机器人的制作方法
本技术涉及机器人,具体而言,涉及一种机器人。
背景技术:
1、目前,新能源汽车在市场中的占比越来越高,在日常使用过程中需要用户手动将充电桩的充电枪取下并插入到汽车的充电口处,操作较为繁琐,相关技术中,虽然存在多自由度机械臂的充电机器人,但其结构较为复杂,应用成本较高。
技术实现思路
1、本实用新型旨在至少解决现有技术或相关技术中存在的技术问题之一。
2、有鉴于此,本实用新型的实施例提供了一种机器人。
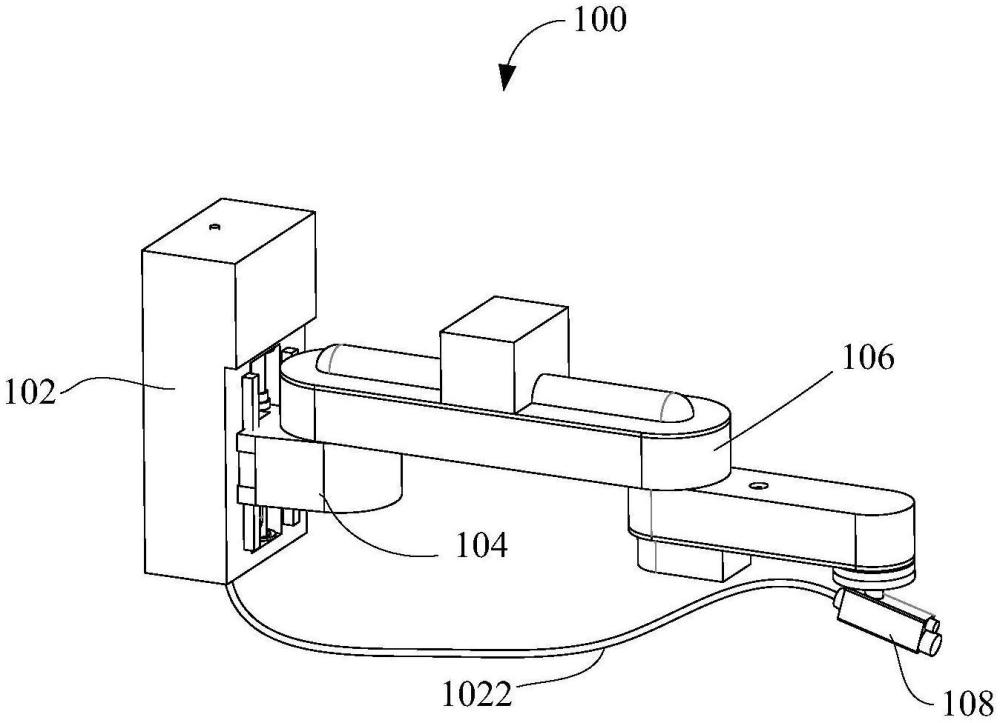
3、为了实现上述目的,本实用新型的实施例提供了一种机器人,包括:基座,基座内设有充电线;第一臂,与基座传动连接,第一臂可相对于基座做直线运动;至少一个第二臂,至少一个第二臂与第一臂传动连接,第二臂可相对于第一臂转动,至少一个第二臂远离第一臂的一端设有与第二臂转动连接的充电枪,充电线的另一端连接至充电枪;其中,第二臂内设有多个传动连接的同步结构,第二臂的旋转轴的轴线方向与第一臂的移动方向相平行。
4、本实用新型提出的机器人,包括基座、第一臂和一个或多个第二臂,基座内设有充电线,通过控制第一臂和第二臂的转动,可实现对第二臂尾端的充电枪的姿态调整,从而实现对待充电目标的充电插入,进而实现供电,例如针对电动汽车,通过本技术提供的机器人,机器人可以带着充电枪去对接电动车的充电口进行充电。具体地,基座的位置决定整个机器人的位置,第一臂和第二臂均直接或间接的连接到基座上,其位置随基座的位置而移动,基座自身可以为固定在地面上,或者可以在地面上滑动,基座主要为整个机器人结构提供整体的支撑,从而保持稳定,需要说明的是,基座上设有充电线,用于连接电源,从而确保能够为电动车充电。充电线起始于基座,并贯穿整个机器人结构,最终连接至充电枪。第一臂与基座传动连接,通过限制第一臂可相对于基座做直线运动,从而可调整第一臂相对于基座的高低位置,即在第一臂的作用下可调整充电枪相对于基座的高度,以便于对准不同高度的充电口。与基座传动连接,允许机器人在直线方向上移动,以调整充电枪的插入位置。此外,第二臂与第一臂传动连接,允许机器人在垂直于第一臂移动方向的平面内转动,以调整充电枪的对准角度。通过将充电枪安装在至少一个第二臂的远离第一臂的一端,用于与电动车的充电口对接。
5、需要补充的是,基座与第一臂通过传动机构(可能包括电机、丝杆、导轨等)连接,实现第一臂的直线运动。第一臂与第二臂通过传动机构(可能包括电机、同步带轮等)连接,实现第二臂的旋转运动。第二臂与充电枪传动连接,使充电枪能够随着第二臂的旋转而旋转,以实现精确对准。
6、需要强调的是,第二臂的旋转轴的轴线方向与第一臂的移动方向相平行,第二臂的旋转不会影响第一臂的直线运动,两者可以独立控制,提高机器人的灵活性和定位精度。
7、其中,充电线基座延伸至充电枪,提供必要的电源连接,使充电枪能够为电动车充电,直线运动第一臂的直线运动能力允许机器人接近或远离电动车,适应不同车型和充电口位置。第二臂的旋转能力允许机器人调整充电枪的方向,以对准电动车的充电口。相比于利用关节式机械臂的结构,本方案仅通过第一臂的直线运动和第二臂的旋转运动,可利用更低的成本满足低速低刚性需求,进而使得充电枪能够精确地定位到电动车的充电口,实现自动充电。
8、整体来看,这种设计通过结合直线运动和旋转运动,提供了一种灵活、精确的充电解决方案,适合于不同位置和角度的充电需求,有助于提高充电效率和用户体验。
9、在一些技术方案中,可选地,第二臂的数量为两个,其中一个第二臂与第一臂传动连接,两个第二臂传动连接,且其中一个第二臂可相对于另一个第二臂转动,另一个第二臂远离第一臂的一端设有充电枪。
10、在该技术方案中,通过设置两个转动的第二臂,可分别与第一臂和彼此传动连接,允许机器人在多个方向上进行调整。进一步地,一个第二臂与第一臂连接,提供基础的旋转能力,另一个第二臂与前一个第二臂连接,提供额外的旋转自由度。通过将充电枪安装在远离第一臂的一端的第二臂上,用于与电动车的充电口对接。
11、第二个第二臂与第一个第二臂连接,形成串联的旋转结构,允许更精细的角度调整。通过两个第二臂的连接,形成一个可以相对旋转的系统,增加了机器人的灵活性和调整范围。
12、可以理解,通过增加第二臂的数量和旋转能力,提供了更高的灵活性和精确度,使机器人能够适应各种充电场景,提高充电效率和用户体验。
13、在一些技术方案中,可选地,两个第二臂中的第一个相对于第一臂转动的旋转轴为第一轴,第二个第二臂相对于第一个第二臂转动的旋转轴为第二轴;其中,用于驱动第一个第二臂绕第一轴旋转的多个同步结构,以及用于驱动第二个第二臂绕第二轴旋转的多个同步结构设于一个第一壳体内。
14、在该技术方案中,两个第二臂的旋转轴分别为第一轴和第二轴,其中第一轴为与第一臂相连的第二臂的旋转轴,第二轴则为另一个设置充电枪的第二臂的旋转轴。在此基础上,本方案提供了用于驱动两个第二臂分别绕第一轴和第二轴旋转的结构,即多个同步结构,同时限制用于驱动两个第二臂旋转的结构设置在同一个壳体内,即多个同步结构设置在第一壳体内,一方面在安装或检修时,同步结构的设置更为集中,更便于操作,另一方面,也减少了空间占用,简化布线和维护工作。
15、此外,对于第一壳体而言,其作为集成的外壳结构,用于容纳驱动两个第二臂转动的所有同步结构,即用于驱动第一个第二臂绕第一轴旋转的多个同步结构可认为是一组,用于驱动第二个第二臂绕第二轴旋转的多个同步结构可认为是另一组,通过限制两组同步结构均设置在同一壳体内,有助于集中管理和保护内部的传动部件。
16、进一步地,第一壳体可以作为一个模块化单元,便于快速更换或升级,提高机器人的灵活性和可维护性。
17、在一些技术方案中,可选地,第二个第二臂转动至缩回位置,在旋转轴的切平面上,第二个第二臂的第二壳体的投影位于第一壳体的投影内。
18、在该技术方案中,第二个第二臂为与第一个第二臂相连的机械臂结构,可绕第二轴旋转,第二壳体则用于容纳驱动第二个第二臂旋转的多个同步结构的外壳,第二个第二臂在不使用时或需要最小化占用空间时的位置,此时会将其折叠或旋转到一个紧凑的状态。
19、其中,旋转轴的切平面指的是通过第二轴的一个假想平面,该平面与旋转轴垂直。当第二个第二臂转动至缩回位置时,第二壳体在旋转轴的切平面上的投影位于第一壳体的投影内,可使得第二壳体在缩回时部分或完全隐藏在第一壳体内,这种设计有助于最小化机器人在非工作状态下的占用空间。
20、可以理解,通过将第二壳体设计为能够在缩回位置时位于第一壳体投影内,机器人在非工作状态下更加紧凑,节省空间。当然,缩回位置的设计使得机器人在不使用时更加整洁,提高了其在固定充电站或移动充电车中的美观性。
21、其中,即使在缩回位置,机器人仍能保持必要的灵活性,以便在需要时快速展开并执行充电任务。
22、这种设计通过巧妙地安排第二个第二臂和第二壳体的位置关系,在保证机器人功能性的同时,也考虑到了空间利用、美观性、安全性和维护便利性。
23、在一些技术方案中,可选地,还包括:第一轴和第二轴分别位于第一壳体的相对的两端。
24、在该技术方案中,通过将第一轴和第二轴设置在第一壳体的两端,有助于保持机器人的平衡,也有助于优化空间使用,使得第一壳体内部的组件分布更加均匀,减少相互干扰。可以理解,每个轴的组件都位于易于访问的位置,两端布局的设计使得对同步结构的检查和维护工作更加方便。
25、由于每个轴的同步结构可以独立控制,从而可通过对两端的同步结构进行控制,提高机器人的动态响应能力,实现快速而精确的运动。
26、在一些技术方案中,可选地,充电枪相对于第二个第二臂转动的旋转轴为第三轴,用于驱动充电枪绕第三轴转动的多个同步结构位于第二个第二臂的第二壳体内。
27、在该技术方案中,第二壳体用于容纳驱动充电枪绕第三轴旋转所涉及到的多个的同步结构,具体可包括电机、同步带轮、同步带等组件,负责驱动充电枪的旋转运动。充电枪装在第二个第二臂的末端,绕第三轴旋转,以实现与电动车充电口的精确对接。
28、可以理解,将同步结构置于第二壳体内,可以提供更精细的控制,确保充电枪能够精确地对准电动车的充电口。第二壳体可以作为一个模块化单元,便于维护和升级。第二壳体为同步结构提供了物理保护,防止灰尘和异物的侵入,延长设备寿命。
29、需要补充的是,第二壳体位于第二个第二臂的末端,紧邻充电枪,使得同步结构与充电枪的连接更加直接和紧凑。
30、在一些技术方案中,可选地,第二臂的数量为多个,多个第二臂的旋转轴的轴线方向相互平行。
31、在该技术方案中,通过设置多个第二臂,并限制旋转轴均平行,使得在多个第二臂的作用下,实现更多的运动方向,使机器人能够从不同角度接近并对接电动车的充电口。此外,由于多个第二臂的旋转轴均平行,多个第二臂的姿态是相似的,一方面可使得整个结构保持一致的运动控制以及同步性,另一方面有助于优化空间利用,使得机器人在非工作状态下更加紧凑。
32、在一些技术方案中,可选地,还包括:丝杆,设于基座上,丝杆上设有螺纹连接的螺母,螺母与第一臂传动连接以实现基座和第一臂的丝杆传动;第一电机,与丝杆传动连接,第一电机用于驱动丝杆转动。
33、在该技术方案中,对于基座和第一臂之间的相互运动主要是通过丝杆传动实现的,具体地,丝杆设于基座上,其表面设有螺旋状的螺纹。螺母与丝杆之间进行螺纹连接,可以在丝杆上直线移动。当丝杆转动时,螺母沿丝杆的轴向移动,从而带动第一臂实现直线运动。此外,还设有第一电机,其作为动力源,与丝杆传动连接,用于驱动丝杆转动。电机的旋转运动通过丝杆机构可转换为螺母的直线运动。
34、可以理解,丝杆和螺母的组合允许在较小的空间内实现直线运动,有助于机器人的紧凑设计。
35、在一些技术方案中,可选地,基座设有导轨,第一臂设有与导轨滑动连接的导块,通过导轨和导块的配合以实现第一臂与基座的相对直线移动。
36、在该技术方案中,通过设置导轨和导块,可辅助第一臂实现升降,具体地,导轨安装在基座上,作为第一臂的直线运动的导向。导轨提供了稳定的滑动路径,确保第一臂沿预定方向移动。导块安装在第一臂上,与导轨相匹配。导块在导轨上滑动,导轨和导块的配合确保了第一臂的平稳和精确移动,减少了摩擦和磨损。
37、可以理解,导轨提供了稳定的支撑,使得第一臂在移动过程中保持稳定,减少了振动和偏移。
38、需要强调的是,本方案对于第一臂和基座之间,在丝杆螺母传动的基础上,额外增加了导轨导块结构,可增强整个结构的稳定性,极大地提高了第一臂与基座之间的连接强度,减少由于第二臂伸出后,在杠杆原理的作用下是的对第一臂和基座之间的连接处产生更大的作用力,导致在连接处附近断裂的可能。
39、可以理解,导轨设计允许第一臂在不同负载下进行稳定运动,提高了机器人的适应性。
40、通过在基座上设置导轨,并在第一臂上设置与之滑动连接的导块,机器人的设计实现了第一臂与基座之间的相对直线移动。这种设计不仅提供了精确的直线运动控制,还确保了运动的稳定性和耐磨性,同时便于维护和适应不同负载条件。
41、在一些技术方案中,可选地,同步结构具体包括:第二电机;多个同步轮,多个同步轮中的一个与第二电机传动连接,多个同步轮之间通过同步带相连,多个同步轮的转轴相互平行且处于同一平面上,其中,至少一个同步轮的轴线处设有用于供电线穿过的通孔。
42、在该技术方案中,同步结构包括第二电机、多个同步轮以及同步带,其中,第二电机作为同步结构的动力源,负责驱动整个同步轮系统旋转。多个同步轮与第二电机直接或通过同步带传动连接,确保同步运动。同步带用于连接各个同步轮,传递电机的动力,所有同步轮的转轴相互平行且处于同一平面上,从而提高同步轮系统的同步性和稳定性。需要强调地,通过在至少一个同步轮的轴线处设有通孔,允许供电线穿过,保证电机在机器人运动过程中的持续供电,特别是可以减少在转动过程对线缆的扭转损伤。
43、同步结构的设计通过第二电机和多个通过同步带相连的同步轮,实现了对机器人第二臂或充电枪的精确控制和同步运动。通孔的设计确保了电机的持续供电,而同步轮的布局则提高了运动的同步性和稳定性。
44、本实用新型的附加方面和优点将在下面的描述部分中变得明显,或通过本实用新型的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!