一种移动平台式电磁操控系统
本发明涉及领域电磁驱动,具体涉及一种移动平台式电磁操控系统。
背景技术:
1、微机器人是尺度在亚毫米及以下,能够通过操控进行自主运动的一类小尺度机器人。由于磁场的生物相容性、高实时性和高可控性,是微机器人在生物医学领域的重要操控方式。但是磁驱动式微机器人在运动范围、高频率精度操控等方面仍然存在限制。传统的电磁线圈平台应用在平台连接装置,且电磁线圈位置和大小固定,需要更换电磁线圈尺寸时必须完全更换整个电磁线圈系统,且更换电磁线圈接法时需要断电和人工操作。相应的闭环控制算法由于电磁线圈系统组成和环境的差异,不具备普适性和较高的可调性,且对于高频率磁场的生成精度不足。
技术实现思路
1、根据现有技术的不足,本发明的目的是提供一种移动平台式电磁操控系统,可以通过步进电机的控制实现电磁线圈的亥姆霍兹与麦克斯韦连接方式的转换,能够有效地应用在各类型的电磁线圈的电流控制之中。
2、为了解决上述技术问题,本发明采用的技术方案为:
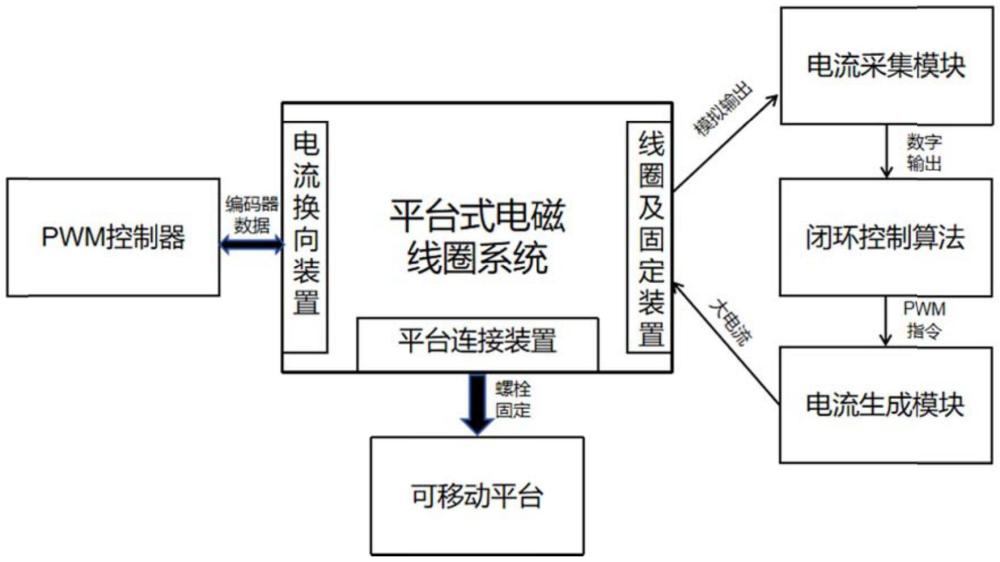
3、一种移动平台式电磁操控系统,包括:
4、基础箱体,设置有若干个步进电机,每一所述步进电机的输出轴上设置有电刷轴套,所述电刷轴套上设置有水平方向设置的横臂,所述横臂的两端设置有两个电刷,每一所述电刷外侧设置一个继电板,每一所述步进电机转动以带动两个电刷与相对应的两个继电板接触或不接触;
5、若干组电磁线圈,每组电磁线圈包括2个电磁线圈,一个所述电磁线圈的两端分别与一个步进电机对应的两个继电板电性连接,另一个所述电磁线圈的两端分别与该步进电机对应的两个电刷电性连接;
6、上位机,控制3个所述步进电机正转或反转。
7、进一步地,还包括旋转编码器,所述旋转编码器固定在步进电机的输出轴上,所述电刷轴套固定在旋转编码器的输出轴上。
8、进一步地,所述基础箱体固定在平台连接装置上,所述平台连接装置滑动连接于可移动平台以使所述平台连接装置在可移动平台上滑动。
9、进一步地,所述电磁线圈为x轴电磁线圈、y轴电磁线圈或z轴电磁线圈,还包括第一电磁线圈固定件、第二电磁线圈固定件和第三电磁线圈固定件;
10、2个所述x轴电磁线圈分别一一对应的设置于2个第一电磁线圈固定件内,该2个第一电磁线圈固定件水平横向方向滑动连接于所述基础箱体以驱动2个所述x轴电磁线圈相对于所述基础箱体水平横向方向滑动以产生x轴方向磁场;
11、2个所述y轴电磁线圈分别一一对应的设置于另外2个第二电磁线圈固定件内,该另外2个第一电磁线圈固定件水平横向方向滑动连接于所述基础箱体以驱动2个所述y轴电磁线圈相对于所述基础箱体水平横向方向滑动以产生y轴方向磁场;
12、2个所述z轴电磁线圈分别一一对应的设置于2个第三电磁线圈固定件内,2个第三电磁线圈固定件竖直方向滑动连接于基础箱体以驱动2个z轴电磁线圈相对于基础箱体竖直方向滑动以产生z轴方向磁场。
13、进一步地,所述基础箱体上设置有中心区域,若干个步进电机包括均设置于中心区域的x轴步进电机、y轴步进电机和z轴步进电机,中心区域四角分别向外延伸设置有四个滑动槽,两两所述滑动槽之间形成楔形结构,所述第一电磁线圈固定件或第二电磁线圈固定件固定于电磁线圈移动件,所述电磁线圈移动件两侧分别设置有容纳槽,所述容纳槽内置有肩块,所述肩块与所述容纳槽通过弹性件弹性连接,所述电磁线圈移动件的中部位于所述楔形结构上且两侧的两个所述肩块分别一一对应地滑动连接于两个所述滑动槽。
14、进一步地,每一所述滑动槽靠近两个所述楔形结构的两侧分别设置有x轴电气外簧片和y轴电气外簧片;
15、所述x轴步进电机对应的两个所述继电板与其中两个所述x轴电气外簧片电性连接,所述x轴步进电机对应的两个所述电刷与另外两个所述x轴电气外簧片电性连接,两个所述x轴电磁线圈的两端均电性连接有x轴电气内簧片,其中,一个x轴电磁线圈电性连接的两个x轴电气外簧片能够与两个所述继电板电性连接的两个所述x轴电气内簧片接触或不接触以实现x轴电磁线圈的接通与断开,另一个x轴电磁线圈电性连接的两个x轴电气外簧片能够与两个所述电刷电性连接的两个所述x轴电气内簧片接触或不接触以实现x轴电磁线圈的接通与断开;
16、所述y轴步进电机对应的两个所述继电板与其中两个所述y轴电气外簧片电性连接,所述y轴步进电机对应的两个所述电刷与另外两个所述y轴电气外簧片电性连接,两个所述y轴电磁线圈的两端均电性连接有y轴电气内簧片,其中,一个y轴电磁线圈电性连接的两个y轴电气外簧片能够与两个所述继电板电性连接的两个所述y轴电气内簧片接触或不接触以实现y轴电磁线圈的接通与断开,另一个y轴电磁线圈电性连接的两个y轴电气外簧片能够与两个所述电刷电性连接的两个所述y轴电气内簧片接触或不接触以实现y轴电磁线圈的接通与断开。
17、进一步地,所述第三电磁线圈固定件通过电磁线圈驱动机构驱动相对于基础箱体竖直方向滑动,所述电磁线圈驱动机构包括丝杠电机和转动丝杠,所述转动丝杠与丝杠电机的输出轴固定连接,2个所述第三电磁线圈固定件间隔一定距离滑动连接于转动丝杠。
18、进一步地,上位机内置闭环控制算法模块,所述闭环控制算法模块包括信号预处理模块,卡尔曼滤波器,史密斯预测校正器和最优控制器,其中
19、信号预处理模块用于对电磁线圈进行标定以获取电磁线圈的电流;
20、卡尔曼滤波器用于确定获取电磁线圈的电流的过程噪声和测量噪声;
21、史密斯预测校正器用于将控制过程进行延迟,对卡尔曼滤波器得到的估计值进行比较并进行校正;
22、最优控制器用于输出步进电机的最优电流。
23、进一步地,在闭环控制算法模块中建立状态反馈控制器,通过状态反馈控制器进行自适应控制。
24、进一步地,信号预处理模块通过电流传感器对电磁线圈进行标定以获取电磁线圈的电流,计算公式为:
25、uo=k1·u+k2·i
26、其中,uo为传感器芯片的输出电压,u是传感器芯片的偏置电压,i为电磁线圈的电流,k1和k2为对应的比例系数;
27、卡尔曼滤波器确定获取电磁线圈的电流的过程噪声和测量噪声的计算公式为:
28、
29、其中,是卡尔曼滤波器的估计系统状态值,为估计磁场值,为估计电流值,d是指系统的时域延迟系数,为采样频率和输出频率比值向上取整,p是估计误差的协方差矩阵,rv为测量噪声矩阵,aj、bj、cj、dj分别对应系统模型对应的参数矩阵,k表示上位机循环的当前时步,α表示线圈电流与所生成磁场的映射关系,xj(k)为k时刻的系统状态变量,uj(k-dj)为当前轴生成磁场所需电流对应的pwm的电压;
30、史密斯预测校正器将控制过程进行延迟,对卡尔曼滤波器得到的估计值进行比较并进行校正的计算公式为:
31、
32、
33、其中,xp(k)和ip(k)表示k时步的史密斯预测校正器无时延系统的状态预测值和无时延电流预测值,xpd(k)和ipd(k)表示k时步的史密斯预测校正器时延系统的状态预测值和无时延电流预测值;
34、最优控制器输出电磁线圈的最优电流的计算公式为:
35、
36、其中,表示基于k时步对于k+1时步的卡尔曼预测值,x(k)和i(k)表示通过史密斯预测校正器部分计算得到的用于最优控制器进行控制的k时步的系统状态值和电流值,表示基于uj(k-d)和电磁线圈电压与电流映射关系β计算得到的卡尔曼预测值。
37、与现有技术相比,本发明具有以下优点和有益效果:
38、本发明提供的一种移动平台式电磁操控系统,通过上位机以控制若干个步进电机正转或反转,可以使电刷轴套带动两个电刷旋转进而改变若干组电磁线圈的电流流向,从而改变电磁线圈连接方式的类型,实现电磁线圈的亥姆霍兹与麦克斯韦连接方式的转换,能够有效地应用在各类型的电磁线圈的电流控制之中,且当每一步进电机转动以带动两个电刷与相对应的两个继电板接触时,1组电磁线圈中的2个电磁线圈并联,能够实现磁场的叠加。
- 还没有人留言评论。精彩留言会获得点赞!