一种用于塑胶箱的快换夹具的制作方法
本技术涉及运输物料,特别涉及一种用于塑胶箱的快换夹具。
背景技术:
1、目前,在自动化搬运系统中,塑胶箱的快速装卸是一个重要的环节。然而,现有的夹具往往缺乏灵活性,不能适应不同形状和尺寸的塑胶箱,且装卸效率不高。例如,仓库接收供应商塑胶箱包装的产品时,由多个人工将塑胶箱放置到输送线上;人工频繁搬运弯腰作业负重大强度高且易疲劳,幸福指数低,员工流失率高。
技术实现思路
1、针对上述问题,本技术实施例的目的在于提供一种用于塑胶箱的快换夹具,用于解决人工搬运塑胶箱劳动强度大的问题。
2、本技术实施例的目的在于提供一种用于塑胶箱的快换夹具,包括:
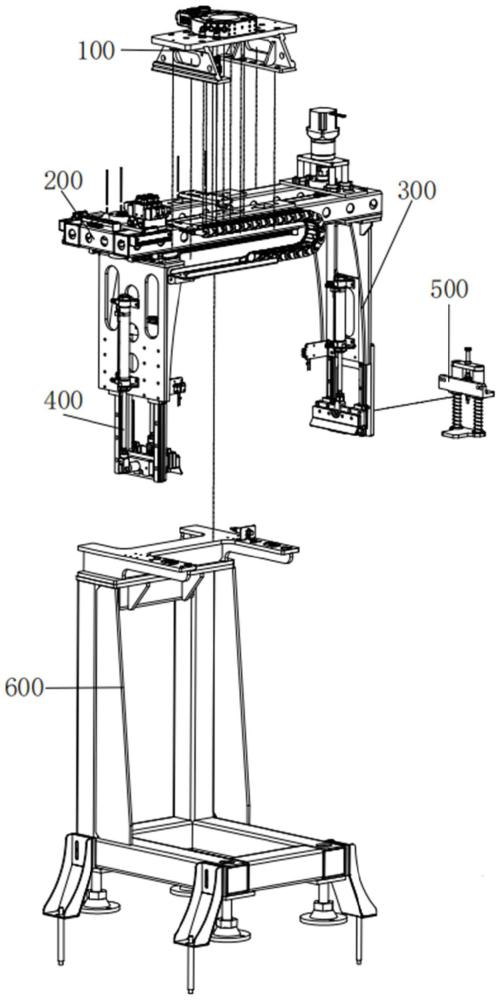
3、机器人快换组件,其与机器人公头连接;
4、移动臂驱动组件,其包括与所述机器人快换组件连接的焊接架体,所述焊接架体上设有动力组件;
5、固定臂组件,其与所述焊接架体连接,并位于所述焊接架体的一端;
6、其中,所述固定臂组件包括第一水平块,用于连接塑胶箱的扣手平面以托起塑胶箱,还包括可移动的第一斜压板,用于压紧所述塑胶箱;
7、移动臂组件,其与所述动力组件连接,并位于所述焊接架体的另一端,以在所述动力组件的驱动下沿靠近或者远离所述固定臂组件的方向移动;
8、其中,所述移动臂组件包括第二水平块,用于连接塑胶箱的扣手平面以托起塑胶箱,还包括可移动的第二斜压板,用于压紧所述塑胶箱;
9、检测组件,其与所述固定臂组件和/或所述移动臂组件分别连接,并与塑胶箱接触,用于检测塑胶箱的位置,以使所述固定臂组件和所述移动臂组件夹持塑胶箱;
10、夹具放置组件,其设于所述焊接架体一侧,用于放置所述移动臂驱动组件。
11、作为一可选实施例,所述机器人快换组件包括:
12、快换母头,用于与机器人公头连接;
13、气动元件,其与所述快换母头连接,用于驱动所述快换母头动作;
14、分气接头,其与所述气动元件连接,用于驱动所述气动元件动作;
15、快换固定板,其用于安装所述快换母头和所述分气接头;
16、快换立板,其分别设于所述快换固定板的两端,并与所述焊接架体连接;
17、定位柱,其设于所述快换固定板的一端,并位于所述快换立板的外侧,用于确定所述机器人快换组件与机器人的装配位置;
18、集气接头,其设于所述快换立板上,并与所述分气接头连接,其另一端与气源连接。
19、作为一可选实施例,所述动力组件包括:
20、电机安装板,其与所述焊接架体连接,所述电机安装板上设有电机安装架;
21、电机,其设于所述电机安装架上,所述电机的输出轴一端连接有联轴器;
22、轴承座,其设于所述电机安装板上;
23、同步轮,其设于所述电机安装板另一侧,所述同步轮的轮轴贯穿所述轴承座并与所述联轴器连接,所述焊接架体的另一端设有同样的同步轮;
24、同步带,其设于两个所述同步轮的外侧并与所述同步轮啮合,所述同步带上设有夹板。
25、作为一可选实施例,所述动力组件还包括:
26、惰轮固定板,其与所述焊接架体连接;
27、惰轮,其通过自身的轮轴与所述惰轮固定板连接,并且其外壁与所述同步带接触。
28、作为一可选实施例,所述移动臂驱动组件还包括:
29、电磁阀组,其与所述焊接架体连接,用于给所述第一斜压板、第二水平块和第二斜压板的移动提供气源;
30、拖链,其一端通过拖链固定板与所述焊接架体连接,其另一端设于与所述移动臂组件连接的拖链槽内;
31、第一线轨,其设于所述焊接架体,在所述同步带通过夹板带动所述移动臂组件移动时使所述移动臂组件沿所述第一线轨移动。
32、作为一可选实施例,所述固定臂组件还包括:
33、第一固定臂,其与所述焊接架体连接;
34、第二固定臂,其与所述第一固定臂连接,所述第二固定臂一端设有第一水平块;
35、第一压缸,其设于所述第二固定臂的另一端,所述第一压缸的活动端上设有第一斜压板,所述第一斜压板与所述第一水平块配合用于夹持塑胶箱;
36、传感器安装板,其设于所述第二固定臂上,所述传感器安装板上设有第一传感器,用于检测有无所述塑胶箱;
37、第二线轨,其设于所述第二固定臂上,所述第一压缸的伸缩端移动时带动所述第一斜压板沿所述第二线轨移动。
38、作为一可选实施例,所述移动臂组件还包括:
39、第一移动臂,其与所述夹板连接,所述第一移动臂上设有第一气缸;
40、第二移动臂,其通过所述第一气缸的活动端与所述第一移动臂连接,所述第二移动臂上设有第二水平块;
41、传感器安装板,其设于所述第二移动臂上,所述传感器安装板上设有第二传感器,用于检测有无所述塑胶箱;
42、第二压缸,其设于所述第二移动臂上,所述第二压缸的活动端上设有第二斜压板,所述第二斜压板与所述第二水平块配合用于夹持塑胶箱。
43、作为一可选实施例,所述移动臂组件还包括:
44、第三线轨,其设于所述第一移动臂上,以在所述第一气缸带动所述第二移动臂移动时使所述第二移动臂沿所述第三线轨移动;
45、第四线轨,其设于所述第二移动臂上,所述第二压缸的伸缩端移动时带动所述第二斜压板沿所述第四线轨移动。
46、作为一可选实施例,所述检测组件包括:
47、l型板,其与所述第二固定臂连接,所述l型板上设有直线轴承;
48、第三斜压板,其与所述直线轴承连接,用于安装可移动的第三传感器;
49、导向轴,其一端与所述直线轴承连接,另一端与探板连接,所述l型板与所述探板之间设有套设在所述导向轴上的弹簧;
50、螺栓,其一端贯穿所述第三斜压板,并与所述第三传感器连接;
51、螺母,其与所述螺栓连接,并位于所述第三斜压板远离所述第三传感器的一侧。
52、作为一可选实施例,所述夹具放置组件包括:
53、焊接架,其一侧通过斜撑和膨胀螺丝设置在安装面上;
54、u型架,其一侧与所述焊接架的另一侧连接,另一侧与所述焊接架体连接,用于放置所述移动臂驱动组件;
55、其中,所述u型架上设有第四传感器,用于检测有无所述移动臂驱动组件,所述u型架上还设有导套,用于与所述焊接架体配合,以确定所述移动臂驱动组件的放置位置。
56、本技术实施例的有益效果在于:
57、本技术结构设计合理,通过机器人快换组件实现与机器人公头连接,实现机器人多种夹具的自由切换;通过移动臂组件和固定臂组件的配合,托起塑胶箱的平扣手并进行稳定的搬运,可兼容的塑胶箱尺寸范围大,实现对塑胶箱的托起、避让、压紧、检测等功能;通过检测组件实现防止视觉系统引导的抓取位置偏移,避免撞机现象的发生。本发明代替人工频繁搬运,提高人工工作效率,提高人工幸福指数,适用于仓储、物流、食品制造、汽车零部件制造等领域。
- 还没有人留言评论。精彩留言会获得点赞!