一种基于深度学习的垃圾分拣机器人
本发明涉及一种机器人,具体为一种基于深度学习的垃圾分拣机器人,属于垃圾分拣。
背景技术:
1、随着现代城市科技的迅猛发展,居民生活水平的不断提升,生活垃圾的数量呈现出爆炸性增长的态势,被随意丢弃的垃圾不仅严重破坏了城市的整洁面貌与生态环境,更对传统依赖人工的垃圾分类与处理方式构成了前所未有的挑战。人工分拣这一传统模式,尽管在过去发挥了重要作用,但面对如今庞大的垃圾处理量,其固有的耗时耗力、效率低下等弊端愈发凸显,难以有效应对大规模、高强度的垃圾处理需求。同时,随着社会经济的发展,劳动力成本持续攀升,使得人工分拣的经济成本不断加重,给整个垃圾处理行业带来了沉重的经济负担。更为关键的是,人为因素如长时间工作导致的疲劳、注意力难以持续集中等,极易在分拣过程中引发错误,进而影响后续垃圾处理的效率与最终处理效果,尤其是在面对那些成分复杂多变、种类繁多且特性各异的垃圾时,人工分拣的局限性更是暴露无遗,分类结果往往难以达到理想状态;此外,传统垃圾处理方式在环保性方面的不足亦不容忽视。由于分拣不彻底或分类错误,大量可回收资源被错误地混入其他垃圾中,不仅造成了资源的极大浪费,还可能因处理不当而被污染;同时,有害物质若被误处理,更可能引发严重的环境污染问题,对生态环境造成长期且难以逆转的损害。此外,人工分拣过程中潜在的安全隐患,如锋利物品划伤、有毒有害物质直接接触等,也对从事分拣工作的人员健康构成了严重威胁,增加了职业风险。
2、鉴于人工拾取与分拣存在的诸多弊端,移动垃圾拾取领域的自动化与智能化转型已成为行业发展的必然趋势。
3、近年来,垃圾分拣机器人技术取得了显著进步。这些机器人通过集成先进的传感器、机器视觉、人工智能算法等先进技术,能够精准识别并分拣出各类垃圾,包括可回收物、有害垃圾、湿垃圾等。与传统的人工分拣相比,垃圾分拣机器人具有更高的分拣效率、更低的错误率和更强的环境适应性,有效提升了垃圾处理的自动化与智能化水平。未来,垃圾分拣机器人技术将继续向智能化、精准化方向发展。随着机器学习、深度学习等人工智能技术的不断成熟,垃圾分拣机器人将具备更强的自主学习能力,能够不断优化分拣算法,提高分拣精度和效率。同时,结合物联网、大数据等技术,垃圾分拣机器人将实现与其他设备的互联互通,构建更加完善的垃圾处理生态系统。
4、垃圾分拣移动机器人是融合了机器人底盘、控制系统模块和智能感知系统模块的创新机器人平台其设计流程包括机械、控制和智能感知三个方面。
5、首先在机械方面,采用轮式底盘作为移动平台使机器人能够在各种地面和环境中自由移动。轮式底盘通过轮胎、驱动装置和悬挂系统的组合确保了机器人具备良好的通过性和稳定性。其次,执行机构是机器人的关键组成部分,负责完成各种任务。它可以是灵活的机械臂,用于进行搬运、组装和操作等精细动作;也可以是其他类型的执行机构,如各种工具和传感器,以满足不同任务的需求。执行机构的设计和控制能力直接影响机器人的功能和性能。最后在控制方面,控制系统扮演着机器人的“大脑”角色,负责实时监控和控制机器人的运动和操作。这需要结合机械、控制和智能感知三个方面的研究内容,确保机器人系统设计的合理性,并完成机器人系统的机械零部件加工安装以及总体运动调试工作。
6、现有技术中,如公告号为cn116985090a所公开的智能垃圾分拣机器人,包括运动模块、动作模块和控制系统;运动模块包括四个麦克纳姆轮和电机构成的底盘行走装置;动作模块包括六轴机械臂和机械爪;六轴机械臂的腕部安装有intel realsense d455双目相机;底层控制系统完成电机和舵机的控制及避障传感器信号处理,上层处理系统基于激光雷达和ros完成slam建图、定位与导航、垃圾的分类以及定位和机械臂抓取的路径规划,经上层处理系统处理后的信息通过串口通信下发到底层控制系统,调节电机的速度以及控制机械臂的各个舵机,从而控制机器人的移动和机械臂的运动。本发明通过对指定区域生活垃圾的识别,辨别所属的垃圾类型,完成定位、拾取、分类操作,通过机器人的移动搜寻、实现指定区域全自动无人化垃圾分拣工作,尽管当前市场上已有部分自动化分拣设备投入使用,但其普及程度尚显不足,且技术水平参差不齐,难以全面覆盖并满足垃圾处理行业对于高效、精准分拣的迫切需求。尤为关键的是,缺乏先进的智能识别系统与高效算法的支撑,使得现有系统难以快速、准确地识别并分拣出各类垃圾,尤其是那些形态各异、特征复杂的垃圾,从而限制了垃圾处理效率与准确性的进一步提升,此外,现有机器人虽然能够实现对垃圾的自动抓取、输送与分拣,但分拣效率较低,且分拣的准确性也较低,无法实际有效的缓解人工分拣的压力。无法完善的垃圾分类图像特征数据库,未能够利用大数据分析技术优化分拣策略,进而导致无法提升系统的适应性与稳定性,无法确保在不同场景下都能实现高效、准确的分拣。
技术实现思路
1、本发明的目的就在于为了解决上述至少一个技术问题而提供一种基于深度学习的垃圾分拣机器人。
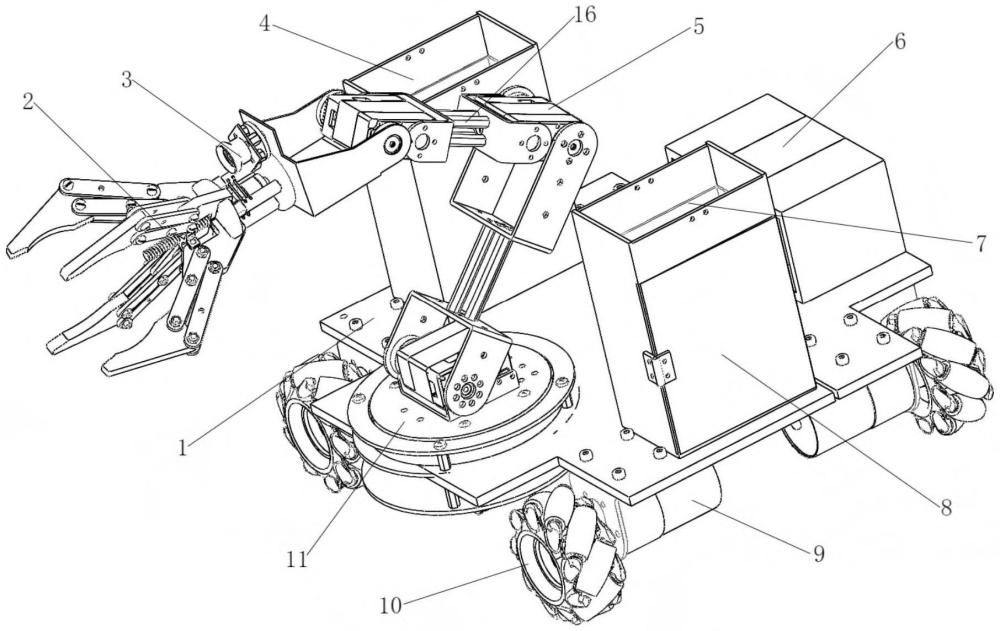
2、本发明通过以下技术方案来实现上述目的:一种基于深度学习的垃圾分拣机器人,包括机架主体、行进机构、机械臂机构、垃圾贮存机构和控制主机,行进机构设置于机架主体的下部,机械臂机构设置于机架主体的前端,垃圾贮存机构置于机架主体两侧,且贮存机构与机架主体连接,控制主机安装在机架主体上;
3、控制主机内集成有垃圾识别系统,垃圾识别系统由导航模块、目标识别模块、分拣控制模块、主控芯片、无线通讯模块以及上位机模块构成,导航模块、目标识别模块、分拣控制模块、无线通讯模块和上位机模块均与主控芯片呈信号传输连接。
4、作为本发明再进一步的方案:机架主体包括两块支撑底板,两块支撑底板的对接底面连接有对接座,机械臂机构和垃圾贮存机构安装在机架主体的其中一块支撑底板的上板面,控制主机安装在机架主体的另一块支撑底板的上板面,且另一块支撑底板的下板面固定连接有蓄电池。
5、作为本发明再进一步的方案:行进机构包括减速电机和麦克纳姆轮,麦克纳姆轮分别转动连接在机架主体的四角处,且四个麦克纳姆轮互相对称状设置,每个麦克纳姆轮均配套连接有减速电机,减速电机和麦克纳姆轮通过联轴器连接。
6、作为本发明再进一步的方案:机械臂结构包括机械爪、舵机、云台和连杆,连杆两端分别与舵机连接,舵机设置有三个,云台与机架主体固定连接,位于最底端的舵机安装在云台上,位于最上端的舵机连接有机械爪。
7、作为本发明再进一步的方案:垃圾贮存机构设置有两个,垃圾贮存机构包括主箱体、拆卸式垃圾篓和合页门,主箱体上端无盖、拆卸式垃圾篓内置在主箱体内,合页门活动连接在主箱体的一侧。
8、作为本发明再进一步的方案:垃圾识别系统的目标识别模块通过 ssd_mobilenet_v2深度学习算法对摄像头获取的图像进行目标检测以及目标分类,垃圾识别系统的分拣控制模块包括摄像头和接触感应器,摄像头安装在最上端舵机的正前方,接触感应器连接在机械爪的爪心处。
9、作为本发明再进一步的方案:垃圾识别系统的导航模块包括激光雷达,激光雷达安装在云台的底端。
10、本发明的有益效果是:本发明能够实时捕捉并分析垃圾堆中的复杂图像数据。借助深度学习的强大力量,这些图像被迅速转化为精准的分类信息,无论是可回收的纸张、塑料、金属,还是有害的电池、化学品,亦或是其他类型的垃圾,都能被准确无误地区分开来。这一过程不仅极大地提升了分类的准确率,还显著加快了处理速度,彻底改变了传统人工分拣的低效与易错局面。
11、本发明通过高精度激光雷达具有环境感知能力,能够自主规划路径,灵活避开各类障碍物,确保平台的安全高效作业。结合gps与惯性导航系统的双重保障,即便在无gps信号的室内或复杂地形中,平台也能实现精准定位与路径优化,极大地扩展了其应用场景的边界。
12、本发明实现了工作状态与分拣数据的实时上传至云端服务器。这一创新举措,使得管理人员能够跨越时空的限制,通过手机app或电脑端远程监控平台的运行情况,并根据实时数据调整工作策略,优化资源配置。同时,强大的数据分析功能也为城市垃圾管理提供了科学依据,助力管理者做出更加智能化的决策。
13、本发明采用了模块化结构,这种设计赋予了它极高的灵活性与可扩展性。根据实际需求,平台可以轻松配置不同功能的模块,如增加机械臂以实现更精细的抓取操作,或增设传感器以提升环境感知能力。此外,随着机器学习算法的持续优化和新技术的不断涌现,平台还能轻松升级,始终保持技术领先性,满足未来更多元化的垃圾处理需求。
- 还没有人留言评论。精彩留言会获得点赞!