一种元宇宙展示的高空喷涂机器人轨迹喷涂方法
本本发明涉及一种元宇宙展示的高空喷涂机器人轨迹喷涂方法,其属于船舶业元宇宙的。
背景技术:
1、高空喷涂机器人是一种用于船舶制造和维护的自动化设备,主要用于船体外部的高空喷涂作业。这类机器人能够提高喷涂效率、减少人工操作的风险,并确保涂层的均匀性和质量。舶在制造或维护时,需要对船体外部进行防腐、防污等涂层的喷涂。传统的人工喷涂方式存在高空作业风险,且效率较低。对于大型船舶,尤其是油轮、集装箱船等,船体表面积大,喷涂工作量大,机器人可以显著提高效率。船舶高空喷涂机器人在提高效率、减少人工操作风险和提升喷涂质量方面具有显著优势,但在实际应用中也面临一些技术和操作上的问题。以下是船舶高空喷涂机器人存在的主要问题:船体表面通常具有复杂的曲面结构,机器人需要具备高精度的路径规划和自适应能力。目前的机器人技术在处理极端复杂的曲面时,可能仍存在喷涂不均匀或漏喷的问题。传统蚁群算法进行喷涂路径规划时,收敛速度较慢,尤其在复杂环境中容易造成最短路径丢失;容易陷入局部最优解,特别是搜索空间较大时;目前的喷涂机器人大多依赖预设程序或简单的传感器反馈,缺乏真正的智能化能力(如自主学习和优化喷涂路径)。
技术实现思路
1、为解决现有技术中存在的问题,本发明提供一种元宇宙展示的高空喷涂机器人轨迹喷涂方法,通过船舶智能高空喷涂机器人物理系统接收信号并储存,之后传输至元宇宙智能喷涂机器人数据传输与转换系统,数据经转换后通过元宇宙智能喷涂机器人网络系统传输至元宇宙智能喷涂机器人虚拟孪生系统,通过结合元宇宙算法系统形成路径规划,最终构成元宇宙整体智能喷涂机器人系统得以展示;形成一种以传感器通讯模块采集数据,元宇宙智能喷涂机器人数据传输与转换系统分析和处理数据,元宇宙虚拟世界展示的方法。从而精确的计算出喷涂现场的喷涂状况,监控设备的工作信息,减少水电资源的浪费和环境污染,减少因生产造成的事故。
2、本发明采用的具体技术手段如下:一种元宇宙展示的高空喷涂机器人轨迹喷涂方法,通过船舶智能高空喷涂机器人物理系统接收信号并储存,之后传输至元宇宙智能喷涂机器人数据传输与转换系统,数据经转换后通过元宇宙智能喷涂机器人网络系统传输至元宇宙智能喷涂机器人虚拟孪生系统,通过结合元宇宙算法系统形成路径规划,最终构成元宇宙整体智能喷涂机器人系统得以展示;具体包括以下步骤:
3、s1:通过视觉传感器扫描待喷涂表面信息,并建模输入作业现场区域信息,创建虚拟模型;
4、s2:提取喷枪距离、位置、作业情况信息与高架机器人位置,建虚拟模型的动态条件;
5、s3:将虚拟模型及动态条件的信息发送至云平台进行管理;
6、s4:云平台实时监测数据接收,并通过数据接收进行通信运维计算分析出喷涂轨迹的最优解;
7、喷涂轨迹最优解的计算方法为:
8、首先进行数据预处理,初始化蚁群算法参数,接着设置蚂蚁数量为每只蚂蚁确定候选道路,分析蚂蚁下一步移动位置的概率,选出若干蚂蚁的最佳路径,从而判断是否为最佳路径规划,若为最优路径则进行下一步运算,否则继续为蚂蚁寻找最优路径;接着判断迭代次数是否最大,若是最优迭代次数,路径规划结束,否则更新信息素;蚂蚁会在行走路径留下信息素,并且信息素会随着时间挥发,当完成一次迭代后进行全局信息素的更新;
9、改进整体蚁群算法机器人移动概率公式为:
10、
11、为第只蚂蚁在节点选择节点的概率;为信息素因子;为启发函数因子;为时刻节点到的信息素浓度;为t时刻路径节点i到f的启发函数;为该蚂蚁下一可选节点的集合;为t时刻节点i到集合a中s的信息素浓度;为t时刻路径节点i到集合a中s的启发函数;
12、为改进后距离启发函数,如下:
13、
14、为两目标点间的距离,分别为起点和目标点;采用对距离启发函数进行归一化处理,确保所有蚂蚁的路径在适应度评估时具有公平性;
15、
16、式中:分别为对应蚂蚁在地图中的横、纵坐标;
17、机器人在选择下一个目标点时,将根据信息素的浓度和启发函数进行判断,从而完成最优路径规划;
18、信息素更新方式为:
19、
20、
21、式中:
22、为信息素挥发系数;表示两节点上蚂蚁释放信息素的和;
23、机器人路径规划时,通过行驶后的路径留下信息素,随着时间的推移,信息素将逐渐消失,通过一次完整迭代后完成全局信息素的更新;
24、s5:通过集控台开启机器人行走单元,控制机器人进行自动化作业行进到待喷涂作业区域,并开启距离传感器控制机器人底座距待喷涂作业表面的距离,反馈于集控台;
25、s6:集控台开启机器人输送单元,使喷涂作业端到达预定位置;
26、s7:喷涂作业端内距离传感器,实时检测直到检测到喷涂作业端距船板距离为设定开始距离时,喷涂作业端内陀螺仪启动,控制喷涂作业端竖直于船板表面,上述任务完成后,反馈于集控台;
27、s8:集控台开启机器人喷涂单元,喷涂作业端内喷枪阀口开启,喷涂作业开始;
28、s9:集控台开启机器人行走单元,控制机器人行走,行进距离传感器实时检测,行进距离传感器反馈于集控台,行进距离达到设定目标距离时,喷涂作业暂停,喷枪阀口关闭;
29、s10:集控台开启输送单元,控制输送单元机械臂向下移动一个喷枪喷涂范围的距离,并检测喷涂作业端距船板距离,检测到距离为设定开始距离时,陀螺仪矫正喷涂作业端使其竖直于船板;
30、s11:重复上述工作流程直至第一个工位区域喷涂完成;集控台开启行走单元,机器人行走至下个工位区域处,并重复上述流程直至喷涂作业完成。
31、进一步地,所述船舶智能高空喷涂机器人物理系统用于提供机器人动力源及其控制;
32、所述元宇宙智能喷涂机器人数据传输与转换系统用于将传感器接收的信息和数据通过转换器,把物理信号转换为虚拟信号,并实时接收物理世界机器人本体的反馈信号;
33、所述元宇宙智能喷涂机器人虚拟孪生系统用于接收虚拟数据和信息,通过虚拟孪生技术孪生虚拟数据、机器人本体形状、机器人路径规划;将孪生后的信息通过元宇宙虚拟时空展示,并实时反馈至传感器;
34、所述元宇宙智能喷涂机器人网络系统用于将通讯系统中的物理空间管理平台、数据系统管理平台、虚拟孪生管理平台通过网络基站相连接,并引入平台服务系统实时记录地图、气象的环境变化;通过机器人本体和机器人传感器作为元宇宙虚拟时空的数据供给来源;
35、所述元宇宙算法系统用于提供路径孪生的信息来源,并通过改进蚁群算法得到迭代次数最少、平均路径最短的路径;算法系统将改进后的算法路径孪生至元宇宙虚拟时空。
36、进一步地,所述船舶智能高空喷涂机器人物理系统包括伺服电机、喷涂泵、喷涂枪、中央处理单元、电源管理系统、传感器。
37、进一步地,所述数据传输与转换系统包括数据采集模块、数据传输系统、数据转换模块、数据分析与优化、云存储与计算、用户界面、中央处理单元和安全与隐私保护。
38、进一步地,所述虚拟孪生系统包括数据孪生、形状孪生、路径孪生。
39、进一步地,所述网络系统包括物理空间管理平台、数据系统管理平台、虚拟孪生管理平台、网络基站、平台服务系统。
40、一种元宇宙展示的高空喷涂机器人轨迹喷涂方法,采用的系统包括船舶智能高空喷涂机器人物理系统、元宇宙整体智能喷涂机器人系统、元宇宙智能喷涂机器人数据传输与转换系统、元宇宙智能喷涂机器人虚拟孪生系统、元宇宙智能喷涂机器人网络系统、元宇宙算法系统:所述船舶智能高空喷涂机器人物理系统用于支撑机器人在高空中的稳定性,包括可调节的支撑腿或支撑装置;驱动机器人的运动系统,提供精确的定位控制,确保喷涂过程中的高精度;负责实际的喷涂工作,将喷涂材料(如油漆)从储罐中输送到喷涂枪;处理机器人所有的控制指令和数据,用于用户输入和机器人操作的界面;用于提供动力源和通讯接口。
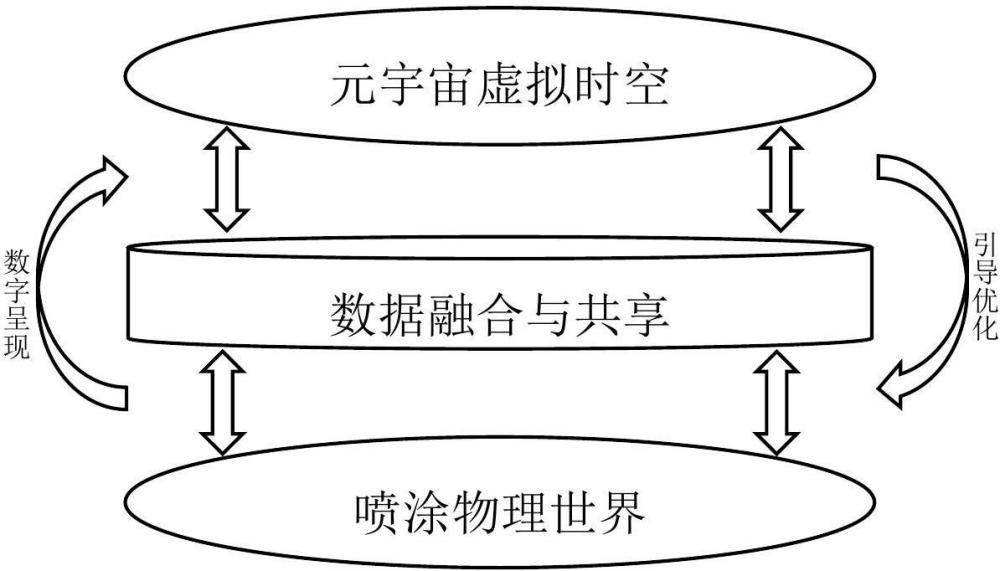
41、所述元宇宙整体智能喷涂机器人系统用于包括喷涂物理世界、数据融合与共享、蚁群算法路径规划、数字孪生等。用于将喷涂物理世界,通过人工智能技术转换为元宇宙虚拟时空。从而起到虚实结合的目的,通过虚拟世界反应真实世界的信息及状态,做到提前预判真实世界遇到的紧急事故。
42、所述元宇宙智能喷涂机器人数据传输与转换系统包括数据采集模块、数据传输系统、数据转换模块、数据分析与优化、云存储与计算、用户界面、中央处理单元和安全与隐私保护。用来将传感器接收的信息和数据通过转换器,把物理信号转换为虚拟信号,并实时接收物理世界机器人本体的反馈信号。
43、所述元宇宙智能喷涂机器人虚拟孪生系统包括数据孪生、形状孪生、路径孪生。用于接收虚拟数据和信息,通过虚拟孪生技术孪生虚拟数据、机器人本体形状、机器人路径规划。将孪生后的信息通过元宇宙虚拟时空展示,并实时反馈至传感器系统。
44、所述元宇宙智能喷涂机器人网络系统包括物理空间管理平台、数据系统管理平台、虚拟孪生管理平台、网络基站、平台服务系统等。用于将通讯系统中的物理空间管理平台、数据系统管理平台、虚拟孪生管理平台通过网络基站相连接,并引入平台服务系统实时记录地图、气象等环境变化。通过机器人本体和机器人传感设备作为元宇宙虚拟时空的数据供给来源。
45、所述元宇宙算法系统包括虚拟环境建模、信息素更新、路径选择机制、蚂蚁行为模拟、路径优化模块、实时反馈系统、数据管理系统等。用于提供路径孪生的信息来源,并通过改进蚁群算法得到迭代次数最少、平均路径最短的目的。通过与宇宙算法系统将改进后的算法路径孪生至元宇宙虚拟时空。考虑到传统蚁群算法启发性较为单一,并且容易陷入最优解。为解决这一问题采用对距离启发函数进行归一化处理,确保所有蚂蚁的路径在适应度评估时具有公平性,这样可以更好地引导搜索过程。改进距离启发函数如下:
46、 (1)
47、为两目标点间的距离,分别为起点和目标点。
48、与现有技术相比较,本发明具有以下几个优点:
49、以船舶智能高空喷涂机器人物理系统、元宇宙整体智能喷涂机器人系统、元宇宙智能喷涂机器人数据传输与转换系统、元宇宙智能喷涂机器人虚拟孪生系统、元宇宙智能喷涂机器人网络系统、元宇宙算法系统等技术,进行相互融合、反馈,并使用蚁群算法对其进行路径规划,通过元宇宙虚拟时空展示的方法。实现喷涂现场的数字孪生信息收集、分析、决策等功能,以提高工厂的工作效率、监控设备的工作信息,减少因生产造成的事故、减少水电资源的浪费和环境污染。
50、传统蚁群算法忽略各节点间的实际误差距离,最后将得出机器人起点到终点的距离总是多出一部分时间。因此,为解决以上问题,作者提出将机器人起点到终点的总距离采用归一化处理,避免因节点过多造成的距离增加问题,为解决传统算法容易陷入局部最优问题,这样可以更好地引导搜索过程。针对传统蚁群算法的缺点,减少距离启发函数之间的节点次数,解决了因节点过多造成的距离增加问题;采用指数函数归一化处理,解决了陷入局部最优解。基于以上发明理由,此发明方法可推广于船舶与海洋工程的加工制造领域。
- 还没有人留言评论。精彩留言会获得点赞!