一种高速精密涂胶方法和相关系统与流程
本技术涉及机动车和机器人相关,具体涉及一种高速精密涂胶方法和相关系统。
背景技术:
1、生活中,汽车玻璃作为汽车的设计元素之一,不仅仅可以为用户提供开阔视野的驾驶体验,而且,还能够增加车辆的外观吸引力。
2、目前来看,汽车玻璃同样也是车辆重要的安全部件,其需要具备更高的防震能力和强度。随着汽车玻璃表面积占比的提高,从而,给汽车复杂曲面玻璃涂胶工艺装备带来挑战,因此,如何提升涂胶效率的问题亟待解决。
技术实现思路
1、本技术实施例提供了一种高速精密涂胶方法和相关系统,能够提升涂胶效率。
2、第一方面,本技术实施例提供一种高速精密涂胶方法,应用于涂胶机器人,所述涂胶机器人包括:机器人本体、涂胶枪、第一固定部件、第二固定部件和视觉系统,所述机器人本体通过机械臂连接所述涂胶枪,所述方法包括:
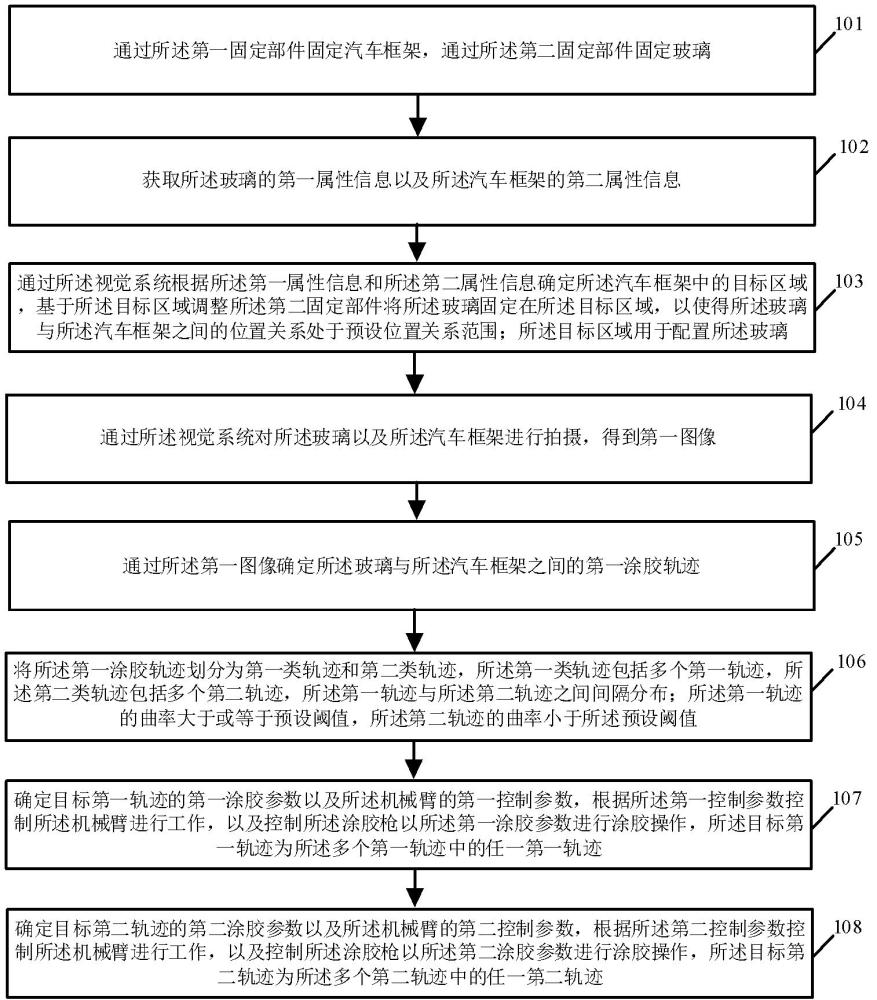
3、通过所述第一固定部件固定汽车框架,通过所述第二固定部件固定玻璃;
4、获取所述玻璃的第一属性信息以及所述汽车框架的第二属性信息;
5、通过所述视觉系统根据所述第一属性信息和所述第二属性信息确定所述汽车框架中的目标区域,基于所述目标区域调整所述第二固定部件将所述玻璃固定在所述目标区域,以使得所述玻璃与所述汽车框架之间的位置关系处于预设位置关系范围;所述目标区域用于配置所述玻璃;
6、通过所述视觉系统对所述玻璃以及所述汽车框架进行拍摄,得到第一图像;
7、通过所述第一图像确定所述玻璃与所述汽车框架之间的第一涂胶轨迹;
8、将所述第一涂胶轨迹划分为第一类轨迹和第二类轨迹,所述第一类轨迹包括多个第一轨迹,所述第二类轨迹包括多个第二轨迹,所述第一轨迹与所述第二轨迹之间间隔分布;所述第一轨迹的曲率大于或等于预设阈值,所述第二轨迹的曲率小于所述预设阈值;
9、确定目标第一轨迹的第一涂胶参数以及所述机械臂的第一控制参数,根据所述第一控制参数控制所述机械臂进行工作,以及控制所述涂胶枪以所述第一涂胶参数进行涂胶操作,所述目标第一轨迹为所述多个第一轨迹中的任一第一轨迹;
10、确定目标第二轨迹的第二涂胶参数以及所述机械臂的第二控制参数,根据所述第二控制参数控制所述机械臂进行工作,以及控制所述涂胶枪以所述第二涂胶参数进行涂胶操作,所述目标第二轨迹为所述多个第二轨迹中的任一第二轨迹。
11、第二方面,本技术实施例提供一种高速精密涂胶系统,应用于涂胶机器人,所述涂胶机器人包括:机器人本体、涂胶枪、第一固定部件、第二固定部件和视觉系统,所述机器人本体通过机械臂连接所述涂胶枪,所述高速精密涂胶系统包括:固定单元、获取单元、确定单元、拍摄单元、划分单元和控制单元,其中,
12、所述固定单元,用于通过所述第一固定部件固定汽车框架,通过所述第二固定部件固定玻璃;
13、所述获取单元,用于获取所述玻璃的第一属性信息以及所述汽车框架的第二属性信息;
14、所述确定单元,用于通过所述视觉系统根据所述第一属性信息和所述第二属性信息确定所述汽车框架中的目标区域,基于所述目标区域调整所述第二固定部件将所述玻璃固定在所述目标区域,以使得所述玻璃与所述汽车框架之间的位置关系处于预设位置关系范围;所述目标区域用于配置所述玻璃;
15、所述拍摄单元,用于通过所述视觉系统对所述玻璃以及所述汽车框架进行拍摄,得到第一图像;
16、所述确定单元,还用于通过所述第一图像确定所述玻璃与所述汽车框架之间的第一涂胶轨迹;
17、所述划分单元,用于将所述第一涂胶轨迹划分为第一类轨迹和第二类轨迹,所述第一类轨迹包括多个第一轨迹,所述第二类轨迹包括多个第二轨迹,所述第一轨迹与所述第二轨迹之间间隔分布;所述第一轨迹的曲率大于或等于预设阈值,所述第二轨迹的曲率小于所述预设阈值;
18、所述控制单元,用于确定目标第一轨迹的第一涂胶参数以及所述机械臂的第一控制参数,根据所述第一控制参数控制所述机械臂进行工作,以及控制所述涂胶枪以所述第一涂胶参数进行涂胶操作,所述目标第一轨迹为所述多个第一轨迹中的任一第一轨迹;以及确定目标第二轨迹的第二涂胶参数以及所述机械臂的第二控制参数,根据所述第二控制参数控制所述机械臂进行工作,以及控制所述涂胶枪以所述第二涂胶参数进行涂胶操作,所述目标第二轨迹为所述多个第二轨迹中的任一第二轨迹。
19、第三方面,本技术实施例提供了一种涂胶机器人,包括处理器、存储器、通信接口以及一个或多个程序,其中,上述一个或多个程序被存储在上述存储器中,并且被配置由上述处理器执行,上述程序包括用于执行本技术实施例第一方面中的步骤的指令。
20、第四方面,本技术实施例提供了一种计算机可读存储介质,其中,上述计算机可读存储介质存储用于电子数据交换的计算机程序,其中,上述计算机程序使得计算机执行如本技术实施例第一方面中所描述的部分或全部步骤。
21、第五方面,本技术实施例提供了一种计算机程序产品,其中,上述计算机程序产品包括存储了计算机程序的非瞬时性计算机可读存储介质,上述计算机程序可操作来使计算机执行如本技术实施例第一方面中所描述的部分或全部步骤。该计算机程序产品可以为一个软件安装包。
22、实施本技术实施例,具备如下有益效果:
23、可以看出,本技术实施例中所描述的高速精密涂胶方法和相关系统,应用于涂胶机器人,所述涂胶机器人包括:机器人本体、涂胶枪、第一固定部件、第二固定部件和视觉系统,所述机器人本体通过机械臂连接所述涂胶枪,通过所述第一固定部件固定汽车框架,通过所述第二固定部件固定玻璃;获取所述玻璃的第一属性信息以及所述汽车框架的第二属性信息;通过所述视觉系统根据所述第一属性信息和所述第二属性信息确定所述汽车框架中的目标区域,基于所述目标区域调整所述第二固定部件将所述玻璃固定在所述目标区域,以使得所述玻璃与所述汽车框架之间的位置关系处于预设位置关系范围;所述目标区域用于配置所述玻璃;通过所述视觉系统对所述玻璃以及所述汽车框架进行拍摄,得到第一图像;通过所述第一图像确定所述玻璃与所述汽车框架之间的第一涂胶轨迹;将所述第一涂胶轨迹划分为第一类轨迹和第二类轨迹,所述第一类轨迹包括多个第一轨迹,所述第二类轨迹包括多个第二轨迹,所述第一轨迹与所述第二轨迹之间间隔分布;所述第一轨迹的曲率大于或等于预设阈值,所述第二轨迹的曲率小于所述预设阈值;确定目标第一轨迹的第一涂胶参数以及所述机械臂的第一控制参数,根据所述第一控制参数控制所述机械臂进行工作,以及控制所述涂胶枪以所述第一涂胶参数进行涂胶操作,所述目标第一轨迹为所述多个第一轨迹中的任一第一轨迹;确定目标第二轨迹的第二涂胶参数以及所述机械臂的第二控制参数,根据所述第二控制参数控制所述机械臂进行工作,以及控制所述涂胶枪以所述第二涂胶参数进行涂胶操作,所述目标第二轨迹为所述多个第二轨迹中的任一第二轨迹,其一,能够通过第一固定部件固定汽车框架,通过第二固定部件固定玻璃,能够减少由于机械振动或不稳定性引起的间隙变动,提高涂胶过程中的整体稳定性,由于玻璃的第一属性信息在一定程度上反映了玻璃特性,汽车框架的第二属性信息在一定程度上反映了汽车的相关特性,则可以通过视觉系统根据第一属性信息和第二属性信息确定汽车框架中的目标区域,以使得玻璃与汽车框架之间的位置关系处于预设位置关系范围,进行初步保证后续涂胶工作,其二,可以将玻璃边角的轨迹转弯段以及非玻璃边角的轨迹转弯段加以区分,基于具体结构特性,实现对应的涂胶,从而,能够降低涂胶缺陷出现的概率,能够实现针对性涂胶,以保证涂胶效果,也可以提升涂胶效率以及智能性,以及涂胶机器人的智能性。
- 还没有人留言评论。精彩留言会获得点赞!