风力发电机塔筒法兰连接螺栓检测机器人
本技术属于风电运维攀爬机器人,特别涉及一种风力发电机塔筒法兰连接螺栓检测机器人。
背景技术:
1、风能作为一种清洁可再生的绿色资源,对于减少碳排放、缓解温室效应、促进环境和经济社会的健康可持续发展具有重要作用。伴随着风电产业的高速发展,对风力发电机的核心要求是更高的发电效率和更少的维护成本。目前,中国在役风力发电机数量巨大且服役多年,风机能否在运转时期发挥最佳性能是衡量发电效率的关键因素之一。因此,对在役风力发电机生命周期内的运营维护将是我们面临的巨大挑战。
2、风力发电机的核心零部件包括叶片、塔筒、发电机、齿轮箱、轴承、轮毂等。在风力发电机结构中,塔筒起到承载支撑机舱中关键零部件载荷的作用。塔筒为变节径、变厚度的空心筒状结构,一般为三段式结构,即下塔筒段、中塔筒段、上塔筒段,筒段与筒段之间通过法兰和螺栓连接。一旦塔筒出现结构失效问题,整台风力发电机可能发生倒塌现象,造成不可逆转的损失。
3、由于我国风电项目主要分布在山地、高原、沿海等风力资源丰富的地区,风力发电机塔筒载荷工况极为恶劣,而法兰螺栓又是塔筒上的关键连接部件。法兰处连接螺栓一旦出现微裂纹等缺陷,对塔筒的可靠性以及对整台风力发电机组的正常运行产生威胁。
4、目前,螺栓裂纹检测有如下方法:目视检查:通过肉眼观察螺栓表面是否有裂纹或变形,检测方法简单,但只适用于裂纹比较显而易见的情况。超声波检测:通过超声波探测设备发送超声波进行检测,当超声波遇到裂纹或其他缺陷时会发生反射或衍射,从而可以检测出螺栓内部的裂纹情况。磁粉检测:在螺栓表面涂上磁粉,通过施加磁场,当螺栓存在裂纹时,裂纹处会吸引磁粉,形成可见的磁粉堆积,从而可以发现螺栓的裂纹,但需要将螺栓拆卸下来,不适用于在役风力发电机的无损检测。目前,工程中应用最多的检测方法为超声波检测法,但该方法需要人工手持超声检测设备,通过塔筒内部升降电梯到达法兰处位置,对螺栓依次进行检测。该方法对人工技术要求高,螺栓数目多,人为检测可能存在一定检测误差,且高空作业存在一定安全风险。
5、因此,本实用新型专利提出了一种塔筒法兰连接螺栓检测机器人,能够稳定吸附于塔筒法兰处,搭载超声检测设备,沿法兰运作一周,完成连接螺栓自动化无损检测,旨在提高检测效率,降低运维成本,降低作业安全风险。
技术实现思路
1、针对上述技术问题,本实用新型的目的是提供一种风力发电机塔筒法兰连接螺栓检测机器人,实现在风机塔筒法兰上稳定吸附,并且能够沿塔筒法兰一周移动,通过搭载的超声检测设备,完成连接螺栓裂纹的自动化无损检测。
2、为了实现上述目的,本实用新型提供了如下技术方案:
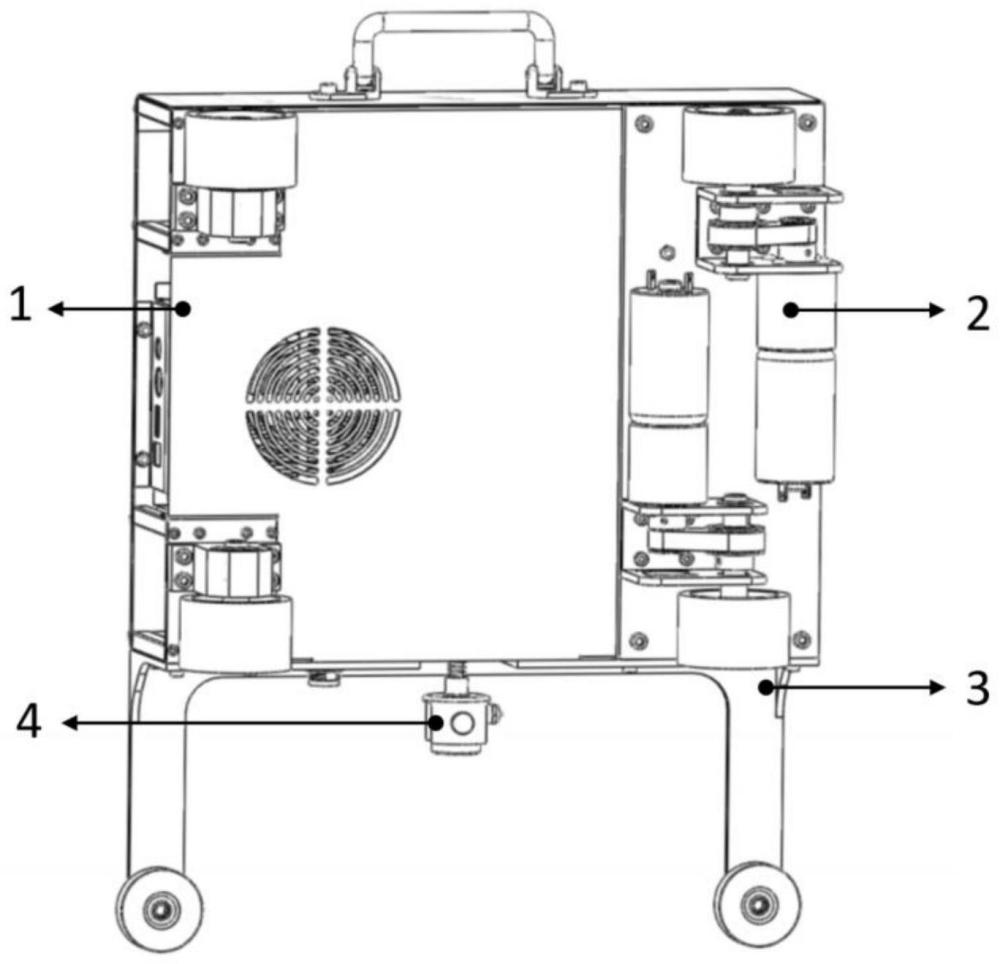
3、一种风力发电机塔筒法兰连接螺栓检测机器人,包括机器人机身1、吸附移动装置2、辅助支撑装置3、螺栓检测装置4,其特征在于:所述机器人机身1为框架式结构,采用铝合金材质,包括第一铝合金板11、驱动部分铝合金固定板12、从动部分铝合金固定板13、侧围钣金件14、底部钣金件15、2020型铝合金型材16、1020型铝合金型材17、铝合金拉手18;
4、所述吸附移动装置2包括驱动部分21、从动部分22;
5、所述驱动部分21包括直流减速电机211、主动带轮212、同步带213、从动带轮214、驱动轮轴215、驱动轴支撑轴承216、驱动部分固定支架217、驱动永磁轮218;
6、所述从动部分22包括双轴承t型轴承座221、从动轮轴222、从动永磁轮223;
7、所述辅助支撑装置3包括支撑支架31、橡胶支撑轮32;
8、所述螺栓检测装置4包括检测设备41、螺栓识别组件42、探头执行组件43;
9、所述螺栓识别组件42包括螺栓识别传感器固定支架421、螺栓识别传感器422;
10、所述探头执行组件43包括直线电机模组431、电机模组支架432、执行组件支架433、直线轴承434、导向轴435、复位弹簧436、探头夹具437、检测探头438;
11、所述机器人机身1中整体框架由第一铝合金板11、驱动部分铝合金固定板12、从动部分铝合金固定板13、侧围钣金件14、底部钣金件15、2020型铝合金型材16、1020型铝合金型材17通过螺栓固接而成,铝合金拉手18通过螺栓固接于侧围钣金件14和2020型铝合金型材16上;
12、所述驱动部分21中直流减速电机211与驱动部分固定支架217通过螺栓固接;所述驱动部分21中直流减速电机211输出轴通过圆柱销与主动带轮212固接;所述驱动部分21中驱动轴支撑轴承216安装于驱动部分固定支架217上,所述驱动轴支撑轴承216对驱动轮轴215起到支撑作用;所述驱动部分21中从动带轮214通过销钉固接于驱动轮轴215上;所述驱动轴支撑轴承216与驱动轮轴215的轴向位置通过轴用挡圈约束;所述驱动部分21中驱动永磁轮218与驱动轮轴215通过键连接的方式进行周向约束,通过轴用挡圈和驱动轮轴215上的轴肩进行轴向约束;所述驱动部分21中的直流减速电机211的动力通过主动带轮212、同步带213、从动带轮214、驱动轮轴215传递到驱动永磁轮218;
13、所述从动部分22中双轴承t型轴承座221对从动轮轴222起到支撑作用;所述从动部分22中双轴承t型轴承座221与从动轮轴222对的轴向位置通过轴用挡圈进行约束;
14、所述辅助支撑装置3中橡胶支撑轮32内层为带有螺杆的轴承,外层为橡胶轮胎;所述辅助支撑装置3中支撑支架31与橡胶支撑轮32通过螺栓连接方式固接;所述支撑支架31通过螺帽和螺栓固接于机器人机身1下端的2020型铝合金型材16、1020型铝合金型材17上;
15、所述螺栓检测装置4中检测设备41通过螺栓连接方式固接于机器人机身1的第一铝合金板11上;
16、所述螺栓识别组件42中螺栓识别传感器422固接于螺栓识别传感器固定支架421上;所述螺栓识别传感器固定支架421另一端通过螺栓连接方式固接于第一铝合金板11上;
17、所述探头执行组件43中直线电机模组431与电机模组支架432通过螺栓连接方式固接;所述执行组件支架433通过螺栓连接方式固接于直线电机模组431的滑块上;所述执行组件支架433安装有两个直线轴承434;所述导向轴435安装于两个直线轴承434上,并通过直线轴承434进行自由度约束;所述导向轴435下端安装探头夹具437,上端安装有螺母进行限位;所述导向轴435与探头夹具437之间安装有复位弹簧436;所述探头夹具437通过螺栓固定检测探头438。
18、优选地,所述机器人机身1中,第一铝合金板11的数量为1个,驱动部分铝合金固定板12的数量为1个,从动部分铝合金固定板13的数量为2个;2020型铝合金型材16数量为8个,其中连接驱动部分铝合金固定板12的数量为6个,连接铝合金拉手18的数量为1个,连接从动部分铝合金固定板13的数量为1个;1020型铝合金型材17数量为7个,连接2个从动部分铝合金固定板13。
19、优选地,所述吸附移动装置2中从动部分22通过螺栓连接固接于机器人机身1的从动部分铝合金固定板13上;吸附移动装置2中驱动部分21通过螺栓连接固接于机器人机身1的驱动部分铝合金固定板12上。
20、优选地,所述检测设备41为超声检测仪器,通过有线连接方式与检测探头438连接。
21、优选地,所述螺栓识别传感器422在螺栓识别传感器固定支架421上的位置可以通过螺栓识别传感器固定支架421上的传感器安装槽调节;所述直线电机模组431在电机模组支架432上的位置可以通过直线电机模组安装槽调节。
22、优选地,所述辅助支撑装置3中支撑支架31上设有两个槽口,槽口分别位于螺栓识别组件42和探头执行组件43下方位置。
23、优选地,所述驱动永磁轮218和从动永磁轮223为同一种永磁轮,数量各为2个。
24、与现有技术相比,本实用新型的有益效果在于:
25、本实用新型的一种风力发电机塔筒法兰连接螺栓检测机器人,机器人通过吸附移动装置中的驱动永磁轮和从动永磁轮稳定吸附于风力发电机塔筒上法兰侧表面;辅助支撑装置的橡胶支撑轮作用于上法兰上表面,负责支撑机器人重力;机器人通过吸附移动装置的驱动部分的直流减速电机提供机器人运动动力,通过同步带传动方式传递给驱动永磁轮,实现机器人沿塔筒法兰一周移动;移动过程中,机器人通过螺栓识别组件中的螺栓识别传感器识别螺栓位置,并完成螺栓定位;螺栓定位后,机器人通过探头执行组件完成连接螺栓的裂纹无损检测作业。
- 还没有人留言评论。精彩留言会获得点赞!