随着使用年限的增加,塔体会逐渐出现腐蚀、疲劳、损坏等问题,可能影响其稳定性和安全性。为了保持电力传输系统的安全与稳定,需要定期对这些老旧的输电塔进行评估和拆除。
2、倒塔工作不仅仅是拆除一个物理结构,更涉及到复杂的操作和精确的工程技术。输电塔通常包括多个铁搭支腿,每个铁塔支腿包括两个主塔材和一个辅塔材,两个主塔材分别位于辅塔材的两侧。传统的倒塔方式主要依赖人工切割和简单机械设备,在进行塔体拆除时,首先需要进行精准的切割和拆卸工作,确保塔体能够按照预定的方向倒塌,避免对周围环境、设施和人员造成损害。尤其是在电力塔所处的环境通常较为复杂,如高山、丛林、城市等,这些环境不仅使得人工拆除作业困难重重,而且也使得传统机械设备在操作时面临诸多挑战,尤其是在狭小空间或高空作业时,作业的安全性和效率都存在较大风险。
3、随着输电塔维护和替换工作日益增多,传统的人工和机械拆除方式已经无法满足高效、安全和低风险的需求。
技术实现思路
1、本发明提供了一种机器人的切割控制方法,目的在于能够提高切割拆除塔材的作业效率。
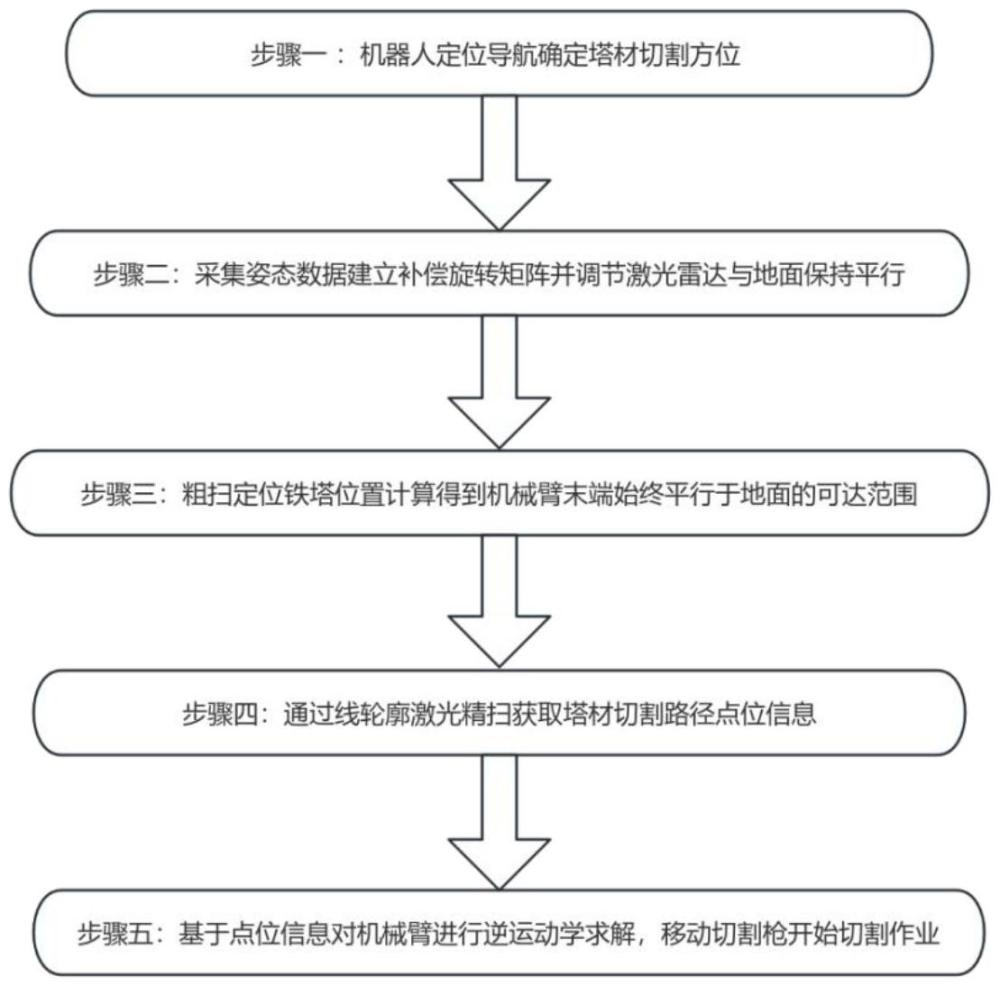
2、本发明通过下述技术方案实现:一种机器人的切割控制方法,包括以下步骤:
3、步骤一,根据机器人定位导航确定铁塔支腿切割路径;
4、步骤二,采集姿态数据建立补偿旋转矩阵,并调节机械臂末端的雷达与地面保持平行;
5、步骤三,粗扫定位铁塔支腿位置计算得到机械臂末端始终平行于地面的可达范围;
6、步骤四,通过线轮廓扫描仪精扫获取铁塔支腿上切割路径点位信息;
7、步骤五,基于点位信息对机械臂进行逆运动学求解,移动切割枪开始切割作业。
8、本发明中提供的一种机器人的切割控制方法可采用自动控制系统进行控制,实现机器人自动切割拆除塔材的目的,能够有效的提高切割拆除作业的效率。
9、本发明中通过定位导航确定切割方位后,能够通过确定机器人的切割路径,而本方案中还通过姿态数据建立补偿旋转矩阵,这样便于计算出机械臂各个关节的补偿角度,从而便于对机械臂进行调整,使机械臂末端的雷达底座与地面平行,方便对机械臂进行姿态调节,减少算法的复杂程度。
10、另外,本方案中能够确定机械臂末端保持平行与地面的状态时,机械臂末端的可达范围,从而便于精准调节控制机械臂的切割位置;而线轮廓扫描仪能够精准的确定机械臂与铁塔支腿之间的距离,适时调整切割枪的切割姿态。
11、本方案中提供的一种机器人的切割控制方法能够实现机器人对铁塔支腿进行精准切割的目的,且能够在切割的过程中能够自动调节机械臂的切割姿态,从而适应铁塔的轮廓形状,完成快速切割,且本方案能够适用于处于环境复杂的铁塔切割拆除使用,根据本方案的这种控制方法能够精确且顺利的完成切割拆除,能够大大提高切割拆除效率。
12、进一步,所述根据机器人定位导航确定铁塔支腿切割路径,具体为:
13、根据输电塔的铁塔支腿确定机器人的a、b、c三个扫描点,其中a点位置和c点位置分别为铁塔支腿的两个主塔材扫描点,b点位置为铁塔支腿的辅塔材扫描点;
14、控制机器人依次由a点、b点运动到c点,根据机器人车体上的雷达进行slam导航并记录机器人由a点到b点再到c点的行走路径。
15、进一步,所述采集姿态数据,具体为:通过惯性测量单元imu采集姿态数据;
16、所述姿态数据包括滚转角俯仰角θ和偏航角ψ,根据滚转角俯仰角θ和偏航角ψ得到x轴、y轴和z轴的旋转矩阵rx、ry、rz;根据机械臂的运动,对x轴和y轴的偏转进行补偿,计算补偿旋转矩阵,使机械臂末端的雷达恢复到与地面平行的姿态。
17、进一步,通过以下公式计算补偿旋转矩阵rl:
18、rl=rx(-φ)*ry(-θ)
19、
20、通过补偿旋转矩阵,计算出机械臂各关节的补偿角度,而调整机械臂使机械臂末端的雷达底座与地面平行。
21、进一步,所述粗扫定位铁塔支腿位置计算得到机械臂末端始终平行于地面的可达范围,具体为:
22、通过机器人车体上的雷达获取目标点云信息,并计算同一高度下机械臂末端可达位置;
23、通过判断是否存在逆运动学解来判断机械臂末端能否平行可达;
24、筛选同一高度下具有所有铁塔支腿截面信息的点云组,并通过rrt算法引导机械臂靠近最低处。
25、进一步,所述通过判断是否存在逆运动学解来判断机械臂末端能否平行可达,具体为:
26、对于在铁塔支腿上通过雷达粗扫描的点云位置pcloud(x,y,z),若满足以下条件,则该点云位置的高度属于机械臂末端在所述点云位置高度下的可达区域:
27、
28、将每个满足水平距离约束的点云位置pcloud作为机械臂末端的目标位置,假设机械臂末端姿态保持水平;然后进行逆运动学求解,有解则表示可以水平到达;无解则表示无法水平到达;
29、所述筛选同一高度下具有所有铁塔支腿截面信息的点云组,并通过rrt算法引导机械臂靠近最低处,具体为:
30、将所有由逆运动学解的点pi记录下来,筛选在同一高度下具有所有铁塔支腿截面信息的点phight={p1,p2,p3,p4…pn},表示为可切割高度;最后选取最低处作为切割高度,通过rrt算法引导机械臂进行靠近。
31、进一步,所述通过线轮廓扫描仪精扫获取铁塔支腿上切割路径点位信息,具体为:
32、1)利用pid纠偏算法调整机械臂末端的姿态,确保线轮廓扫描仪准确对准塔材的横截面;
33、2)通过分析塔材轮廓的梯度变化来检测l型结构的边界点,确认切割枪过渡至垂直平面的位置。
34、进一步,所述基于点位信息对机械臂进行逆运动学求解,移动切割枪开始切割作业,具体为:将扫描到的点位信息返回给机器人,并按照路径顺序依次对切割点进行逆运动学求解,然后启动切割枪开始沿着路径进行切割作业。
35、一种机器人的切割控制系统,包括切割路径导航模块、姿态数据采集模块、机械臂控制模块、点云数据获取模块、切割路径点位信息获取模块和机器人控制模块;
36、所述切割路径导航模块,用于进行slam导航确定切割作业的路径;
37、所述姿态数据采集模块,用于采集机器人底盘姿态数据;
38、所述点云数据获取模块,用于根据点云数据,获取铁塔支腿的位置信息;
39、所述机械臂控制模块,用于根据采集的姿态数据计算补偿旋转矩阵,通过补偿旋转矩阵计算出机械臂各个关节的补偿角度,调整机械臂,使机械臂末端的雷达底座与地面平行;且所述机械臂控制模块还用于根据点云数据确定机械臂末端水平达到的点云区域范围,并根据逆运动学解的点位信息确定切割高度的范围,控制机械臂移动到最低切割高度位置;
40、所述切割路径点位信息获取模块,用于根据线轮廓扫描仪精扫获取铁塔支腿上切割路径点位信息;
41、所述机器人控制模块,用于根据点位信息对机械臂进行逆运动学求解,控制机械臂和机械臂末端的切割枪切割作业。
42、本发明与现有技术相比具有以下有益效果:
43、本发明的引出了现代自动化技术,特别是遥控机械设备和机器人技术,能够在减少人工干预的同时,保证塔体拆除的高精度和高安全性。通过自动化切割拆除系统,工程师能够在远程控制下操作设备,精确地进行塔体的切割与倒塌操作,大大降低了人工操作中的风险,尤其是在恶劣气候、危险地形等环境下,可以避免人员直接进入高危区域,提高作业效率并确保人员安全。
44、随着输电塔维护和替换工作日益增多,传统的人工和机械拆除方式已经无法满足高效、安全和低风险的需求。本发明中的一种机器人的切割控制方法,不仅能够有效提高拆除工作的效率,减少作业过程中的安全隐患,同时还能减少对环境的二次破坏,为输电系统的安全升级和电力设施的维护提供更加高效、智能的技术手段。
- 还没有人留言评论。精彩留言会获得点赞!