一种机械臂运动轨迹优化方法、系统、存储介质及电子设备
本发明涉及机械臂控制,特别涉及一种机械臂运动轨迹优化方法、系统、存储介质及电子设备。
背景技术:
1、在机械臂技术快速发展的背景下,其应用场景已经涵盖了工业生产、家庭服务、医疗健康等多个领域。在这些应用中,机械臂需要与用户进行实时交互,例如搬运物品、递送物品和固定物品等。
2、然而,机械臂的运动轨迹规划往往需要根据实际环境和用户需求进行动态调整。现有的技术普遍依赖于预设的运动路径和固定的轨迹规划,缺乏对用户实时需求变化的灵活响应机制。尽管在某些场景下,机械臂已经具备了一定的自动轨迹规划能力,但目前大部分机械臂在与用户互动时,尤其是在用户需求突变(如用户突然启动电视或从事其他活动)时,仍然难以做出足够灵活和智能的应对,这可能导致机械臂的运动干扰到用户的正常活动(如遮挡电视屏幕、影响视线或妨碍用户进行其他操作),导致交互过程不顺畅,进而十分影响用户体验。
3、因此,亟需一种更加灵活的轨迹优化方法,通过智能化的方式优化机械臂的运动轨迹,使其能够自动适应用户需求的突然变化,并避免在交互过程中产生不必要的冲突。
技术实现思路
1、本发明目的之一在于提供了一种机械臂运动轨迹优化方法,当机械臂与用户之间进行交互出现突发情况时,识别需要进行局部轨迹优化的第一最新关键区域,基于机械臂沿进入第一最新关键区域之前的第一局部轨迹运动时与用户之间进行交互的第一交互情况,对进入第一最新关键区域中的第二局部轨迹进行优化替换处理,使得机械臂未来沿优化替换处理后的第二局部轨迹运动时能够适应该突发情况,实现在用户需求突变时做出灵活和智能应对,避免干扰用户的正常活动,保证交互过程顺畅,极大程度上提升了用户体验。
2、本发明实施例提供的一种机械臂运动轨迹优化方法,包括:
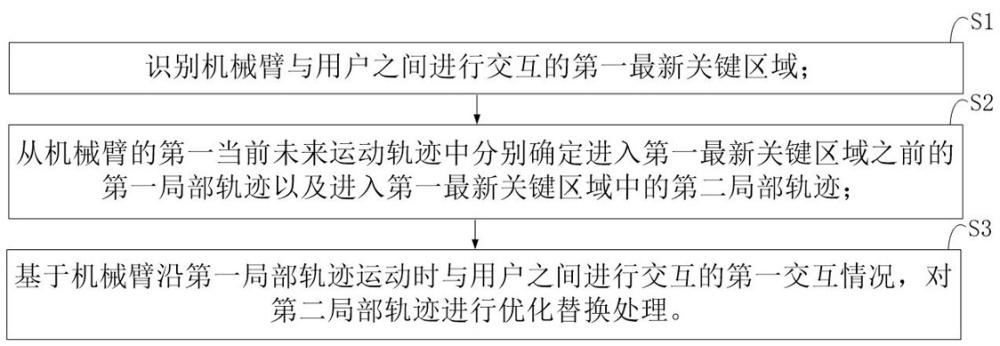
3、识别机械臂与用户之间进行交互的第一最新关键区域;
4、从机械臂的第一当前未来运动轨迹中分别确定进入第一最新关键区域之前的第一局部轨迹以及进入第一最新关键区域中的第二局部轨迹;
5、基于机械臂沿第一局部轨迹运动时与用户之间进行交互的第一交互情况,对第二局部轨迹进行优化替换处理。
6、可选的,所述识别机械臂与用户之间进行交互的第一最新关键区域,包括:
7、获取机械臂最近一次与用户进行交互之后用户的视野变化序列;
8、基于机械臂在视野变化序列中的每一第一视野中先后出现的出现度,绘制出现度曲线;
9、当在出现度曲线中首次波峰之后紧接着连续出现超过n个高于首次波峰的目标波峰时,从视野变化序列中截取目标波峰的首尾波峰各自对应第一视野之间的局部视野序列;其中,n为大于等于2的正整数;
10、获取在局部视野序列中每一第二视野中均出现的目标对象集;
11、将目标对象集与多个标准对象集分别进行匹配;
12、当匹配符合时,获取匹配符合的标准对象集的关键对象指示规则;
13、基于关键对象指示规则,从目标对象集中确定关键对象以及对应的优化类别;
14、当优化类别为主动优化时,将出现度曲线中波谷对应第一视野中最后一个出现关键对象的第一视野的区域作为第一最新关键区域;
15、当优化类别为被动优化时,将目标波峰对应第一视野之间的重叠视野的区域作为第一最新关键区域。
16、可选的,所述基于机械臂沿第一局部轨迹运动时与用户之间进行交互的第一交互情况,对第二局部轨迹进行优化替换处理,包括:
17、对第一交互情况进行特征描述处理,获得第一特征描述向量;
18、当优化类别为主动优化时,从主动行为库中确定第一特征描述向量对应的主动行为;
19、对第二局部轨迹进行优化替换处理,使得机械臂沿优化替换处理后的第二局部轨迹运动时能够在第一最新关键区域中表现出主动行为;
20、当优化类别为被动优化时,从被动行为库中确定第一特征描述向量对应的被动行为;
21、对第二局部轨迹进行优化替换处理,使得机械臂沿优化替换处理后的第二局部轨迹运动时能够在第一最新关键区域之外任意区域表现出被动行为。
22、可选的,所述基于机械臂在视野变化序列中的每一第一视野中先后出现的出现度,绘制出现度曲线,包括:
23、基于曲线绘制模板,根据机械臂在视野变化序列中的每一第一视野中先后出现的出现度,绘制出现度曲线;
24、其中,曲线绘制模板中的模板曲线坐标系的横轴为视野变化的顺序,模板曲线坐标系的纵轴为出现度大小。
25、可选的,所述基于机械臂沿第一局部轨迹运动时与用户之间进行交互的第一交互情况,对第二局部轨迹进行优化替换处理的之后,还包括:
26、当机械臂沿优化替换处理后的第二局部轨迹运动结束之后,若其他用户在第一最新关键区域内停留超过第一预设时长时,识别机械臂与用户、其他用户之间进行交互的第二最新关键区域;
27、从机械臂的第二当前未来运动轨迹中分别确定进入第二最新关键区域之前的第三局部轨迹以及进入第二最新关键区域中的第四局部轨迹;
28、基于机械臂沿第三局部轨迹运动时用户与其他用户之间进行交互的第二交互情况,对第四局部轨迹进行优化替换处理。
29、可选的,所述识别机械臂与用户、其他用户之间进行交互的第二最新关键区域,包括:
30、当关键对象持续超过第二预设时长未出现于用户与其他用户的第三视野中时,将用户与其他用户的第三视野中重叠保持超过第三预设时长的重叠视野的区域作为第二最新关键区域。
31、可选的,所述基于机械臂沿第三局部轨迹运动时用户与其他用户之间进行交互的第二交互情况,对第四局部轨迹进行优化替换处理,包括:
32、对第二交互情况进行特征描述处理,获得第二特征描述向量;
33、从交互触发度库中确定第二特征描述向量对应的交互触发度;
34、当交互触发度超过触发度阈值时,规划机械臂持续对接关键对象的对接行为;
35、对第四局部轨迹进行优化替换处理,使得机械臂沿优化替换处理后的第四局部轨迹运动时能够在第二最新关键区域中表现出对接行为。
36、本发明实施例提供的一种机械臂运动轨迹优化系统,包括:
37、最新关键区域识别模块,用于识别机械臂与用户之间进行交互的第一最新关键区域;
38、局部轨迹确定模块,用于从机械臂的第一当前未来运动轨迹中分别确定进入第一最新关键区域之前的第一局部轨迹以及进入第一最新关键区域中的第二局部轨迹;
39、轨迹优化替换处理模块,用于基于机械臂沿第一局部轨迹运动时与用户之间进行交互的第一交互情况,对第二局部轨迹进行优化替换处理。
40、本发明实施例提供的一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,处理器执行所述计算机程序,实现上述任一项所述的方法。
41、本发明实施例提供的一种电子设备,该电子设备包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序,实现上述任一项所述的方法。
42、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
43、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!