一种变电站远程智能巡视机器人的制作方法
本技术属于变电站巡视,涉及一种变电站远程智能巡视机器人。
背景技术:
1、我国变电站内的电力设备状态主要通过数据上传到后台进行监控,依靠人工巡视辅助确认。然而人工巡视现场电力设备,可通过红外测温仪等辅助性工具检查设备有无异常,人耳判断设备有无异常声响,人眼观察核对设备实际位置、保护压板投退位置、运行装置异常信号灯等,具有不可替代的优势。然而人工巡视虽具有可靠性,还存在一些问题:
2、人工巡视变电站工作需要在路途上花费大量的时间,甚至超过变电站内的巡视工作时间,使巡视工作效率低下;无法及时查看站内设备状态和异常信号情况,降低了处理设备故障和异常信号的效率;存在错判漏看的情况。
3、而现有的机器人行走越障能力弱,对于异常信号情况的判别效果也较差。因此,我们提出一种变电站远程智能巡视机器人,可实现三轮行走履带组件和二轮行走履带组件差速移动,具备良好的行走越障功能,主摄像头和侧摄像头组件可调节任意位置和角度,主摄像头、侧摄像头组件和热成像摄像头以及监测无人机配合,实时监测变电站,同时侧摄像头组件可实现多角度微调和镜头旋转,保证拍摄更加准确。
技术实现思路
1、本实用新型的目的是针对现有的技术存在上述问题,提出了一种变电站远程智能巡视机器人,该实用新型要解决的技术问题是:如何实现稳定差速移动,具备良好的行走越障功能,同时主摄像头和热成像摄像头以及侧摄像头可调节任意位置和角度,主摄像头、侧摄像头组件和热成像摄像头以及监测无人机配合,实时准确地监测变电站。
2、本实用新型的目的可通过下列技术方案来实现:
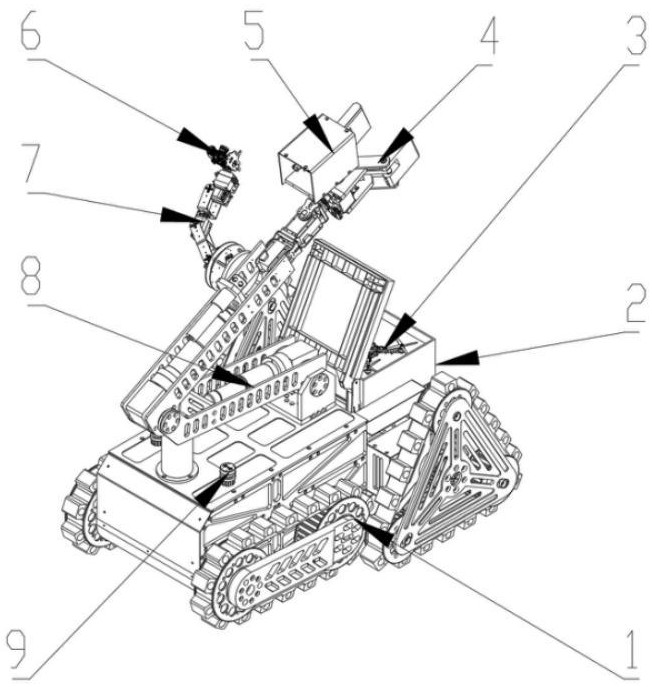
3、一种变电站远程智能巡视机器人,包括越障行走组件,所述越障行走组件的上端设有无人机箱和主机械臂,无人机箱的内部放置有监测无人机,主机械臂的侧部设有侧机械臂,侧机械臂的端部设有侧摄像头组件,主机械臂的端部设有机械夹爪组件,机械夹爪组件上设有主摄像头,越障行走组件内部设有主控板、卫星通信模块、gps定位模块、蓄电池和wifi通讯模块,主控板分别与侧摄像头组件、主摄像头、卫星通信模块、gps定位模块、蓄电池以及wifi通讯模块电性连接,监测无人机与wifi通讯模块电性连接。
4、本实用新型的工作原理:越障行走组件可带着本装置行走,具有良好的越障行走功能,主机械臂带动机械夹爪组件移动,即带动主摄像头移动,保证主摄像头可调节任意位置和角度,侧机械臂带动侧摄像头组件移动,保证侧摄像头组件可调节任意位置和角度,侧摄像头组件和主摄像头配合,实时巡视变电站,并将巡视的图像等信息,通过卫星通信模块远程传输至电网主站,并能实时将自身的位置信息,通过gps定位模块远程传输至电网主站,当变电站发生异常情况时(异常情况如火灾、烟雾、动物等),越障行走组件会发出警示信息至电网主站,如发生异常情况的位置较远较高时,无人机箱会打开,电网主站工作人员通过卫星通信模块将控制信息传递至主控板,主控板将控制信息传递至wifi通讯模块,wifi通讯模块控制监测无人机,可远程控制监测无人机,监测无人机实时监测发生异常情况的位置,并将该位置信息和拍摄信息实时传输至电网主站,电网主站及时做出处理方案。
5、所述越障行走组件包括行走基座主体,主控板、卫星通信模块、gps定位模块、蓄电池和wifi通讯模块均设置在行走基座主体的内部,行走基座主体的上端设有闪光蜂鸣器,行走基座主体的外部设有若干雷达传感器,行走基座主体的前侧转动设有两个对称的主动轴,行走基座主体的内部设有两个对称的主动电机和两个对称的自动变速器,两个主动电机与同侧的主动轴之间设有主轴齿轮副,两个自动变速器与同侧的主动轴之间设有变速齿轮副,主动轴的外端连接有三轮行走履带组件,主动轴的内端固定有主动链轮,行走基座主体的后侧转动设有两个对称的从动轴,两个从动轴之间设有后联差速器,从动轴的外端均设有二轮行走履带组件,从动轴上均固定有从动链轮,行走基座主体内部均固定有若干对称设置的张紧轮,主动链轮与同侧的张紧轮以及从动链轮之间设有传动链,闪光蜂鸣器、雷达传感器、主动电机、自动变速器以及后联差速器均与主控板电性连接。
6、采用以上结构,雷达传感器监测到行走障碍时,将障碍信息传递至主控板,主控板控制行走避障,主动电机通过主轴齿轮副带动同侧的主动轴转动,从而带动三轮行走履带组件进行行走,两个自动变速器与同侧的主动轴之间设有变速齿轮副,使得两个三轮行走履带组件进行差速行走,主动轴带动主动链轮转动,主动链轮与同侧的张紧轮以及从动链轮之间设有传动链,带动同侧从动轴转动,从动轴带动二轮行走履带组件行走,两个从动轴之间设有后联差速器,主控板控制后联差速器带动两个从动轴的转速不同步,从而使得两个二轮行走履带组件差速行走,可进行直行、转弯、转向等工作,当变电站发生异常情况时,异常信息传递至主控板,主控板控制闪光蜂鸣器会发出闪光蜂鸣警示信息。
7、所述三轮行走履带组件包括两个对称设置的三轮支架,一侧的三轮支架固定在行走基座主体上,两个三轮支架之间转动设有三个三角分布的第一行走轮,其中一个第一行走轮与同侧的主动轴之间设有传递链轮副,三个第一行走轮上设有三轮行走履带。
8、采用以上结构,主动轴通过传递链轮副带动同侧的三轮行走履带组件的其中一个第一行走轮转动,三个第一行走轮上设有三轮行走履带,带动三轮行走履带进行行走。
9、所述二轮行走履带组件包括两个对称设置的二轮支架,一侧的二轮支架固定在行走基座主体上,两个二轮支架之间转动设有两个水平设置的第二行走轮,其中一个第二行走轮与同侧的从动轴之间传递连接,两个第二行走轮上设有二轮行走履带。
10、采用以上结构,从动轴带动同侧的二轮行走履带组件包的其中一个第二行走轮转动,两个第二行走轮上设有二轮行走履带,带动二轮行走履带进行行走。
11、所述无人机箱包括无人机箱体,无人机箱体固定在行走基座主体上,无人机箱体的上端铰接有无人机箱盖,无人机箱盖与无人机箱体之间铰接有两个对称设置的电机推杆,电机推杆与主控板电性连接。
12、采用以上结构,主控板控制两个对称设置的电机推杆同步升起,带动无人机箱盖打开,便于监测无人机飞出无人机箱体,两个对称设置的电机推杆同步收起,带动无人机箱盖关闭。
13、所述主机械臂包括主机械臂主体,主机械臂主体固定在行走基座主体上,主机械臂主体的末端设有微调摆位臂,机械夹爪组件设置在微调摆位臂的端部,主机械臂主体、微调摆位臂均与主控板电性连接。
14、采用以上结构,主控板控制主机械臂主体带动微调摆位臂移动,微调摆位臂带动机械夹爪组件移动,便于带动主摄像头盒体移动任意角度和位置。
15、所述机械夹爪组件包括u型支架,u型支架转动设置在微调摆位臂的端部,u型支架上固定有转动电机和夹爪电机,转动电机的输出轴与微调摆位臂之间设置转动齿轮副,u型支架上铰接有铰合夹爪,夹爪电机的输出轴与铰合夹爪之间设有夹爪齿轮副,u型支架上固定有主摄像头盒体,主摄像头固定在主摄像头盒体内部,主摄像头盒体内部还设有热成像摄像头,转动电机、夹爪电机以及热成像摄像头均与主控板电性连接。
16、采用以上结构,主控板控制转动电机的输出轴与微调摆位臂之间设置转动齿轮副,从而带动u型支架在微调摆位臂的端部转动,夹爪电机的输出轴通过夹爪齿轮副带动铰合夹爪张合,从而实现铰合夹爪夹持物品,实现夹持功能,主摄像头和热成像摄像头配合,实时监测变电站,热成像摄像头进行热源温度检测,实时将温度信息传递至主控板,主摄像头进行摄像或拍摄,实时将图像信息传递至主控板,主控板将图像信息和热源温度传递至电网主站,电网主站及时做出处理方案。
17、所述侧机械臂包括侧机械臂主体,侧机械臂主体固定在主机械臂主体的侧部,侧机械臂主体的末端固定有旋位电机,旋位电机的输出轴上设有固定板,侧摄像头组件设置在固定板上,旋位电机与主控板电性连接。
18、采用以上结构,侧机械臂主体带动旋位电机移动,旋位电机的输出轴带动固定板转动,从而带动侧摄像头组件移动任意角度和位置。
19、所述侧摄像头组件包括安装座板,安装座板固定在固定板上,固定板上转动设有u型旋位架,固定板与u型旋位架之间设有转动轴,u型旋位架上固定有旋转电机一和旋转电机三,旋转电机一的输出轴与转动轴之间设有旋转皮带轮副一,u型旋位架上转动设有圆盘旋位架,圆盘旋位架的转轴与旋转电机三的输出轴之间设有旋转皮带轮副三,圆盘旋位架上固定有旋转电机二,圆盘旋位架的内部转动设有摄像头架,摄像头架与旋转电机二的输出轴之间设有旋转皮带轮副二,摄像头架上固定有侧摄像头,主摄像头和侧摄像头均为可自动调焦摄像头,侧摄像头、旋转电机一、旋转电机二和旋转电机三均与主控板电性连接。
20、采用以上结构,旋转电机一的输出轴通过旋转皮带轮副一带动转动轴转动,从而带动u型旋位架水平转动,微调水平拍摄角度,旋转电机三的输出轴通过有旋转皮带轮副三带动圆盘旋位架在u型旋位架上转动,微调俯仰拍摄角度,旋转电机二的输出轴通过旋转皮带轮副二带动摄像头架在圆盘旋位架内部转动,调节侧摄像头的镜头转动,实现微调准确定位。
21、与现有技术相比,本变电站远程智能巡视机器人具有以下优点:越障行走组件通过两个主动电机和自动变速器分别与三轮行走履带组件配合,实现三轮行走履带组件差速移动,从动轴、后联差速器与二轮行走履带组件配合,实现二轮行走履带组件差速移动,具备良好的行走越障功能;
22、主机械臂带动机械夹爪组件移动,即带动主摄像头移动,保证主摄像头可调节任意位置和角度,主摄像头和热成像摄像头配合,实时监测变电站,同时机械夹爪组件具备夹持功能;
23、通过侧机械臂带动侧摄像头组件移动,保证侧摄像头组件可调节任意位置和角度,同时侧摄像头组件可实现多角度微调和镜头旋转,保证拍摄更加准确;
24、通过无人机箱和监测无人机配合,实现放置监测无人机,电网主站工作人员通过卫星通信模块将控制信息传递至主控板,主控板将控制信息传递至wifi通讯模块,wifi通讯模块控制监测无人机,可远程控制监测无人机,监测无人机实时监测发生异常情况的位置,并将该位置信息和拍摄信息实时传输至电网主站。
- 还没有人留言评论。精彩留言会获得点赞!