一种下肢助力外骨骼机器人
本发明涉及外骨骼机器人领域,尤其是涉及一种下肢助力外骨骼机器人。
背景技术:
1、外骨骼机器人是一种能够提升人体运动能力、辅助或恢复体能的可穿戴机械装置。随着生物医学工程技术的发展,外骨骼机器人被广泛应用于康复医学、老年人护理、军事领域以及工业生产等多个领域,特别是在帮助行动不便的患者恢复运动功能以及为劳动者提供外部助力方面,外骨骼展现了巨大的应用潜力。
2、根据驱动方式可以将外骨骼助力装置分为有源外骨骼装置和无源外骨骼装置,无源外骨骼装置一般通过储能机构或适当的力传递将运动中被动消耗的能量储存起来,并在运动中需要人体肌肉做出正功的时候释放这些能量、输出助力。这类装置结构简单、重量轻,但助力效果有限,通常适用于较轻的辅助需求。有源外骨骼装置则使用电动或气动系统驱动,使装置中的各个关节主动产生运动,这种技术可以大幅提升穿戴者的负载能力,助力效果明显,特别适用于康复治疗和重体力劳动中。但有源外骨骼也存在一些技术难题,主要表现在:设备重量较重、控制系统复杂、与人体运动的协同性差、使用时的舒适度差等。
3、近年来,设计者们通过多种手段优化驱动系统、改进控制算法,并结合人体工程学原理,致力于提升外骨骼的适应性、协同性及便捷性。
4、中国专利申请cn 118078585 a公开了一种下肢外骨骼装置及腿部康复器械,其髋关节和膝关节的运动以及腿部长度调节均通过电机实现,从而能在控制模块的控制下驱动关节运动和腿长的自动调节。中国专利申请cn 115582825 a公开了一种无源下肢外骨骼,其在髋关节助力模块、髋关节助力模块中通过弹簧和偏心轮的配合实现无源助力。中国专利申请cn 112060060a公开了一种主被动混合驱动的下肢助力外骨骼机器人及控制方法,该方法将髋关节设计为被动驱动式,将膝关节设计为主动驱动式。腿部机构中包含驱动电机、谐波减速器、传动机构和传感器系统,能够实现对膝关节的主动助力,但该系统的主要缺点在于控制系统较为复杂,需要高精度的传感器和控制算法进行实时调节。
5、虽然现有的外骨骼设计在助力功能和协同运动上有所改进,但普遍存在重量大、操作复杂、适应性差等问题。尤其是对于下肢助力外骨骼,如何使结构更加符合人体生物力学,提升与穿戴者的运动协同性,并在保证助力效果的同时降低系统的复杂度和重量,仍然是一个亟待解决的技术难题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供了一种穿戴助力效果好、与穿戴者协同性好以及控制简便的下肢助力外骨骼机器人。
2、本发明的目的可以通过以下技术方案来实现:
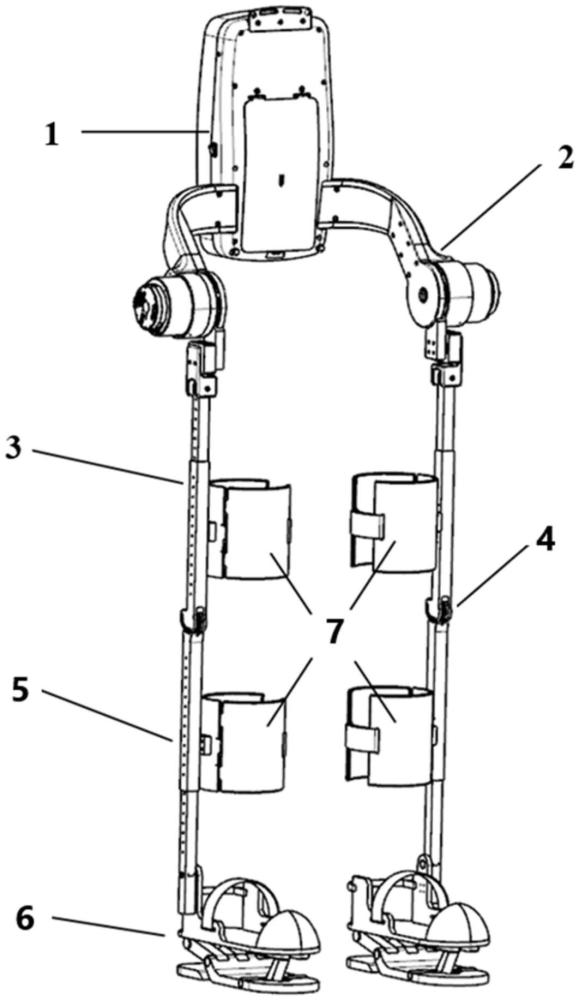
3、一种下肢助力外骨骼机器人,包括带控制器的箱体式靠背组件,所述箱体式靠背组件的两侧通过髋关节运动机构与腿部组件连接,每侧腿部组件包括自上而下依次设置的大腿外骨骼机构、小腿外骨骼机构和足部助力机构;所述大腿外骨骼机构包括第一端和第二端,所述小腿外骨骼机构包括第三端和第四端,所述第一端与髋关节运动机构连接,所述第四端与足部助力机构连接;所述第二端和第三端通过助力弹簧连接,形成膝关节助力机构;
4、所述第二端的外轮廓为j型,且勾体朝向膝盖后侧,包括左右侧板,所述左右设置的侧板上开设有用于限制膝关节运动范围的第一弧形槽,所述第一弧形槽与左右侧板下边缘的距离相等,所述左右侧板之间安装有椭圆形块和圆柱块,所述圆柱块上开设有用于安装助力弹簧上端并进行运动限位的槽;
5、所述第三端包括弧形凸台,所述弧形凸台上方固定有左右两侧外扩于弧形凸台设置的弧形板,所述弧形板的上端面与椭圆形块配合,所述弧形板和弧形凸台之间形成第二弧形槽,所述左右侧板的下边缘位于所述第二弧形槽内,所述弧形板的左右侧边位于所述第一弧形槽内,所述第三端前侧开设有用于安装助力弹簧下端的弹簧安装孔。
6、优选地,所述大腿外骨骼机构包括通过外管与内管组成的第一长度调节组件,用于调节第一端与第二端间的距离;所述小腿外骨骼机构包括外管与内管组成第二长度调节组件,用于调节第三端与第四端之间的距离。
7、优选地,所述第一端位于内管上,所述第二端位于外管上,所述第三端位于外管上,所述第四端位于内管上。
8、优选地,所述髋关节运动机构包括两侧对称设置的髋板,两侧设置的髋板靠近所述箱体式靠背组件的一端分别贯穿所述箱体式靠背组件两侧设置的孔进入所述箱体式靠背组件后,通过设有的长孔连接以调节两个髋板之间的距离。
9、优选地,所述髋关节运动机构还包括两侧对称设置的电机安装座、驱动电机、连接法兰、护板、力传感装置和大腿外骨骼安装座;
10、所述髋板远离所述箱体式靠背组件的一端连接电机安装座,所述电机安装座上安装所述驱动电机,所述连接法兰安装在所述驱动电机的输出端面上,所述护板与所述髋板连接后封盖所述驱动电机和连接法兰;
11、所述力传感装置的一侧与连接法兰连接,另一侧与大腿外骨骼安装座连接,所述力传感装置与箱体式靠背组件中的控制器电路连接,所述控制器根据采集到的大腿外骨骼承受扭力值调节驱动电机的输出强度,所述第一端与大腿外骨骼安装座通过圆轴连接。
12、优选地,所述箱体式靠背组件与穿戴者的接触面为曲面,所述曲面与人体腰部曲面相适应。
13、优选地,所述足部助力机构包括足部支撑板,所述足部支撑板底部设置有足部助力装置,所述足部助力装置包括前足弹性板、前足支撑杆、后足弹性板和后足支撑杆;
14、所述前足弹性板和前足支撑杆通过前足弹性铰链连接,所述前足弹性板、后足弹性板和后足支撑杆通过足跟弹性铰链连接,所述后足支撑杆与足部支撑板之间通过转轴连接。
15、优选地,所述前足弹性板和前足支撑杆之间的夹角为锐角,所述后足弹性板和后足支撑杆之间的夹角为锐角。
16、优选地,所述足部助力机构与第四端通过卷簧连接,所述卷簧位于第四端的空腔内,所述卷簧的一端固定在所述第四端的侧面开孔内,另一端安装在足部助力机构的转轴槽内。
17、优选地,所述大腿外骨骼机构和/或小腿外骨骼机构上安装有用于与穿戴者腿部绑定的自适应绑缚装置;
18、所述自适应绑缚装置包括用于与外骨骼结构固定的固定板,所述固定板两侧通过弹性铰链连接有侧板,两个所述侧板的另一端通过绑带连接,通过绑带缠绕在穿戴者腿部完成绑定。
19、与现有技术相比,本发明具有以下有益效果:
20、(1)膝关节助力机构上端的外轮廓为“j”型,使膝关节的运动轨迹接近人体膝关节的自然运动轨迹,降低协调性差异,并且关节中含有储能弹簧,实现对膝关节运动的助力。
21、(2)足部助力机构的上端与小腿外骨骼通过卷簧连接实现踝关节助力,足部助力机构下端含有足底支撑装置,由前足弹性板、前足支撑杆、后足弹性板和后足支撑杆组成,通过之间的转轴连接,并且连接轴上有弹簧,分别实现对前足和后足的支撑助力,即足部助力机构在踝关节转动和足底支撑方面为穿戴者提供助力。
22、(3)整个下肢外骨骼机器人仅在髋关节运动机构布设两个驱动电机,控制更加简便,驱动元件数量少,降低了下肢外骨骼机器人的自重。
23、(4)髋关节运动机构根据力传感装置采集到的大腿外骨骼承受扭力值实时调整电机的输出扭力,可实现穿戴者在不同动作场景下的受力自适应调整,提高了运动的协调性和响应性。
24、(5)箱体式背部组件可容纳助力控制器等元器件,且其正面为曲面,接近于人体腰部的生理曲线,便于与人体背部贴合,提高了穿戴者的舒适性。
25、(6)大腿外骨骼机构和小腿外骨骼机构均为内管和外管嵌套设置,可自适应调整大腿外骨骼和小腿外骨骼的长度,同时结合两侧间距可调的髋板,适用于不同体型的穿戴者。
- 还没有人留言评论。精彩留言会获得点赞!