插纱机器人的制作方法
本发明涉及纺织,具体涉及一种插纱机器人。
背景技术:
1、随着社会经济发展与产业升级,对劳动密集型行业的现有设备进行自动化改造、用智能机器人代替工人重复枯燥的工作具有重大意义。纺织行业作为主要的劳动密集型行业之一,具有较高的人工成本,在管纱的处理过程中,很多环节需要按规定放置的管纱,需要配备插纱工人才能完成日常生产,插纱工人每天重复拿取管纱、挑选、放置等机械动作,人工成本高。
技术实现思路
1、因此,为了克服上述现有技术的缺点,本发明提供一种插纱机器人,可以达到自动完成输送、区分大小头、找线头、管纱投放给络筒机等工序的技术效果。
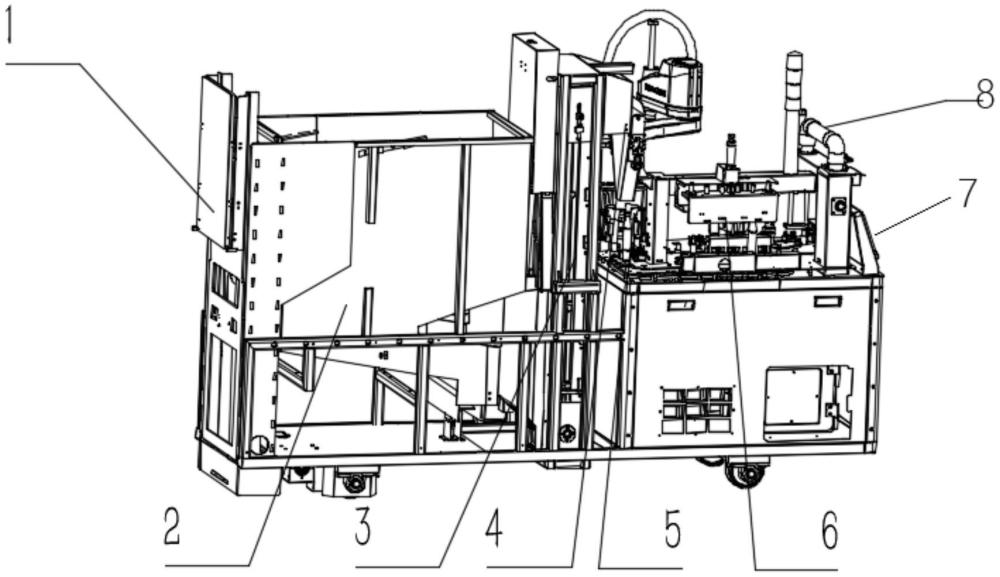
2、为了实现上述目的,本发明提供一种插纱机器人,包括:举升翻转装置,用于将管纱从管纱运料车中转移至预定高度的振动料仓中;振动料仓,用于存储来自所述举升翻转装置的管纱,并通过振动使得所述管纱有序地滚落到所述振动料仓的出料口;管纱上料提升装置,与所述料仓的出料口对接固定,用于将管纱垂直提升;管纱调整装置,位于所述管纱上料提升装置的后方,用于区分管纱的大小头,并调整所述管纱的坠落方向,使所述管纱大头朝下掉落到输送装置上;挑线装置,用于从掉落到输送装置上的管纱的纱身分离出纱线头,并将纱线头缠绕在所述管纱的小头端;负压送纱装置,用于吸附所述管纱的所述小头端的纱线头,管纱通过输送装置按照指定路径被输送转移;管纱投放装置,用于接收所述负压送纱装置转移的纱线头,并将纱线头和对应的管纱投放给络筒机纱库。
3、在其中一个实施例中,所述举升翻转装置包括:装置支架,固定在料仓进料侧的侧壁上;翻转机构,安装在所述装置支架上,用于以所述料仓与所述装置支架的铰接点为轴心,翻转所述管纱运料车至预定位置;固定机构,设置在所述翻转机构上,用于将所述管纱运料车固定在所述翻转机构上;起升机构,用于控制所述翻转机构实现所述管纱运料车的原地翻转。
4、在其中一个实施例中,所述振动料仓包括:料仓本体,上部设置有投料口,所述料仓本体的漏斗形底部设置有出料口;滑料板,设置在所述料仓本体内,用于使来自所述管纱运料车的管纱缓慢滑落;振动底板,设置在所述滑料板的下方并配合所述滑料板的底面形成所述出料口,用于通过振动控制来自所述滑料板的所述管纱有序地从所述振动底板的上斜面滑落;振动机构,用于控制所述振动底板的振动;线头负压吸取机构,设置在所述振动底板的尾端,用于通过负压吸取经过的所述管纱的线头;剪断机构,与所述振动底板间隔形成落料缝,用于对经过的所述管纱的线头进行剪断;升降机构,设置在所述线头吸取机构与所述剪断机构之间且位于所述落料缝的下方,用于控制线头被吸附的所述管纱运送给所述剪断机构的频率。
5、在其中一个实施例中,所述管纱上料提升装置包括:固定框架;上料仓,安装在所述固定框架的底部,用于容纳所述料仓输送来的管纱;提升模块,安装在所述固定框架内,用于将所述上料仓中的所述管纱竖直提升到所述预定高度,所述提升模块包括固定在所述固定框架上的支撑件、环绕所述支撑件的提升带、驱动提升带行进的驱动组件以及设置在所述提升带上的多组提升托举组件;所述提升托举组件在所述提升带的带动下绕所述支撑件循环移动以形成位于所述支撑件一侧的输送通道,所述输送通道用于沿竖直方向向上输送管纱;管纱限位模块,安装于所述固定框架且位于所述上料仓内,通过其与所述提升托举组件的配合运动,对所述上料仓中无序输送到所述提升托举组件上的管纱进行有序调整;分离模块,安装在所述提升模块的顶端,用于将所述管纱与所述提升模块分离,并将所述管纱传递给整理装置。
6、在其中一个实施例中,所述管纱调整装置包括:识别机构,用于识别管纱方向;分头机构,用于根据所述识别机构的管纱方向识别结果,将所述管纱的大头朝下释放。
7、在其中一个实施例中,所述挑线装置包括:挑刀结构;第二安装座,与所述第一安装座之间同向设置,且所述第一安装座能够相对第二安装座运动;第二喷气结构,与所述挑刀的位置对应,用于向所述管纱的斜下方进行喷气;压紧旋转结构,设置在所述第二安装座上,用于压紧所述管纱并使其沿着管纱的纱线缠绕方向旋转,其中,所述挑刀结构包括:第一安装座;至少一把挑刀,柔性安装在所述第一安装座上,所述挑刀从管纱的纱身分离出纱线头。
8、在其中一个实施例中,所述挑刀包括:挑刀主体,在外力的作用下与所述管纱的表面柔性接触,用于挑起所述表面的外层纱线,所述挑刀主体包括挑起所述纱线的粗钝刀口、安装在所述挑线装置的安装部、以及连接所述粗钝刀口和所述安装部的刀身段;挑刀刀片,设置在所述刀身段,用于将被挑起的所述纱线与所述纱身进行切断。
9、在其中一个实施例中,所述负压送纱装置包括:第一负压吸取部,包括第一吸取头、纱线头转移单元和第一负压管路,所述第一吸取头对输送到所述工作台上第一指定位置的所述管纱的线头逐一进行吸取,吸取的所述纱线头进入所述第一负压管路;负压旋转吸取部,具有摆动臂以及与该摆动臂连通的第二负压管路,当所述摆动臂移至所述第一吸取头的附近时,所述纱线头转移单元临时封堵所述第一吸取头并将所述线头移至所述摆动臂附近,所述摆动臂采用负压对所述线头逐一进行吸取;第三负压吸取部,采用负压吸取所述摆动臂旋转送来的多个所述管纱的线头;控制部,用于控制第一负压吸取部、负压旋转吸取部、第三负压吸取部的负压。
10、在其中一个实施例中,所述第一吸取头包括:竖向导向杆,设置在所述第一指定位置附近,在外侧壁上套设有活动座;伸缩管路,一端与所述第一负压管道连通,另一端在所述活动座的带动下可沿所述竖向导向杆进行竖向往复运动,所述纱线头转移单元包括:线头拨板,沿所述第一吸取头的端口水平转动,引导线头进入所述第一吸取头或者引导所述纱线头进入所述摆动臂;驱动单元,用于驱动所述线头拨板。
11、在其中一个实施例中,管纱投放装置包括:机械手,一端固定在所述插纱机器人的车身上,另一端根据控制信号进行水平移动;伸缩套组,固定在所述机械手的所述另一端上,可根据控制信号进行竖向移动;气囊夹管组件,用于夹持至少一个管纱并将所述管纱投放给络筒机纱库,其中,所述气囊夹管组件包括扇形的安装板以及多个设置在所述安装板前端的夹纱器,所述安装板在圆心处设置有中空套管,该中空套管与所述伸缩套组的中空管路连通,用于负压吸取被转移的管纱的纱线头,所述夹纱器用于夹持所述管纱。
12、与现有技术相比,本发明的优点在于:具有替代员工进行高强度工作,进行快速投料补料的功能,提升了络筒机补充管纱的工作效率,以满足生产线的生产需求。而本发明的插纱机器人通过举升翻转装置实现了管纱的安全迁移;振动料仓通过振动使得管纱有序地滚落,避免了管纱线头的缠绕;管纱上料提升装置保证了将管纱垂直提升;管纱调整装置使管纱大头朝下掉落到输送装置上;挑线装置从掉落到输送装置上的管纱的纱身分离出纱线头,并将纱线头缠绕在所述管纱的小头端;负压送纱装置吸附所述管纱的所述小头端的纱线头;管纱投放装置接收所述负压送纱装置转移的纱线头,并将纱线头和对应的管纱投放给络筒机纱库。整个机器人各模块运转时间并联,大大提高了工作效率,使得一个员工可以看管多台设备,专注于解决络筒机本身存在的故障。
- 还没有人留言评论。精彩留言会获得点赞!