一种用于微型机器人的SCM智能自感知关节铰链及方法
本发明属于微型机器人,具体涉及一种用于微型机器人的scm智能自感知关节铰链及方法。
背景技术:
1、在当前机器人姿态闭环控制的研究中,机器人通常依靠在关键关节部位安装的传感器来感知关节姿态,并据此实现对整体机器人姿态的精准控制。尽管这些传感器能够提供精确的关节姿态信息,但它们的体积和重量限制了在微型机器人关节中的直接应用。
2、因此,尽管依靠精细的机械设计和先进的制造工艺,当前的微型机器人可以实现相当高的传动精度,但由于缺失了高效的关节角度闭环反馈系统,在面对不同负载或不稳定的动力输入时,会导致显著的运动偏差,在实际控制中难以像大尺寸机器人一样被直接应用于各项自动化任务。
3、目前解决微型机器人关节角度感知的主要技术方案包含三种:
4、第一种是在scm铰链中压入一段蛇形康铜片,其通过金属层在拉伸或压缩中产生的电阻变化来感知角度的改变。但康铜在弯折时需要保证足够的弯曲半径,因此这种方案在将传感器集成进scm铰链的过程中需要破坏scm铰链的整体性给传感器留出足够的形变区域,以避免材料的过度应力和潜在的断裂,传感器固定在左侧铰链处,并可以自由地滑进和滑出右侧铰链预留的镂空层,在康铜需要弯折的区域,删除了原本用来固定铰链方向的城墙齿,给康铜形变用。这可能会导致微型机构整体刚度的破坏。同时,康铜片的疲劳特性也注定这种传感器无法实现长期的角度检测,其在一定的弯折循环后容易发生断裂。
5、第二种方案是在铰链处粘贴应变片,但这无法与scm工艺一体化,同时存在与康铜一样的弯曲半径和寿命问题。
6、第三种是在scm工艺的聚酰亚胺薄膜中心轴上打印微型蛇形电路。但此方案在较大的弯折角度下容易断裂,且传感线性度较差。同时,该方案并没有真正实现在微型机构上部署该传感器,而是选择在相似工艺的放大版millidelta中开展相关实验,该方案在微型机器人中的表现未曾可知。
7、因此,如何实现准确、可靠且不影响scm铰链自身结构性能的角度自感知,是目前亟待解决的技术问题。
技术实现思路
1、本发明的目的在于解决现有技术中的上述技术问题,并提供一种用于微型机器人的scm智能自感知关节铰链及方法。
2、本发明所采用的具体技术方案如下:
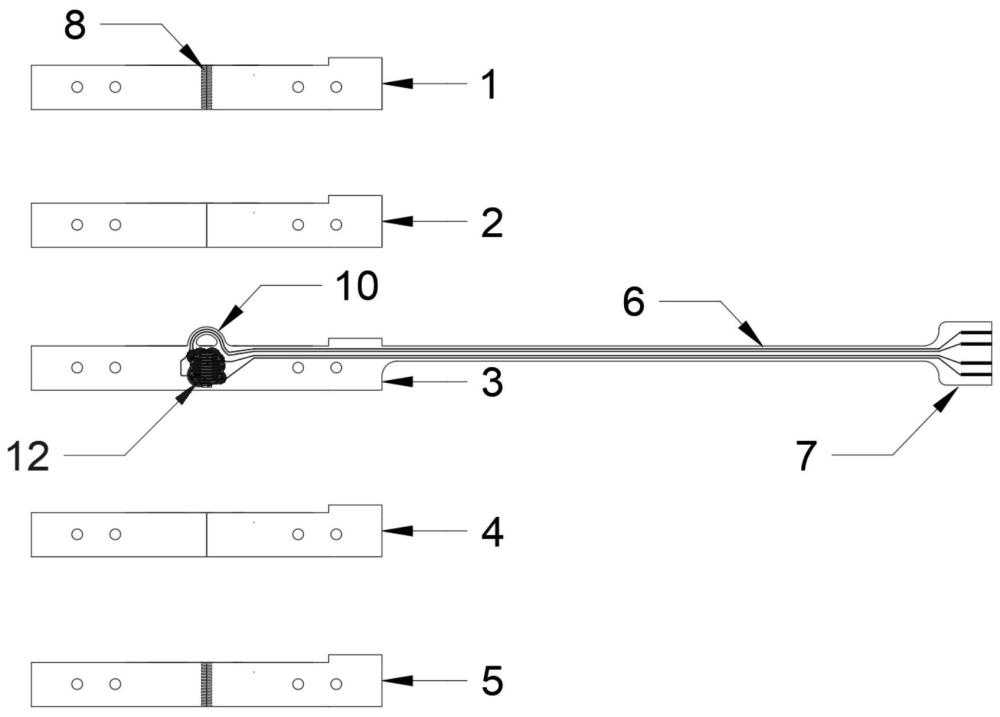
3、第一方面,本发明提供了一种用于微型机器人的scm智能自感知关节铰链,其包括第一碳纤板、第一粘结层、柔性电路板、第二粘结层、第二碳纤板、导线和转接底座;
4、所述柔性电路板以聚酰亚胺薄膜为基材,以基材的单侧表面或者双侧表面为刻蚀面,每个刻蚀面通过激光刻蚀形成以铰链转轴为中心线对称的微结构刻蚀图案,且环绕着微结构刻蚀图案的边缘布置有一系列金属电极,每个金属电极均通过导线连接至用于连接外部电路的转接底座,每个刻蚀面上的微结构刻蚀图案以及所有金属电极均被碳纳米管薄膜完全覆盖,形成压阻式薄膜传感器;
5、所述第一碳纤板、第一粘结层、柔性电路板、第二粘结层和第二碳纤板依次粘结形成多层复合形式的关节铰链,且第一碳纤板和第二碳纤板分别在铰链转轴位置断开,每块碳纤板在断开位置两侧通过边缘锯齿交错嵌合,从而在限制平移自由度的同时保持绕铰链转轴的旋转自由度。
6、作为上述第一方面的优选,所述柔性电路板整体呈长条形,以所述铰链转轴为界分为两个连杆部分,且柔性电路板在铰链转轴位置具有外凸部分,位于其中一个连杆部分上的所有金属电极所连接的导线均绕过铰链转轴,并通过外凸部分走线汇聚至另一个连杆部分上,再统一连接至转接底座。
7、作为上述第一方面的优选,所述碳纳米管薄膜由碳纳米管、炭黑与树脂粘结剂混合而成的均质导电浆料涂布于微结构刻蚀图案和金属电极所在的基材表面后固化而成,碳纳米管薄膜的厚度为微米级。
8、作为上述第一方面的优选,所述微结构刻蚀图案的外包轮廓呈圆形,所有金属电极均匀分布于圆形外包轮廓上,且两两配对构成用于测量电阻的电极对。
9、作为上述第一方面的优选,所述微结构刻蚀图案的外轮廓为圆形,圆形外轮廓区域内部保留有交错且平行的未刻蚀矩形条,其余的区域均通过激光烧蚀形成蛇形弯折的连续凹槽。
10、作为上述第一方面的优选,所述未刻蚀矩形条的长边方向与所述铰链转轴垂直。
11、作为上述第一方面的优选,所述第一粘结层和第二粘结层的粘结材料为粘胶、胶水或者热压胶带。
12、第二方面,本发明提供了一种如上述第一方面任一项方案所述用于微型机器人的scm智能自感知关节铰链的制造方法,其包括:
13、s1、在柔性电路板的聚酰亚胺薄膜基材表面定位铰链转轴位置,然后以铰链转轴为中心对称线,通过激光烧蚀技术在基材表面加工出对称的微结构刻蚀图案,并沿着微结构刻蚀图案的外包轮廓加工一系列所述金属电极,每个金属电极均通过导线连接至用于连接外部电路的转接底座;
14、s2、将碳纳米管、炭黑和树脂粘结剂充分混合形成的均质导电浆料加入容器中,并逐步将均质导电浆料转移至聚酰亚胺薄膜基材表面,使均质导电浆料通过自流平成膜的方式完全覆盖微结构刻蚀图案以及金属电极,再固化形成厚度均匀的碳纳米管薄膜;
15、s3、将所述第一碳纤板、所述第一粘结层、加工有碳纳米管薄膜、微结构刻蚀图案以及金属电极的柔性电路板、所述第二粘结层、所述第二碳纤板依次层叠,保持所述第一碳纤板和所述第二碳纤板的边缘锯齿交错区域与所述柔性电路板上定位的铰链转轴位置重合,然后对层叠后的复合结构进行热压固定,形成多层复合形式的关节铰链。
16、作为上述第二方面的优选,所述碳纳米管为经过功能化修饰的碳纳米管材料,功能化修饰方式为将碳纳米管和碳纳米管分散剂的混合悬浮液经过匀质分散后再进行喷雾干燥;所述炭黑为经过功能化修饰的炭黑材料,功能化修饰方式为将炭黑和炭黑分散剂的混合悬浮液经过砂磨分散后再进行喷雾干燥。
17、作为上述第二方面的优选,所述均质导电浆料的制备方法为:向氢化sbs粉末的环己烷溶液中加入二丙二醇甲醚,然后在搅拌状态下加入功能化修饰后的碳纳米管材料、功能化修饰后的炭黑材料和聚酰胺蜡,再转移至球磨罐中进行球磨,最终获得均质导电浆料。
18、本发明相对于现有技术而言,具有以下有益效果:
19、针对当前微型自感知铰链中存在的问题,本发明设计了一种可集成进scm铰链的压阻式薄膜传感器,该传感器在传统scm铰链中间的聚酰亚胺薄膜上加工微结构刻蚀图案、金属电极以及碳纳米管薄膜,利用微结构保持聚酰亚胺薄膜的表面形成各向异性状态,使得聚酰亚胺薄膜会随铰链弯折产生更大的形变量,涂布固化在微结构刻蚀图案上的碳纳米管薄膜也会产生相应强度更大的裂纹,从而放大金属电极所能检测到的阻抗变化,更精确地感知铰链的弯折角度。这种方案制备的碳纳米管薄膜仅有几微米厚,对scm结构本身不会产生任何影响,同时避免了在scm铰链中预留形变凹槽的需要。由于在制备过程中无需额外组件的加入,该方案便于进行紧凑型弯曲传感器的大批量制备,为微型机器人关节角度感测提供了一种高效且精准的新解决方案。
- 还没有人留言评论。精彩留言会获得点赞!