一种三自由度并联机器人控制参数调节方法及系统
本发明涉及并联机器人控制,尤其涉及一种三自由度并联机器人控制参数调节方法及系统。
背景技术:
1、并联机器人因其高刚度、高承载能力、高速度和高精度等优点,在工业自动化领域得到了广泛应用,尤其是在需要高速、高精度操作的场合,如快速抓取、放置、装配等。三自由度并联机器人作为并联机器人的一种重要类型,因其结构紧凑、运动灵活,在精密操作和微操作领域具有独特的优势。在许多工业应用场景中,机械手需要在极短的时间内完成从一个位置到另一个位置的快速移动,并在目标位置精确地执行预定的操作。在高速运动过程中,由于惯性力、驱动力矩的突变、传动系统的间隙以及结构本身的弹性变形等因素的综合影响,夹紧器工作头往往会产生明显的振动。这种振动在机械手到达目标位置后并不会立即消失,而是会持续衰减一段时间,即残余振动。残余振动的存在使得夹紧器工作头在目标位置附近产生不必要的抖动,严重降低了定位精度,可能导致抓取失败或放置错误,影响产品质量和生产效率,甚至可能损坏工件或机械手自身。然而,传统的一种三自由度并联机器人控制参数调节方法主要为线性控制,例如pid控制,虽然可以实现基本的定位控制,但对于抑制残余振动效果有限,这是因为pid控制的参数通常是固定的,无法适应高速运动过程中的动态变化,当机器人进行快速动作时,系统动态特性会发生改变,固定的pid参数难以有效抑制残余振动。
技术实现思路
1、基于此,本发明提供一种三自由度并联机器人控制参数调节方法及系统,以解决至少一个上述技术问题。
2、为实现上述目的,一种三自由度并联机器人控制参数调节方法,包括以下步骤:
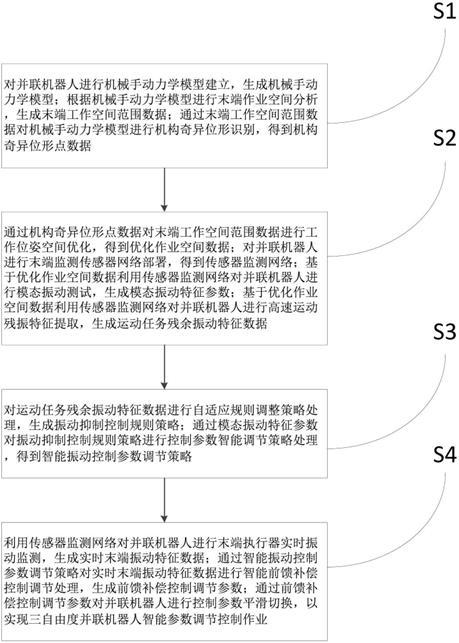
3、步骤s1:对并联机器人进行机械手动力学模型建立,生成机械手动力学模型;根据机械手动力学模型进行末端作业空间分析,生成末端工作空间范围数据;通过末端工作空间范围数据对机械手动力学模型进行机构奇异位形识别,得到机构奇异位形点数据;
4、步骤s2:通过机构奇异位形点数据对末端工作空间范围数据进行工作位姿空间优化,得到优化作业空间数据;对并联机器人进行末端监测传感器网络部署,得到传感器监测网络;基于优化作业空间数据利用传感器监测网络对并联机器人进行模态振动测试,生成模态振动特征参数;基于优化作业空间数据利用传感器监测网络对并联机器人进行高速运动残振特征提取,生成运动任务残余振动特征数据;
5、步骤s3:对运动任务残余振动特征数据进行自适应规则调整策略处理,生成振动抑制控制规则策略;通过模态振动特征参数对振动抑制控制规则策略进行控制参数智能调节策略处理,得到智能振动控制参数调节策略;
6、步骤s4:利用传感器监测网络对并联机器人进行末端执行器实时振动监测,生成实时末端振动特征数据;通过智能振动控制参数调节策略对实时末端振动特征数据进行智能前馈补偿控制调节处理,生成前馈补偿控制调节参数;通过前馈补偿控制调节参数对并联机器人进行控制参数平滑切换,以实现三自由度并联机器人智能参数调节控制作业。
7、本发明通过建立精确的机械手动力学模型并进行末端工作空间分析,可以准确识别机构奇异位形点,并据此优化工作位姿空间。这避免了机器人在奇异位形附近工作,从而有效防止了机器人在此区域内由于力矩剧增而导致的机械结构损坏和控制失效,提高了机器人的安全性和可靠性。传统的控制方法通常不考虑奇异位形的影响,容易导致机器人在奇异位形附近出现不可控的振动,甚至损坏机器人。而本方法通过预先识别和规避奇异位形,从根本上解决了这个问题。优化后的工作空间也使得机器人的运动更加平稳,减少了不必要的能量消耗。基于传感器监测网络的模态振动测试和高速运动残振特征提取,可以准确识别机器人的固有频率和振型,通过实际测量获得的模态振动特征参数,能够更精准地描述机器人的振动特性,从而实现更有效的振动抑制。同时,高速运动残振特征提取可以捕捉到机器人高速运动过程中特有的振动模式,为自适应规则调整策略提供输入,进一步提高了振动抑制的针对性和有效性。自适应规则根据运动任务残余振动特征数据进行调整,能够实时适应不同的运动轨迹和负载条件,确保振动抑制策略始终保持最优状态。而智能振动控制参数调节策略则利用模态振动特征参数对控制参数进行精细调节,进一步提高了振动抑制的精度。这种双重调节机制,相比于传统的固定参数pid控制,能够更好地应对高速运动过程中的动态变化,实现更快速、更精确的残余振动抑制。通过实时监测末端执行器的振动状态,可以及时捕捉到残余振动的发生,并通过前馈补偿控制调节生成相应的控制信号,对残余振动进行精确补偿。控制参数的平滑切换则保证了控制过程的稳定性和连续性,避免了由于参数突变引起的二次振动。这种前馈补偿控制策略,能够在残余振动发生之前就进行预测和补偿,从而最大程度地减少残余振动对定位精度的影响。因此,本发明的一种三自由度并联机器人控制参数调节方法通过实时监测末端执行器的振动状态,并进行前馈补偿控制调节,减少残余振动对定位精度的影响,提高机器人在高速作业时的稳定性和可靠性。
8、优选地,步骤s1包括以下步骤:
9、步骤s11:对并联机器人进行结构参数测量,得到并联机器人结构参数;
10、步骤s12:根据并联机器人结构参数进行关节摩擦力识别,生成关节摩擦力数据;
11、步骤s13:基于并联机器人结构参数以及关节摩擦力数据进行机械手动力学模型建立,生成机械手动力学模型;
12、步骤s14:根据机械手动力学模型进行末端作业空间分析,生成末端工作空间范围数据;
13、步骤s15:通过末端工作空间范围数据对机械手动力学模型进行机构奇异位形识别,得到机构奇异位形点数据。
14、本发明从并联机器人的结构参数测量入手,获取了精确的机器人几何尺寸信息。通过将关节摩擦力纳入动力学模型,可以更准确地预测机器人的运动轨迹和受力情况,从而提高控制系统的性能。结合精确的结构参数和关节摩擦力数据,建立了高精度的机械手动力学模型。该模型能够更准确地反映机器人的实际运动特性,基于精确的动力学模型进行工作空间分析,可以更准确地确定机器人的可达工作范围,避免机器人进入无法控制的区域。同时,精确的奇异位形识别可以有效防止机器人在奇异位形附近工作,避免出现力矩剧增和控制失效等问题,提高了机器人的安全性和可靠性。
15、优选地,步骤s2包括以下步骤:
16、步骤s21:通过机构奇异位形点数据对末端工作空间范围数据进行工作位姿空间优化,得到优化作业空间数据;
17、步骤s22:基于机械手动力学模型对并联机器人进行驱动关节关键位置标注,并进行末端执行器监测传感器网络部署,得到传感器监测网络;
18、步骤s23:根据优化作业空间数据利用传感器监测网络对并联机器人进行模态振动测试,生成模态振动特征参数;
19、步骤s24:对并联机器人进行高速运动任务轨迹规划,并利用传感器监测网络进行残余振动特征提取,生成运动任务残余振动特征数据。
20、本发明,通过机构奇异位形点数据对末端工作空间进行优化,避免了机器人在奇异位形区域工作,从而从根本上降低了奇异位形引起的振动风险,并提高了机器人的安全性。基于动力学模型进行驱动关节关键位置标注,并结合加速度传感器和激光位移传感器部署传感器监测网络,实现了对机器人振动状态的全面、精准监测。加速度传感器可以捕捉高频振动信息,而激光位移传感器则可以测量低频位移变化,两者结合能够提供更完整的振动数据。基于优化后的工作空间进行模态振动测试,能够更准确地识别机器人的固有频率和振型,避免了奇异位形对测试结果的干扰,针对优化后的工作空间进行测试,排除了奇异位形的影响,提高了测试结果的准确性和可靠性。通过规划高速运动任务轨迹并进行残余振动特征提取,可以获得更贴近实际工况的振动数据。
21、优选地,步骤s23包括以下步骤:
22、步骤s231:根据优化作业空间数据进行工作测试点选取,生成空间测试点位置数据;
23、步骤s232:通过空间测试点位置数据对并联机器人进行模态振型预估,生成主要模态振型数据;
24、步骤s233:基于主要模态振型数据以及空间测试点位置数据利用传感器监测网络对并联机器人进行初步模态测试,生成初步模态振动特征参数;
25、步骤s234:利用预设的多自由度振子模型对初步模态振动特征参数进行子空间控制参数辨识,并进行振动模态参数关联,生成模态振动特征参数。
26、本发明基于优化后的工作空间进行测试点选取,避免了在奇异位形附近进行测试,从而保证了测试结果的有效性和可靠性。根据优化后的工作空间有针对性地选择测试点,减少了不必要的测试,提高了测试效率。预估的模态振型信息可以帮助确定传感器的最佳位置,以及激励信号的最佳频率和幅值,从而提高测试效率和准确性。初步模态测试和子空间控制参数辨识的结合,有效地提高了模态参数识别的精度。初步模态测试可以快速获取初步的模态参数,而子空间控制参数辨识则可以在此基础上进行更精细的辨识。利用预设的多自由度振子模型进行子空间控制参数辨识,可以有效降低计算复杂度,提高辨识效率。相比于复杂的有限元模型,预设的振子模型更加简洁高效,能够在保证一定精度的前提下,显著降低计算成本和时间,使得模态参数辨识更加实用。
27、优选地,步骤s233包括以下步骤:
28、基于空间测试点位置数据对并联机器人进行末端脉冲激励测试,并利用传感器监测网络进行振动响应信号采集,得到脉冲激励响应数据;
29、根据脉冲激励响应数据进行姿态固有频率初估算,生成多姿态固有频率预估数据;
30、根据多姿态固有频率预估数据进行多频正弦激励信号处理,并利用预设的伪随机激励信号进行信号叠加,从而得到多频正弦激励信号数据;
31、基于多频正弦激励信号数据通过控制器驱动并联机器人关节电机进行正弦扫频运动,并利用传感器监测网络进行正弦扫频振动响应,得到正弦扫频激励响应数据;
32、通过主要模态振型数据对正弦扫频激励响应数据进行频响拟合,并根据多姿态固有频率预估数据进行固有频率阻尼比计算,得到固有频率阻尼比数据;
33、将多姿态固有频率预估数据、固有频率阻尼比数据以及主要模态振型数据进行振动初步模态参数整合,得到初步模态振动特征参数。
34、本发明采用脉冲激励测试和传感器监测网络,可以快速获取机器人在不同姿态下的振动响应数据,并进行姿态固有频率的初估算,能够快速提供初步的频率信息,提高了测试效率。基于多姿态固有频率预估数据生成多频正弦激励信号,并叠加伪随机激励信号,可以有效激发机器人的多阶模态,并提高信噪比。相比于单频正弦激励,多频激励能够同时激发多个模态,减少了测试时间;而伪随机信号的叠加则可以进一步增强激励信号的丰富性,提高模态识别的准确性。利用控制器驱动关节电机进行正弦扫频运动,并结合传感器监测网络采集振动响应数据,可以获取更精细的频响特性。正弦扫频激励能够覆盖更宽的频率范围,并以更小的频率步长进行扫描,从而获得更详细的频响信息。通过主要模态振型数据对正弦扫频激励响应数据进行频响拟合,并结合多姿态固有频率预估数据计算固有频率阻尼比,可以准确识别机器人的固有频率、阻尼比和振型等关键模态参数。
35、优选地,步骤s24包括以下步骤:
36、步骤s241:对并联机器人进行实际工作任务分析,并进行典型高速运动模式处理,生成高速运动模式数据;
37、步骤s242:通过优化作业空间数据对高速运动模式数据进行高速运动任务轨迹规划,并进行运动参数设定,从而得到高速运动任务序列数据;
38、步骤s243:基于高速运动任务序列数据控制并联机器人依次执行高速运动任务,并利用传感器监测网络进行多通道末端振动同步采集,生成残余振动原始信号数据;
39、步骤s244:对残余振动原始信号数据进行时频域变换处理,生成残余振动时频谱数据;
40、步骤s245:根据残余振动时频谱数据进行振动信号衰减时间提取,生成振动衰减时间数据;
41、步骤s246:对残余振动时频谱数据进行主导频率提取,生成残余振动主导频率数据;
42、步骤s247:对残余振动时频谱数据进行振动能量衰减率计算,生成振动能量衰减率数据;
43、步骤s248:根据振动衰减时间数据、残余振动主导频率数据以及振动能量衰减率数据进行残余振动特征聚类处理,并根据高速运动任务序列数据进行运动任务映射处理,生成运动任务残余振动特征数据。
44、本发明从实际工作任务出发,分析并提取典型高速运动模式,确保了后续轨迹规划和振动测试的实用性和针对性。相比于传统的随机轨迹测试,基于实际工作任务的测试方法能够更准确地反映机器人实际工作时的振动特性,从而更有针对性地进行振动抑制。在优化工作空间的基础上进行高速运动轨迹规划,避免了机器人在奇异位形附近运动,从而保证了测试结果的有效性和安全性。利用传感器监测网络进行多通道末端振动同步采集,可以获取更全面的振动信息,并避免了单点测量带来的误差。多通道数据采集能够更完整地反映机器人末端的振动状态。通过对采集到的振动数据进行时频域变换处理,可以提取出振动信号的衰减时间、主导频率和能量衰减率等关键特征参数。时频域分析能够更清晰地展现振动信号的频率成分和时间演化规律,从而更准确地提取残余振动的特征信息。将提取的特征参数进行聚类处理,并映射到相应的运动任务,可以建立运动任务与残余振动特征之间的关联关系。
45、优选地,步骤s3包括以下步骤:
46、步骤s31:对运动任务残余振动特征数据进行振动特征量区间划分,生成特征量区间划分数据;
47、步骤s32:通过特征量区间划分数据对运动任务残余振动特征数据进行模糊变量定义,分别得到输入模糊变量数据以及输出模糊变量数据;其中,输入模糊变量数据包括振动衰减时间数据、主导频率数据以及能量衰减率数据;输出模糊变量数据包括速度前馈增益数据以及加速度反馈增益数据;
48、步骤s33:通过预设的振动模式模糊控制规则库对振动衰减时间数据、主导频率数据、能量衰减率数据、速度前馈增益数据以及加速度反馈增益数据进行输入输出模糊控制规则映射,生成振动抑制控制规则策略;
49、步骤s34:对并联机器人进行振动控制性能需求指标处理,生成振动控制性能需求指标数据;
50、步骤s35:通过模态振动特征参数对振动抑制控制规则策略以及振动控制性能需求指标数据进行控制参数智能调节策略处理,得到智能振动控制参数调节策略。
51、本发明对运动任务残余振动特征数据进行特征量区间划分,并定义模糊变量,将复杂的振动特征数据转化为模糊语言变量,使得控制规则更易于理解和表达,也更能贴合实际情况。模糊变量的引入能够更好地处理振动特征数据的不确定性和模糊性。利用预设的振动模式模糊控制规则库进行输入输出模糊控制规则映射,建立了振动特征量与控制参数之间的非线性映射关系。模糊控制规则库的应用避免了复杂的数学建模,简化了控制器的设计,并能够有效处理非线性系统。引入振动控制性能需求指标,并将模态振动特征参数融入控制参数智能调节策略中,实现了控制参数的精细化调节。控制性能需求指标的引入使得控制目标更加明确,而模态振动特征参数的加入则能够根据机器人自身的振动特性进行控制参数的优化,从而提高振动抑制的针对性和有效性。
52、优选地,步骤s35包括以下步骤:
53、步骤s351:基于振动控制性能需求指标数据进行残余振动控制参数提取,得到多维残余振动控制空间参数;
54、步骤s352:利用模态振动特征参数对多维残余振动控制空间参数进行振动控制参数敏感度计算,生成残余振动控制参数权重数据;
55、步骤s353:根据残余振动控制参数权重数据以及振动控制性能需求指标数据进行振动控制性能目标处理,并利用粒子群算法以及振动抑制控制规则策略进行振动控制参数调节模型构建,生成振动控制参数调节模型;
56、步骤s354:对振动控制参数调节模型进行模糊控制参数粒子群初始化,生成初始化控制参数粒子群数据;
57、步骤s355:对初始化控制参数粒子群数据进行一阶贡献效应指数计算,并进行粒子适应度评估,生成控制参数适应度值;
58、步骤s356:基于控制参数适应度值利用振动控制参数调节模型进行粒子位置更新,并进行控制参数迭代寻优,从而得到智能振动控制参数调节策略。
59、本发明基于振动控制性能需求指标提取多维残余振动控制空间参数,为后续的控制参数寻优提供了搜索空间。多维参数空间的构建能够更全面地考虑各种影响因素,从而找到更优的控制参数组合。利用模态振动特征参数计算残余振动控制参数敏感度,并生成控制参数权重数据,为粒子群算法的寻优过程提供了指导。控制参数敏感度的计算能够识别对振动抑制效果影响较大的关键参数,从而提高寻优效率,避免盲目搜索。结合残余振动控制参数权重数据、振动控制性能需求指标数据和振动抑制控制规则策略,构建振动控制参数调节模型,为粒子群算法的应用提供了框架。该模型将模糊控制规则与粒子群算法相结合,实现了基于规则的智能寻优。通过控制参数迭代寻优得到智能振动控制参数调节策略,能够根据不同的振动情况自适应地调整控制参数,从而实现更精准的振动抑制。
60、优选地,步骤s4包括以下步骤:
61、步骤s41:利用终端设备获取机械手前馈控制参数;其中,机械手前馈控制参数包括前馈监测时域数据、前馈控制时域数据以及控制补偿数据;
62、步骤s42:当并联机器人进行实时高速作业时,基于前馈监测时域数据、前馈控制时域数据以及控制补偿数据利用传感器监测网络进行末端执行器实时振动监测,得到实时振动监测状态数据;
63、步骤s43:对实时振动监测状态数据进行末端振动特征提取,生成实时末端振动特征数据;
64、步骤s44:通过智能振动控制参数调节策略对实时末端振动特征数据进行智能前馈补偿控制调节处理,生成前馈补偿控制调节参数;
65、步骤s45:对并联机器人进行控制参数缓冲区设置,并根据前馈补偿控制调节参数进行控制参数平滑切换,以实现三自由度并联机器人智能参数调节控制作业。
66、本发明利用终端设备获取机械手前馈控制参数,包括前馈监测时域数据、前馈控制时域数据以及控制补偿数据。基于前馈控制参数和传感器监测网络,对并联机器人在实时高速作业时的末端执行器进行实时振动监测,实时振动监测能够及时捕捉机器人末端的振动状态。智能前馈控制能够根据实时振动特征数据预测并补偿即将发生的振动,从而有效减少残余振动。通过设置控制参数缓冲区,并根据前馈补偿控制调节参数进行控制参数平滑切换,避免了控制参数的突变,保证了控制系统的稳定性。通过实时振动监测、智能前馈补偿控制和控制参数平滑切换的协同作用,实现了对并联机器人残余振动的有效抑制,显著提高了机器人高速作业时的定位精度和稳定性,并保证了机器人工作的可靠性和安全性。
67、本发明还提供一种三自由度并联机器人控制参数调节系统,执行如上所述的三自由度并联机器人控制参数调节方法,该三自由度并联机器人控制参数调节系统包括:
68、机器人动力学建模模块,用于对并联机器人进行机械手动力学模型建立,生成机械手动力学模型;根据机械手动力学模型进行末端作业空间分析,生成末端工作空间范围数据;通过末端工作空间范围数据对机械手动力学模型进行机构奇异位形识别,得到机构奇异位形点数据;
69、残余振动提取模块,用于通过机构奇异位形点数据对末端工作空间范围数据进行工作位姿空间优化,得到优化作业空间数据;对并联机器人进行末端监测传感器网络部署,得到传感器监测网络;利用传感器监测网络对并联机器人进行模态振动测试,生成模态振动特征参数;利用传感器监测网络对并联机器人进行高速运动残振特征提取,生成运动任务残余振动特征数据;
70、智能振动控制模块,用于对运动任务残余振动特征数据进行自适应规则调整策略处理,生成振动抑制控制规则策略;通过模态振动特征参数对振动抑制控制规则策略进行控制参数智能调节策略处理,得到智能振动控制参数调节策略;
71、实时振动控制执行模块,用于利用传感器监测网络对并联机器人进行末端执行器实时振动监测,生成实时末端振动特征数据;通过智能振动控制参数调节策略对实时末端振动特征数据进行智能前馈补偿控制调节处理,生成前馈补偿控制调节参数;通过前馈补偿控制调节参数对并联机器人进行控制参数平滑切换,以实现三自由度并联机器人智能参数调节控制作业。
- 还没有人留言评论。精彩留言会获得点赞!